舰载直升机着舰周期指示器的发展综述
2022-07-01 02:14李爱军胡雪松王瑜杨庶禹科
航空科学技术 2022年6期
李爱军,胡雪松,王瑜,杨庶,禹科
1.西北工业大学,陕西 西安 710072
2.航空工业西安自动飞行控制研究所,陕西 西安 710065
在现代海战中,舰载直升机担负了侦察救护、反潜反舰、两栖突击、空中预警,以及运输补给等多种使命[1-2],已经成为各国海军重要的军事装备[3]。但由于舰载直升机起降操作过程中面临着复杂的海洋环境,大大增加了直升机飞行员的操纵难度。在高海况下,舰船甲板的剧烈运动和复杂的舰艉流场环境都会增加飞行员的操纵强度,甚至威胁到飞行员的生命安全[4-6]。因此,需要一种可以实时指示舰船甲板运动静息期的直升机着舰辅助设备,以保证直升机触舰时的甲板运动在直升机安全着舰限制范围内,方便飞行员执行着舰操作,提高着舰效率和安全性。
着舰周期指示器(landing period designator,LPD)是美国海军开发的一套完整的直升机着舰视觉辅助设备。通过为飞行员提供基于直升机机械和动态限制方面的舰船甲板运动评估,以确定执行直升机着舰操作的适当时机,为舰载直升机全天候作战提供支持[7]。同时LPD系统也可用于给出无人直升机着舰指令,辅助无人直升机进行自主着舰[8]。
本文详细论述了LPD系统的基本原理、发展历程及实现方法,并给出了工程应用实例,展望了LPD系统在我国的应用前景,以促进国内舰载直升机着舰辅助设备的研制,增强高海况下我国舰载直升机的海上应用能力。
1 基本原理
LPD系统由运动参考单元、标准操作系统计算机、能量指标算法、舰船运动处理程序以及外部指示灯组成[7]。通过能量指标算法实时判断舰船甲板运动静息期,再通过外部指示灯向直升机飞行员传递甲板运动状态信息。
能量指标(energy index,EI)算法将舰船的运动特性、飞行器结构动态极限和飞行员人为驾驶因素结合为一个经验公式[9-10]。指标中包含舰船的加速度、速度和位移项,给出了舰船在未来短时间内的运动状态指示,从而实时指示舰船甲板运动静息期。能量指标值的大小与舰船的动能和势能相关。当指标较小时,舰船较为平稳运动幅值较小。当指标值大于一定危险阈值时,将不能保证直升机着舰安全。该危险阈值根据指定舰船-直升机组合的动态结构限制确定,定义为直升机着舰甲板安全运动极限值[9]。
能量指标算法通过标量形式定义了直升机着舰过程中的甲板运动静息期,以及甲板安全运动极限。只有当海浪对舰船作用一定能量时,舰船才会从稳定状态转移到危险状态。由于受舰船自身的物理结构限制,能量在传递过程中存在一定的时间延迟。因此,舰船甲板的运动由能量指标定义的甲板静息期上升到甲板安全极限值的过程中存在一个最小上升时间,最小上升时间只与特定的舰船-直升机组合有关,与海况等级、甲板风速等外部环境因素无关。最小上升时间可以通过试验以及理论分析得到。对于英国Type-23 护卫舰与Lynx MK3 直升机,最小上升时间为4.8s[11];而对于美国FFG-7护卫舰与海王直升机,其最小上升时间为5s[12]。当直升机由能量指标指示的甲板运动静息期内开始着舰,并在最小上升时间范围内完成快速着舰任务时,即可确保直升机触舰时甲板运动在安全极限以内,从而保证直升机着舰安全。
2 着舰周期指示器发展历程
LPD 的发展起源于一些相关底层仿真技术的进步,如舰船运动仿真技术(SMS)以及舰船运动程序(SMP)的开发。起初,美国海军(USN)使用SMS 技术研究舰船运动过程中由产生加速度到发生位移的延迟时间。研究发现,可以通过指标的形式实时表示舰船运动状态,从而辨识出能够确保直升机安全着舰的甲板运动静息期[9]。
1973年,美国海军报告建议制订一个研究计划,开发一种运动预测着陆辅助设备,以改善飞行操作。为了改进未来的海军直升机起降作战,必须开发一个静息期预报器,它至少能为俯仰和俯仰相关响应提供8~10s 的未来预报,并为滚转提供20s的未来预报[13]。最初的能量指标形式为

1976 年,美国海军在USS Koelsch 号护卫舰上对该指标进行了海上甲板运动测试。测试结果表明,通过该指标可以区分甲板不同运动幅度周期。根据测试结果,Love等对能量指标形式提出了两点关键性修正意见:一是能量指标中应该包含影响直升机着舰安全的相关自由度;二是应该确定能量指标降低到指定安全阈值后,经过一定时间间隔(4s、6s、8s)的最大运动幅度包线[9]。1983 年O’Reilly 首先提出了多种不同的能量指标算法[14-15]

式中:s1~s8为静态权值系数,φ为舰船横摇角,θ为舰船纵摇角,ψ为舰船偏航角,x为甲板着舰点纵向位移,y为甲板着舰点横向位移,z为甲板着舰点垂向位移。
式(2)中EQ.5中的系数与直升机安全着舰要求相关,通过加入权值系数,能量指标将直升机着舰稳定性与舰船运动联系起来。通过EQ.5 也可以对舰船运动相位滞后和能量指标上升时间进行分析。
1987 年,根据技术合作协议,美国海军将DI 技术通过加拿大国防部移交给了Canadair 公司,以继续发展LPD 技术应用[16]。后续试验过程中发现,在复杂且不断变化的海况下,基于静态加权系数的EI指标曲线会出现大量瞬时上升时间,与能量指标方法判断甲板静息期的基本原理相悖。在LPD MKⅡ项目研发过程中,通过一个子程序计算不同海况下的静态加权系数,以确保在不同海况下,权值收敛到一个最优解[17]。在计算机求解最优权值的过程中,LPD 显示“待命”状态。在仿真数据测试过程中,LPD MKⅡ出现了2~3s 的延迟。但在实际舰船运动数据测试过程中,由于实际数据中的振动噪声影响,导致LPD MKⅡ未能成功退出“待命”状态。最终,LPD MKⅡ项目以失败告终。1990 年,Thibodeau 尝试通过修正EI 指标中的横向速度项解决上述问题,但这种方法会不必要地限制其他相关角度变化[18]。
在LPD MKⅢ项目中,提出了一种基于动态加权系数的能量指标算法

这种算法被广泛应用于后续的LPD研究中[9]。1992年年初,Canadair 公司提出将LPD 项目的研发测试计划分为三个阶段进行[19]:(1)理论证明:编程、组装并测试一个预原型LPD系统,最终提出一个满足实际应用要求的LPD可行性方案;(2)LPD 样机研制:Canadair 公司开发并组装了两台原型LPD试验系统。一台用于LPD的海上试验,另一台作为Canadair 的参考系统;(3)装配一台完整的LPD 设备,并安装在机库上实现LPD完整可视化系统。
1993 年8 月,Ferrier 等在实验室对完整的LPD 组件进行了仿真测试,测试报告中提出LPD已经具有足够的可操作性确保美国海军进行海上试验[20]。
1995年,英国皇家海军对LPD系统进行了载人飞行仿真测试,飞行员执行直升机着舰过程的最后进场阶段任务。在不同直升机-舰船组合、不同海况、不同舰船速度及海浪角的情况下,评估LPD 系统对着舰任务的辅助作用。飞行员对LPD 系统的着舰辅助作用给出了积极的评价[21],且在最高7级海况下,LPD给出的最小上升时间仍在4~5s之间[22]。
1996 年10 月27—29 日,英国皇家海军历时三天开展了Avalon 测试项目,在Lynx 直升机和Type23 护卫舰上进行了LPD海上测试。根据Avalon项目测试数据,英国防卫评估研究署(DERA)针对LPD出现的问题提出了相应的软件修正方法。1999 年10 月11—15 日,修正后的LPD 被安装于萨瑟兰号护卫舰上,开展了Excalibur 测试项目。本次测试完成了LPD在舰船转弯过程中的性能测试,但由于本次测试过程中始终为2级海况,未能充分验证LPD系统的着舰辅助能力[11]。
1998 年,Ferrier 分析了高海况下LPD 系统的着舰辅助作用[23]。2000 年,Ferrier 提出了AOG-LPD 系统的概念。舰船自动导航系统(active operator guidance,AOG)的作用是为舰船操纵员提供最优的海上航行路线。AOG-LPD系统可以向舰船操作员提供最适合直升机着舰操作的航向和速度信息,再由LPD系统向直升机飞行员给出着舰指令,执行着舰操作[11-24]。
2000年,澳大利亚海军在“海王”直升机、“黑鹰”直升机和HMAS Manoora两栖登陆舰上测试了LPD系统性能。此次测试重点分析了不同舰船重量(质量)、不同阈值限制,以及滤波器对LPD能量指标性能的影响[12]。
2004 年,在LPD 载人飞行仿真试验取得较好效果的前提下,Ferrier等研究了LPD在无人直升机着舰过程中的应用,使用LPD 给出无人直升机着舰指令,实现无人直升机自主着舰[25]。
2005 年7 月26—29 日,美国海军在SH-60 直升机和DDG-79驱逐舰模型的基础上进行了载人仿真飞行测试[7]。同年,英国海军在Merlin 直升机-Type45 驱逐舰上对LPD系统进行了载人飞行仿真试验[26]。两次仿真试验都对比了有无LPD条件下的直升机着舰情况。其中,英国海军还分别在白天和夜间环境中,对LPD的着舰辅助作用进行了对比分析。测试结果表明,在有LPD辅助作用下,缩短了直升机着舰过程时间,提高了直升机着舰效率。参加测试的飞行员高度评价了在夜间视觉信息缺失的条件下,LPD 系统的辅助作用[7]。
2007 年,Brook William Sherman 综述了DI 技术的发展,并对比了LPD能量指标算法与另一种海浪能量表示方法,并提出了能量指标算法的缺点。能量指标算法主要通过上升延迟时间保证直升机安全着舰,因此不具备预测性,无法预测甲板运动将处于某状态的时间,且能量指标为标量值,也无法描述舰船甲板的运动趋势[27]。
2014—2017年,在后续研究过程中成功应用LPD系统实现了MQ-8b火力侦察兵无人直升机在护卫舰及濒海战斗舰上的自主着舰操作,并对比了一天内不同舰船的能量指标上升时间变化趋势,验证了能量指标算法的实际应用性能[28-29]。
3 组成及实现方法
一套完整的LPD装置由运动参考单元、包含标准操作系统的计算机、能量指标算法、舰船运动处理程序以及外部指示灯组成[7]。其中,运动参考单元用于测量舰船甲板的运动状态[8];舰船运动处理程序及能量指标算法作为软件包集成在计算机中;外部指示灯显示能量指标计算出的甲板运动状态,向直升机飞行员及船上的操作员提供对应信息;计算机显示器实时记录能量指标算法结果、舰船甲板运动数据以及直升机着舰安全限制[7]。
3.1 LPD软硬件组成
1992 年预装配的完整LPD 系统由硬件及软件两部分组成[9]。其中,硬件包含三个主要部分:舰船运动测量传感器组件(SMP)、信号调节组件(SCP),以及包含标准操作系统的计算机(PC)。舰船运动测量组件包含一个三轴角速率陀螺仪、三个线加速度计和两个角摆仪。信号调节组件接收传感器组件发出的模拟信号,包含电压隔离模块及抗混叠滤波系统两个部分。信号调节组件由计算机中的抗混叠滤波控制卡控制。信号调节组件的输出信号传输到计算机中的数模转换卡中,数据再由LPD软件进行处理计算[9]。
LPD软件主要由舰船运动处理程序及能量指标算法两部分组成。舰船运动处理程序包括传感器补偿模块,以补偿矫正传感器偏差和比例因子误差;数据变换模块将模拟信号转换为数字信号,进行坐标变换并由加速度计算速度,该模块还包含各种滤波器,以减少转换数据中的振动和传输偏差。最后处理后的数据导入EI能量指标算法,计算对应的能量指标动态权值,以实时计算能量指标的标量值。根据划分的能量指标阈值,区分不同的舰船运动状态[9]。
3.2 LPD-EI能量指标算法
能量指标算法主要包含动态加权系数的计算及阈值标准的确定两个方面。
3.2.1 动态加权系数的计算
能量指标方程由动态系数加权的甲板横向速度及横向加速度、垂向速度及垂向加速度、横摇角及横摇角速度和纵摇角及纵摇角速度组成。该方程为各项参数的加权平方和,其具体形式如下

式中:a1~a8为动态加权系数,实时反映舰船-直升机的运动关系,其具体计算方法分三个部分进行:(1)分别求出4 个自由度及其导数的相关系数。相关系数反映了横摇角和横摇角速度、纵摇角和纵摇角速度、侧向速度和侧向加速度,以及垂向速度和垂向加速度的关系。而这些关系都直接与舰船速度、相对海浪角、海浪高度和模态周期相关。(2)计算耦合自由度之间的相关系数。舰船在运动过程中,耦合的自由度为横摇和侧向运动、纵摇和垂向运动。耦合意味着两个自由度的运动是直接相关的,只有在非常特殊的情况下才会独立发生。纵摇和垂向运动通常同时发生但却很少同相位。耦合自由度之间的相位滞后有助于能量指标的稳定。早期研究中发现,纵摇运动的峰值通常出现在垂向位移峰值之前。(3)对比直升机着舰各自由度的安全限制,完成每个自由度参数的计算。
如式(5)所示,将三个部分的因子相乘以实时计算出能量指标动态权值系数。再通过式(4)可以实时得到能量指标值。系数计算流程如图1所示。

图1 能量指标动态系数计算流程[12]Fig.1 Energy index dynamic coefficient calculation flow chart

2016 年,Tri D.Ngo 在进行能量指标算法仿真过程中,提出了一种通过一段时间内各个自由度运动的最大值进行标准化的简化系数计算方法[30-31]

式中:Tsim为仿真时间。
3.2.2 阈值标准的确定
由式(4)计算的能量指标标量值的大小与舰船甲板运动状态和直升机着舰安全限制直接相关,反映了直升机着舰过程中的甲板动能和势能大小。为了方便向直升机飞行员和舰船操作员表达甲板运动状态,能量指标值被划分为4个甲板可用性区域[7],由不同的信号灯颜色表示:红色为危险状态,黄色为警戒状态,黄绿色相间为安全状态,绿色为非常安全状态(表示甲板运动静息期)。其阈值划分与舰船结构特性、直升机着舰安全要求、飞行员操作因素直接相关,由LPD系统开发人员与进行船上测试的工程师协调确定[27]。对不同的直升机-舰船组合必须通过试验测量和理论分析制定不同的能量指标划分阈值。阈值确定方法及外部指示灯对应甲板运动状态如图2、图3所示。
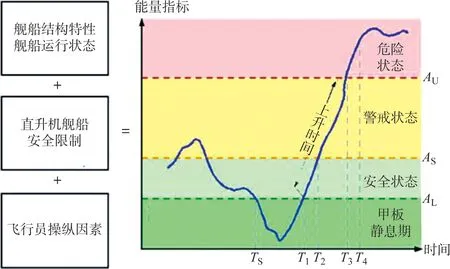
图2 能量指标阈值划分方法[8]Fig.2 Threshold partition method of energy index

图3 LPD指示灯与甲板状态对应关系[7]Fig.3 Correspondence between LPD indicator and deck status
红色阈值表示直升机甲板安全操作极限值,当能量指标值大于红色阈值时,意味着一个或多个甲板运动自由度超出了直升机着舰安全极限[32]。当能量指标值小于红色阈值时,甲板运动在可接受范围内。能量指标值由绿色阈值上升到红色阈值的时间(甲板运动由静息期结束变化到甲板安全极限的时间)定义为上升时间。上升时间可能会受到海况、海浪迎角等环境因素的影响,但由于舰船的物理结构限制,对于给定的舰船-直升机组合存在一个与环境因素无关的最小上升时间。通过试验和分析,可以确定对应直升机-舰船组合的最小上升时间。因此直升机在绿色状态(甲板运动静息期)时开始执行着舰任务,在最小上升时间范围内完成着舰任务,即可保证直升机在完成着舰时能量指标值在红色阈值内(甲板运动在可接受范围内),直升机安全着舰。
3.3 直升机着舰测试
本节以MQ-8b(火力侦察兵)无人直升机着舰测试为例,介绍LPD应用测试过程。MQ-8b火力侦察兵无人直升机是美国诺斯洛普·格鲁门公司研制的一种垂直起降无人机[33],MQ-8b 无人直升机已经实现了在舰船上无人干涉的自主起飞和降落[34-36]。
美国海军将MQ-8无人直升机系统的地面控制站及无人机都安装在一艘配有航空装置的战舰(主要为濒海战斗舰(LCS)和护卫舰)上,将其作为舰载垂直起降无人机[28]。为了能使MQ-8无人直升机在没有飞行员的情况下安全降落在甲板上,美国海军使用LPD装置实时指示舰船甲板运动静息期,辅助无人直升机着舰,其着舰测试过程如下:
首先,通过海上测试及理论分析,确定对应机舰组合的能量指标阈值定义和最小上升时间。对于MQ-8b 无人直升机与FFG-56 护卫舰,定义其最小上升时间为5s,能量指标阈值范围为:0~1.74 为绿色区域表示甲板运动静息期,1.74~4.0为黄绿色区域表示安全甲板区域,4.0~9.99为黄色区域表示警戒甲板区域,≥10为红色不安全甲板区域[28]。
然后,通过海上测试,验证能量指标算法性能。主要验证了能量指标值表示的甲板运动状态能与实际甲板运动状态相对应,最小上升时间定义符合实际海上测试结果。
最后,美国海军对MQ-8b无人直升机进行了LPD系统辅助下的着舰测试。图4 为MQ-8b 无人直升机的着舰过程。无人直升机起初悬停在距离甲板安全助降网格系统3m的上方位置。LPD系统计算甲板能量指标,并在能量指标标量值到达甲板运动静息期时,向无人直升机地面站发送着舰指令。在无人直升机收到着舰指令后,开始以约1m/s 的速度下降,从低空悬停位置降落到甲板网格上用时在4s以内,小于最小上升时间。确保无人直升机触舰时,甲板运动状态在安全极限范围内。

图4 MQ-8b无人直升机着舰过程[28]Fig.4 Landing process of MQ-8b unmaned helicopter
4 结束语
LPD能量指标方法将复杂的甲板运动转化为易于直升机飞行员理解的灯光信号,以指示甲板运动静息期,向直升机飞行员发出着舰指令,保证即使在高海况下直升机着舰过程中的甲板运动仍在安全极限范围内,能够提高我国舰载直升机高海况着舰能力及着舰安全,在我国具有广泛的应用前景和发展潜力。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2021年12期)2021-03-29
船舶标准化工程师(2020年1期)2020-06-12
机械研究与应用(2020年2期)2020-05-21
科学与财富(2018年25期)2018-10-19
航空工程进展(2018年3期)2018-08-31
国防(2017年12期)2017-04-09
舰船科学技术(2016年1期)2016-02-27
中国船检(2013年11期)2013-08-15
环球时报(2009-09-16)2009-09-16