
仿海豹胡须阵列检测水中运动目标尾流特征
2022-07-01 09:23孔德义熊玉林
哈尔滨工业大学学报 2022年6期
王 森,徐 贺,孔德义,熊玉林
(1.中国科学院 合肥物质科学研究院智能机械研究所,合肥 230031;2.中国科学技术大学 信息科学技术学院,合肥 230026;3.中国科学院 种子创新研究院,北京 100101)
水下航行器在航行时,会在经过的区域产生尾流。尾流的区域特性与水下航行器的几何尺寸、轨迹方位等密切相关。因而可以通过检测并分析水下航行器的尾流特征参数,来估算水下航行器的位置、航向、特征长度大小等信息[1-3]。当前常用的尾流检测方法主要有:声学检测、光学检测、遥感检测等。声学检测探测距离远,但在地形复杂的浅海海域,水下混响等会对声学检测产生较大的干扰[4]。光学检测方向性好,灵敏度高,但是激光在水体中损耗程度高[5]。遥感检测可在一定高度对广泛区域进行检测和搜索,但是难以实现对深水层目标的探测[6]。随着现代水下航行器的隐身技术、降噪技术的发展以及易受实际水下复杂自然环境干扰和人工干扰的影响,使得传统声学、光学等尾流探测技术作用十分有限,因此对于水下航行物的探测需要研究新的方法和途径。
国外有专家研究了海豹在无法通过视觉和听觉来感知外界信息的情况下,仍然可以使用胡须来探测猎物的踪迹。如Schulte-Pelkum 等[7]开展了大量实验,证实海豹在眼睛和耳朵均被蒙住的情况下,可以通过胡须捕捉水流细微扰动,从而实现对猎物的定位和跟踪。此后,围绕海豹胡须的作用机理,Fish等[8]发现海豹胡须的横截面近似为椭圆形,并且沿其轴向具有重复的波峰波谷分布。Hanke 等[9]基于仿真和粒子成像速度分析技术,发现海豹胡须特殊的几何形态有利于减少自激振动。Beem 等[10-11]基于海豹胡须特殊的几何形态设计了单根水中压阻传感器,提高了传感器检测精度。此外,他们还利用该传感器感知迎流,并对传感器测得的振幅和偏角进行分析,从而实现对流速和流向的测量。Kottapalli等[12-13]同样模仿海豹胡须的几何形态,研发了微机电系统(Micro-electro-mechanical system,MEMS)压电传感器。相比于圆柱状传感器,该传感器具有更高的灵敏度,可以探测到流速低于193 μm/s的扰动。然而,目前对海豹胡须的研究和应用主要集中在几何形态分析及提高单根传感器的检测精度等方向,通过传感器阵列来综合感知尾流特征的研究较少。本文结合海豹胡须感知尾流机理,设计了一种模仿海豹胡须探测的尾流感知传感器,并组成传感器阵列对水中运动目标尾流特征进行检测。
1 尾流感知传感器设计
海豹胡须具有良好的流体探测能力,呈图1(a)[8]所示的波浪起伏状。海豹胡须内部组织主要为自体感觉皮质区,简化结构如图1(b)所示[14]。自体感觉皮质区主要包括两部分,一部分为体外波浪起伏状胡须,另一部分为体内感知窦体。
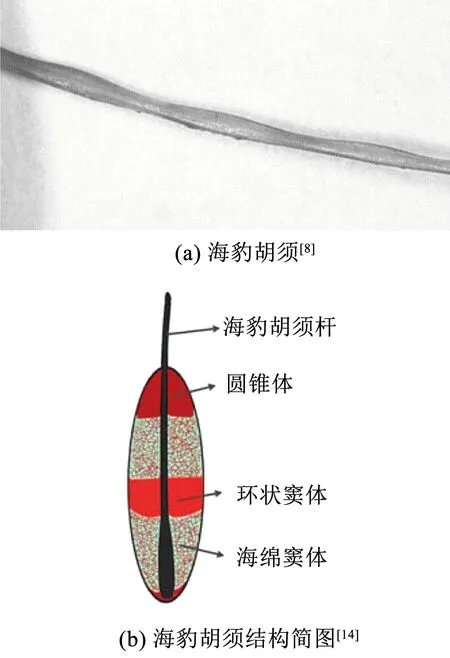
图1 海豹胡须模型Fig.1 Seal whisker model
海豹胡须几何形态可以看作具有椭圆形状的横截面,沿其长度伸展方向具有重复的波峰和波谷排列。以文献[15]测量的尺寸为基础,同时为充分获取流场信息并结合现有加工条件,设计了一种尺寸放大10倍的胡须模型,该胡须模型采用3D打印技术及光敏树脂材料制作。制作了具有4个波浪起伏状周期、总长L=137.92 mm的胡须模型,如图2所示。图2(a)、2(b)为同一个胡须模型的不同方向视图,图2(a)为长轴方向的正视图,图2(b)为短轴方向的正视图,其中胡须模型的长轴波峰Wa=10.50 mm,短轴波峰Wb=4.38 mm,长轴波谷Wk=8.32 mm,短轴波谷W1=3.56 mm,长轴方向与短轴方向上的波峰波谷截面中心之间的距离M均为17.24 mm。
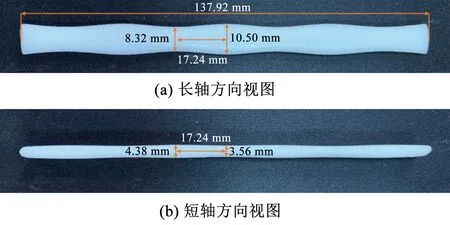
图2 仿海豹胡须模型长轴、短轴视图Fig.2 Long axis and short axis view of bio-inspired seal whisker model
模仿海豹胡须的尾流感知传感器系统如图3所示,主要包括Arduino处理器、运算放大器、柔性压阻式敏感元件、胡须模型4部分。考虑到海豹胡须感知主要涉及到偏转量的动态测量,采用柔性压阻式敏感元件作为感知元件,通过运算放大器使压阻元件的输出信号与实际压力值呈线性关系。其中柔性压阻式敏感元件为Tekscan公司生产的A201薄膜压力传感器,测量范围为0~4.4 N,厚度为0.203 mm,线性误差<±3%,重复性<±2.5%,迟滞性<±4.5%,漂移<5%。该传感器质量轻、厚度小、感测精度高,常用于工业、医疗触力测量。

图3 尾流感知传感器系统Fig.3 Wake sensing sensor system
2 尾流检测实验方案
尾流检测实验平台主要由传感器支撑架、导轨支架等构成,图4为尾流检测实验平台示意图。尾流检测实验在实验室水槽中进行,水槽上方搭建了由步进电机驱动的移动滑台,将导轨支架固定在移动滑台上,传感器支撑架在导轨支架牵引下实现水平方向运动,如图5所示。胡须模型与压阻元件采用纳米聚氨脂(PU)胶凝合材料黏结,并固定于传感器支撑架上。
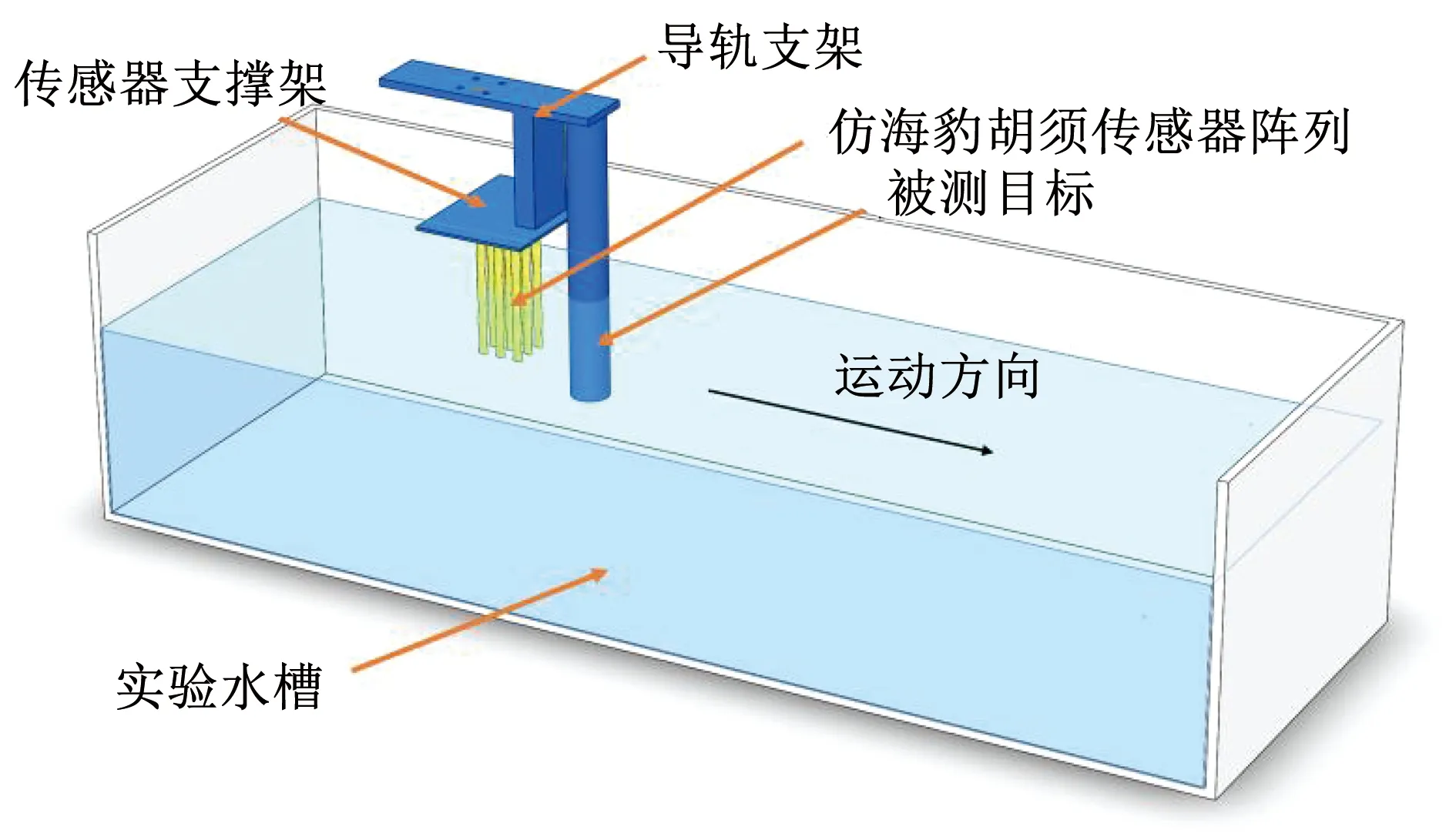
图4 尾流检测实验平台示意图Fig.4 Schematic diagram of wake detection experimental platform
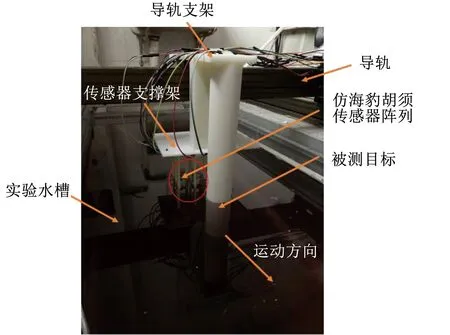
图5 尾流检测实验平台Fig.5 Wake detection experimental platform
本实验采用直径D=4 cm的圆柱作为被测目标。为简化实验及避免尾流到达水槽壁面产生回波干扰,该被测目标与传感器阵列同时以1.0 m/s的速度进行匀速直线运动。为使胡须模型自身产生的扰动降到最低,将胡须模型的长轴方向与运动方向保持一致,即夹角(胡须模型的长轴方向与运动方向之间的夹角)为0°。位于被测目标后方的9个传感器组成3×3方形阵列,具体分布方式及编号如图6所示。设定纵向与运动方向一致,与纵向正交方向为横向。第1列传感器(S11、S12、S13)分别位于被测目标正后方6、8、10 cm,第2列传感器(S21、S22、S23)和第3列传感器(S31、S32、S33)分别在横向方向偏离2、4 cm。为将尾流可视化,在水槽中加入深色墨水(凌美公司的T52非碳素墨水),如图7所示。图7(a)为静止状态下的流场情况,无漩涡生成,图7(b)为拖拽实验条件下的流场情况,被测目标正后方有漩涡生成,漩涡中心均在运动轨迹两侧相距6.74 cm的范围之内。根据尾流生成情况,结合传感器阵列与被测目标的相对位置,得知S11、S12、S13、S21、S22、S23位于尾流区,S31、S32、S33位于非尾流区。胡须模型受到尾流作用时发生偏转,使得压阻元件产生形变,引起电阻发生变化,经电信号滤波放大后采集数据,从而获取尾流特征信号。
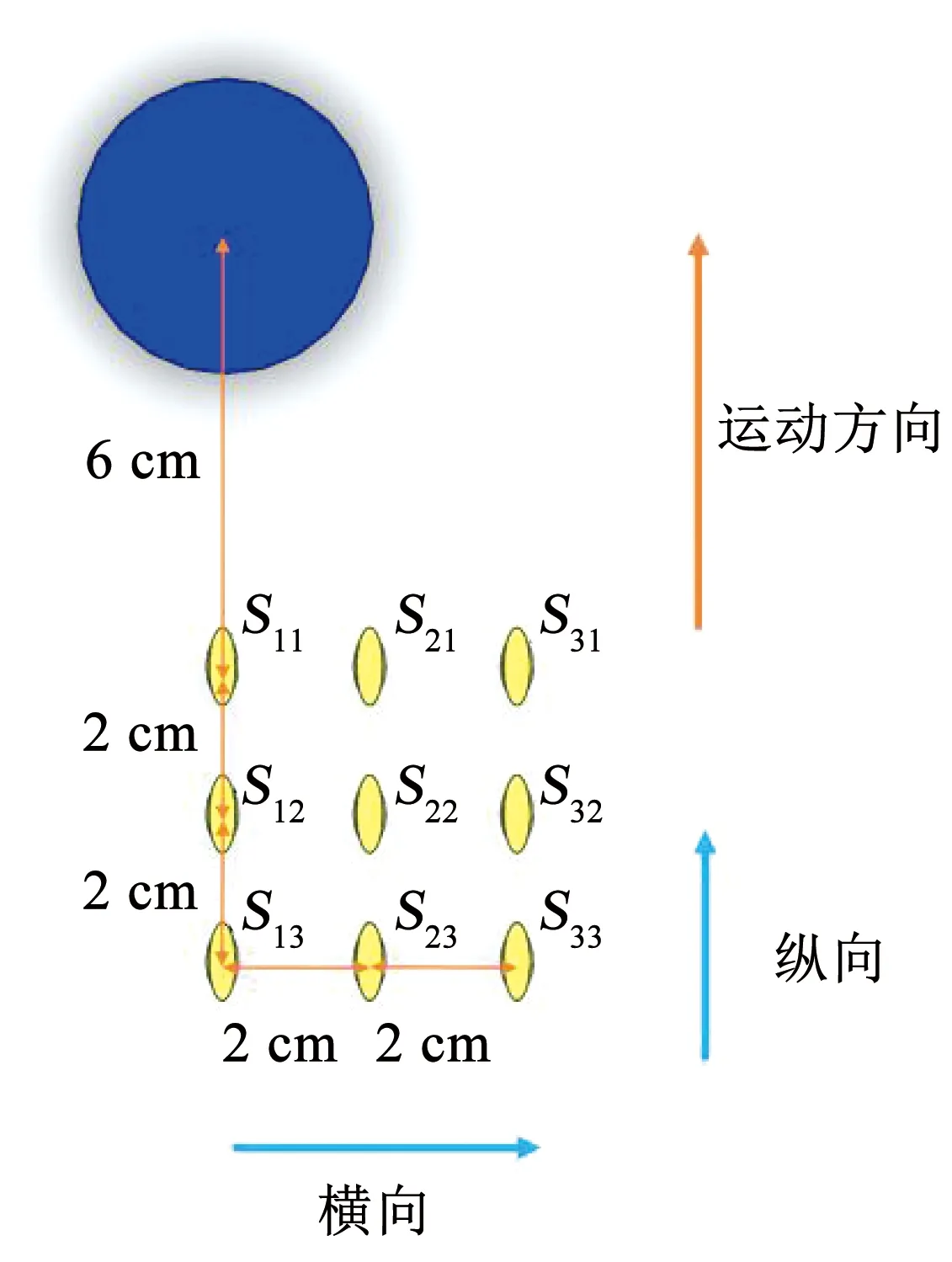
图6 传感器阵列编号标注及相对位置示意图Fig.6 Schematic diagram of relative positions of sensor array
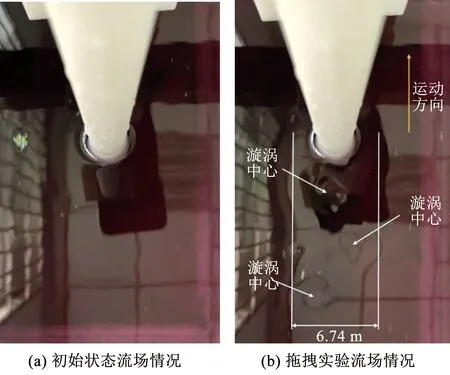
图7 尾流可视化Fig.7 Wake visualization
3 尾流检测实验数值仿真分析
本文模仿海豹利用胡须在静水中对运动目标的尾流检测,为便于仿真,考虑相对运动的等效转换,仿真中设定流速分别为0.5、1.0、1.5 m/s的均匀来流,同时考虑到仿海豹胡须对尾流检测的通用性,设定具有微小波动的非均匀流场情况。将被测目标及传感器阵列作为相对静止的参照物,仿海豹胡须阵列前方放置被测目标以用于生成尾流,各参数与实际尾流检测实验参数一致,即依照图6标注及相对位置参数建立几何模型。
3.1 网格划分
在模拟尾流检测实验时,被测目标后方生成尾流,流动相对复杂,因此采用非均匀分布的网格划分,靠近被测目标及仿海豹胡须阵列所在区域网格加密,如图8所示。
3.2 边界条件设定及数值求解方法
网格划分之后对模型边界进行如下设置:1)设定速度入口。均匀来流的流速设定分别为0.5、1.0、1.5 m/s,方向与出口垂直。非均匀来流中的微小扰动设定如图9所示,在入口处增加一组直径大小为0.02 m、间隔为0.05 m的圆柱阵列,入口设定为1.0 m/s的定常流,定常流经过圆柱阵列时会生成微小波动,从而形成非均匀流动。2)设定压力出口。出口压力为0 Pa,方向与出口垂直。3)其余边界设定为无滑移壁面边界。
考虑到有湍流漩涡的生成,为保证有较高的可信度和精度,采用RNGk-ε湍流模型进行求解。按照进口边界对整个流场进行初始化,在计算过程中,为满足模拟结果精度要求并保证计算效率,设定时间步长为0.01 s,所有残差精度控制均为10-3。
3.3 仿真结果与讨论
图10为不同流场情况下的尾流速度场仿真云图,速度梯度越大,则表示受尾流扰动越大。图10中S11、S12、S13、S21、S22、S23附近尾流速度梯度较大,因此受尾流扰动影响较大。同样,S31、S32、S33受尾流扰动程度较小。该仿真结果与实际拖拽实验流场可视化结果相符合。
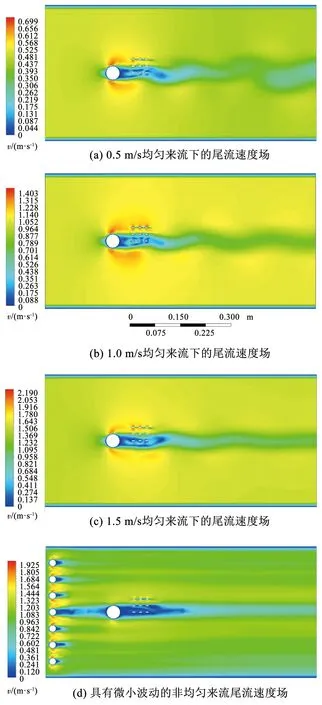
图10 不同来流情况下的尾流速度场Fig.10 Wake velocity field under different incoming flow conditions
获取仿真中S11的升力系数(lift coefficient),该升力系数可表示S11表面所受流体力情况,不同来流情况下的S11升力系数如图11所示。在均匀来流及抛物线分布的非均匀来流情况下,S11受被测目标尾流场作用,升力系数随时间变化,且波动具有一定规律性。而对于有微小波动的非均匀流情况下,S11受微小波动及被测目标尾流的叠加影响,升力系数波动无明显规律。
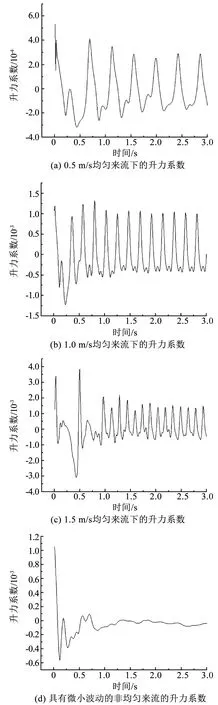
图11 不同来流情况下的升力系数Fig.11 Lift coefficient under different incoming flow conditions
本实验条件下被测目标产生尾流的特征参数之一是尾流漩涡脱落频率[16]。被测目标的尾流漩涡脱落频率f可以被测目标通过特征长度(直径)D和斯托劳哈尔数St表示,计算方法如下[17]:
(1)
式中U为来流速度,在尾流的亚临界区内St≈0.2。由式(1)可计算出均匀来流情况下的尾流漩涡脱落频率。对于具有微小波动的非均匀流而言,可看作扰动信号(微小波动)及1.0 m/s均匀来流的叠加。具体理论及仿真计算的结果见表1。
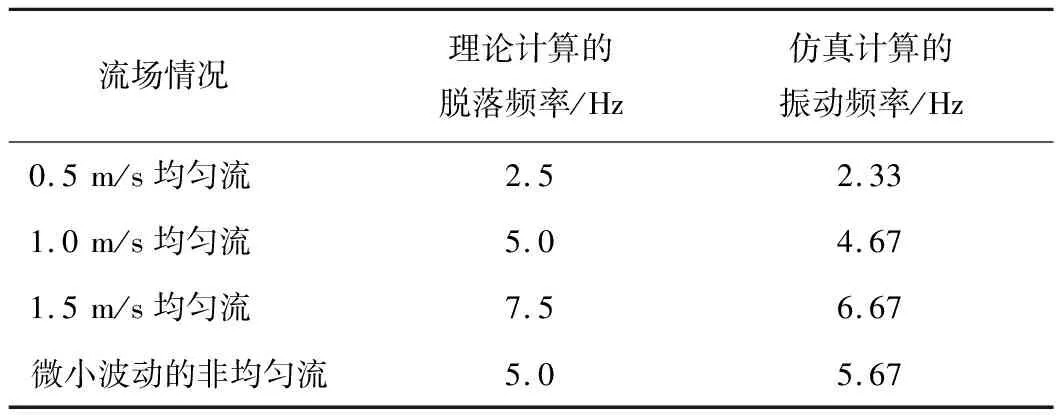
表1 不同流场情况下的尾流漩涡脱落频率Tab.1 Wake vortex shedding frequency under different flow fields
在不同流场情况下,理论计算得到的尾流脱落频率与仿真计算得到的振动频率相差均小于1.0 Hz,表明理论与仿真计算的结果具有良好的一致性。增加微小波动之后的频谱分布中,有部分频率低于2.0 Hz的信号,该信号为微小波动造成的扰动,但对理论计算得到的尾流脱落频率5.0 Hz无明显影响。由此可知,采用仿海豹胡须方法检测尾流具有一定的通用性。
4 结果与分析
4.1 仿海豹胡须阵列尾流检测实验结果
为了排除导轨启动时信号陡增现象(传感器由静止到运动时出现的信号陡增现象),只考虑信号的中间阶段,表2所示为尾流信号检测结果,为探究尾流对胡须的扰动程度,对每个传感器5 s内测得的电压信号取算术平均值获得平均电压值。图12为传感器阵列的电压时域信号(黑色曲线,对应右侧坐标轴电压及顶部坐标轴时间)及经快速傅里叶变换之后对应的频域信号(红色曲线,对应左侧坐标轴功率谱密度及底部坐标轴频率)。图12(a)、(b)黑色曲线为第1、2列传感器测得的振动信号,由于受尾流扰动,电压值在0~4 V。图12(c)黑色曲线为第3列传感器测得振动信号,电压值均在0~0.7 V,振动幅度比尾流区低。对振动响应信号进行快速傅里叶变换获得主频以估算被测目标参数。第1列传感器(被测目标正后方的传感器)平均电压值均比第2列传感器(偏离运动方向的传感器)、第3列传感器(非尾流区的传感器)平均电压值高,即尾流扰动程度高。
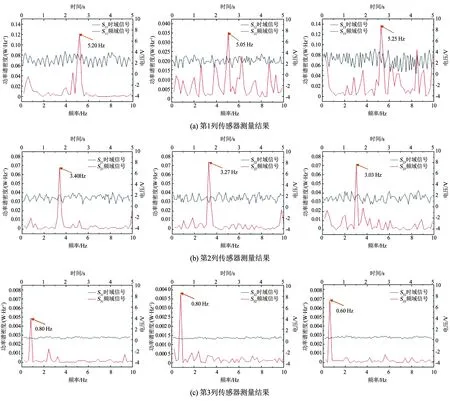
图12 仿海豹胡须阵列的振动响应Fig.12 Vibration response of bio-inspired seal whisker array
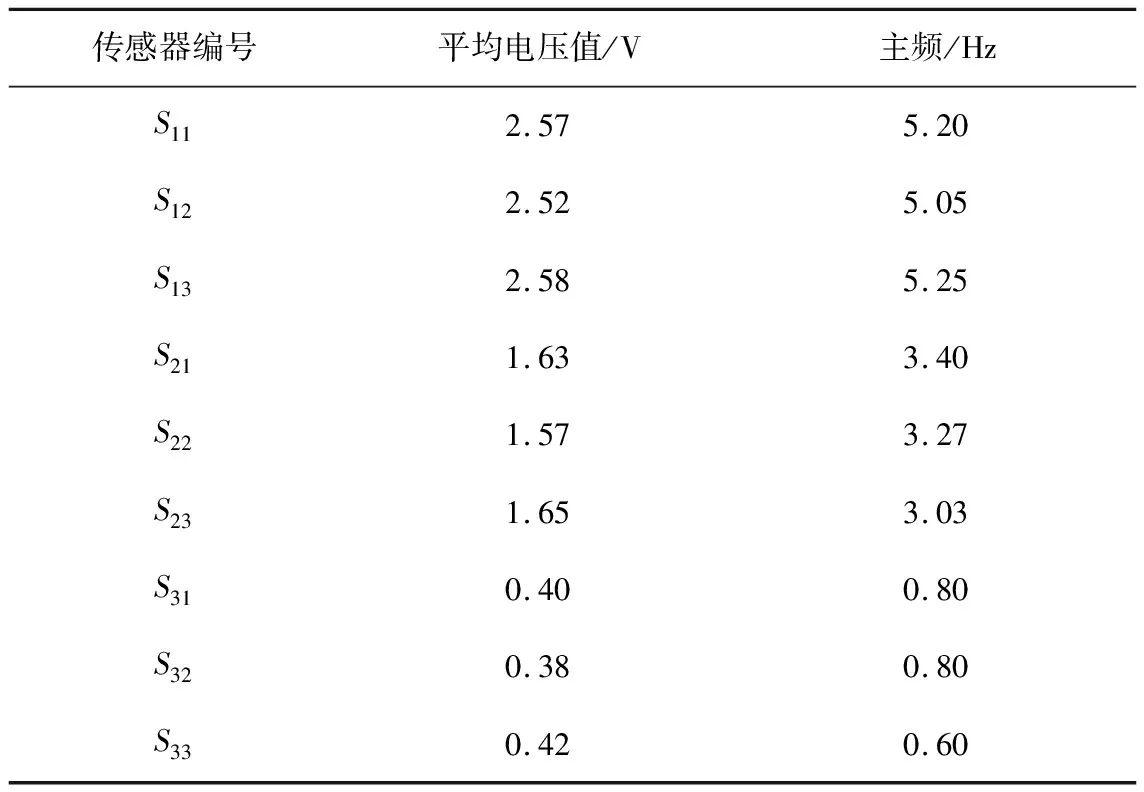
表2 传感器阵列测得的尾流信号结果Tab.2 Wake signal results measured by sensor array
4.2 尾流区的识别
如前文所述,作用在压阻传感器上的力与输出的电压成正比,即胡须模型受尾流扰动程度与电压成正比。图13为不同跟踪距离的传感器平均电压值,横坐标表示被测目标与传感器的纵向跟踪距离,纵坐标表示对应纵向跟踪距离传感器的平均电压值。从图13可以看出:尾流区中平均电压值均在1.5 V以上,而非尾流区平均电压值在0.5 V以下,尾流区的平均电压值是非尾流区中的3倍以上。因此,在有无尾流情况下传感器获取的时域信号平均电压值有明显不同,基于平均电压值的比较可以对尾流区和非尾流区进行区分,如果探测到尾流的平均电压值高于某一阈值,则可以判断此时位于尾流区。为保证明显区分尾流区与非尾流区,将S33平均电压值(非尾流区内最大的平均电压值)2倍设定为判断阈值,即本实验中尾流区与非尾流区阈值设置为0.84 V,当平均电压值高于0.84 V时则表明此时传感器位于尾流区,否则位于非尾流区,从而检测并判断出是否有尾流存在。
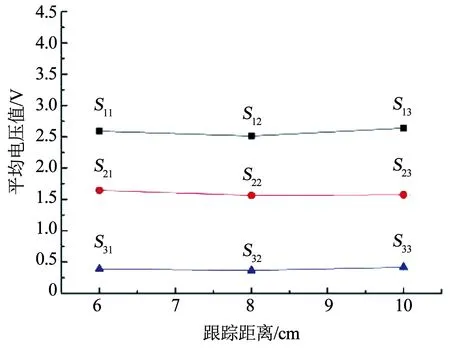
图13 不同跟踪距离的传感器平均电压值Fig.13 Average voltage value of sensors with different tracking distances
4.3 运动轨迹方向估算
图14为偏离运动轨迹方向上的传感器平均电压值,用横坐标表示胡须中心与被测目标中心之间的横向距离,纵坐标表示每个传感器测量的平均电压值,其中Si1(i=1,2,3)表示纵向距离为6 cm的3个传感器,即S11、S21、S31,同理Si2、Si3分别表示纵向距离为8 cm和10 cm的传感器。
从图14可以看出,尾流强度会随着与偏离中心线距离的增加而逐渐衰减。当传感器位于被测目标正后方时,平均电压值最高,随着偏离距离的增加,平均电压值逐渐减小,在非尾流区中数值最小。由此可根据平均电压值衰减程度来判断传感器与被测目标运动轨迹方向的偏移距离,即平均电压值越高,则越接近被测目标运动轨迹中心。通过横向排列的传感器平均电压值减小方向,获取平均电压值衰减的梯度方向,该梯度方向即为被测目标的大致运动轨迹方向,从而可以实现对被测目标的运动轨迹方向估算并进行跟踪。
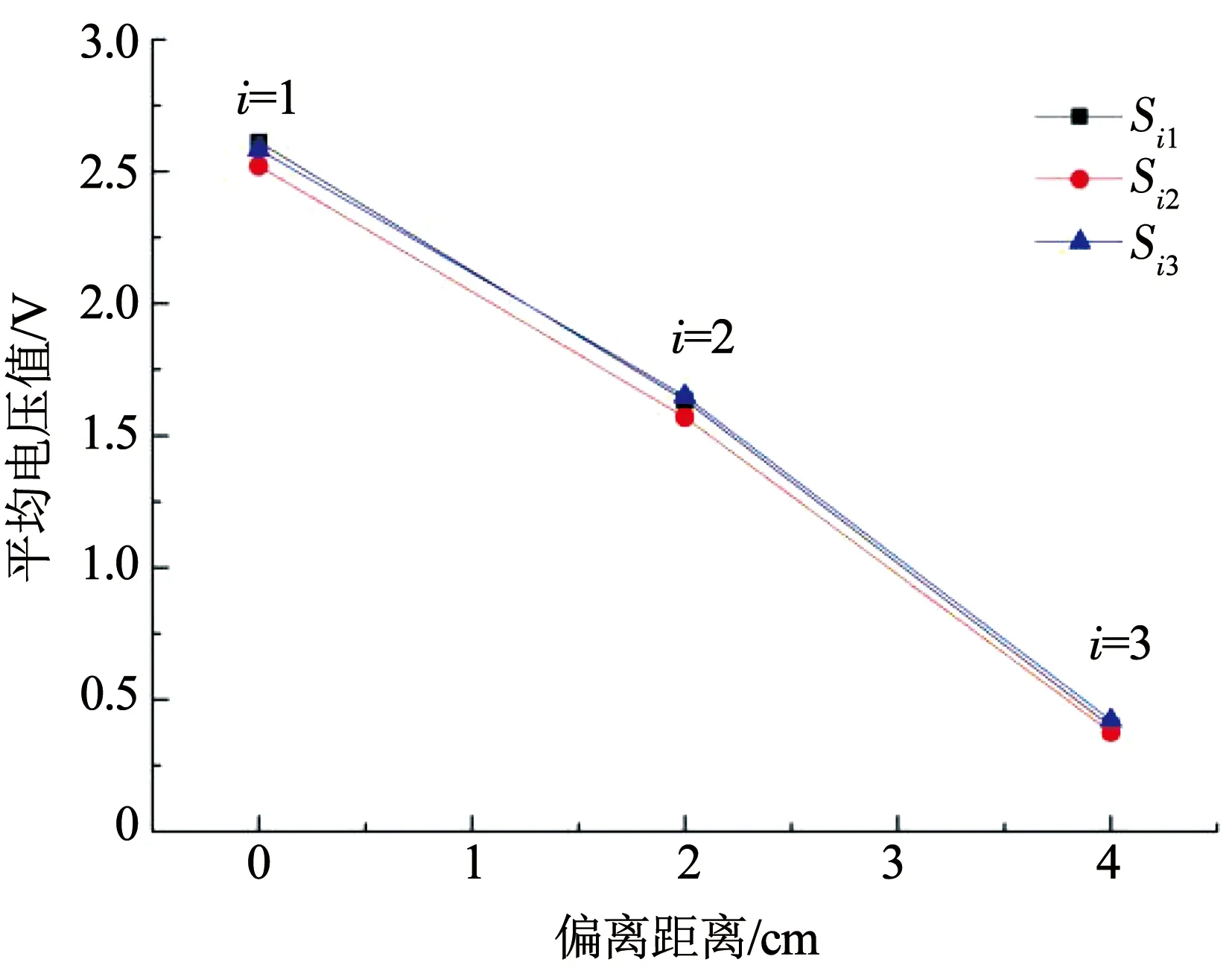
图14 不同偏离距离的传感器平均电压值Fig.14 Average voltage value of sensors with different deviating distances
4.4 被测目标大小估算
根据表2中不同传感器的主频数据知尾流边缘区域的传感器(S31、S32、S33)检测到的主频为0.60~0.80 Hz,该信号可能由传感器自身扰动或尾流回波引起。根据被测目标正后方尾流的仿真计算主频为4.67 Hz,实际测试表明,位于正后方的3个传感器检测到的最大主频为5.25 Hz,结合扰动信号叠加,仿真计算的主频与实际测试的主频较为一致。根据式(1)计算出被测目标特征尺寸为3.81 cm,与实际特征尺寸4 cm接近。可见,通过检测到的最大响应频率信息可以估算被测目标的特征尺寸。
4.5 仿海豹胡须夹角对尾流检测的影响
海豹在对猎物的尾流进行感知的过程中会频繁摆头,从而导致胡须长轴方向与流体运动方向产生一定夹角,即夹角不为0°。为探究仿海豹胡须夹角对尾流检测的影响,设定0°、45°、90° 3组不同的夹角进行尾流检测实验,其他参数设定与图6所示的实验方案保持一致。实验获得的平均电压值见表3,主频见表4。
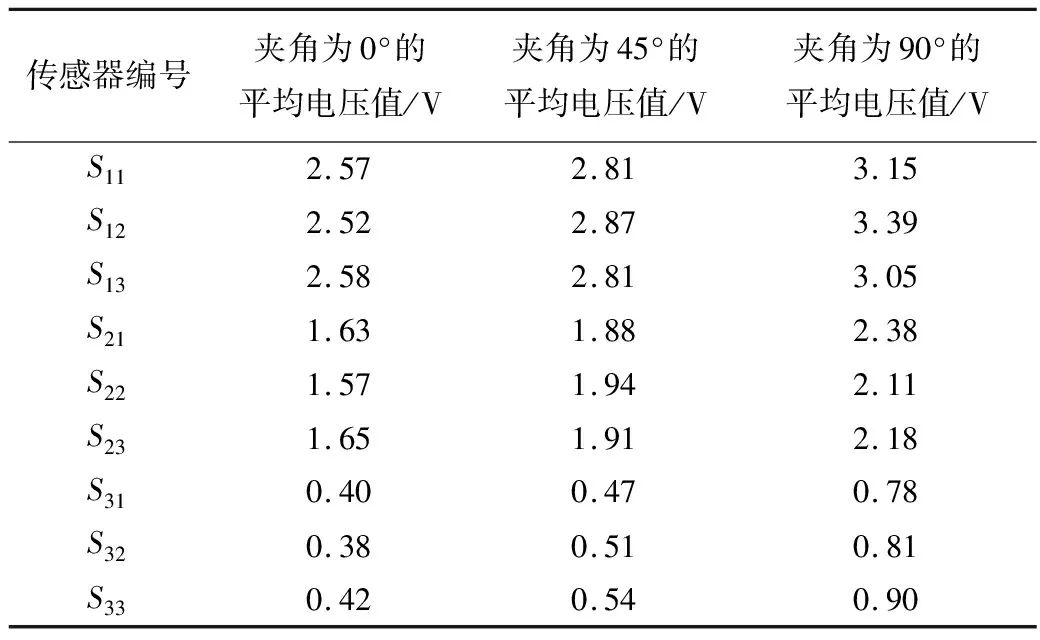
表3 不同夹角下传感器阵列测得的平均电压值Tab.3 Average voltage measured by sensor array at different angles of attack
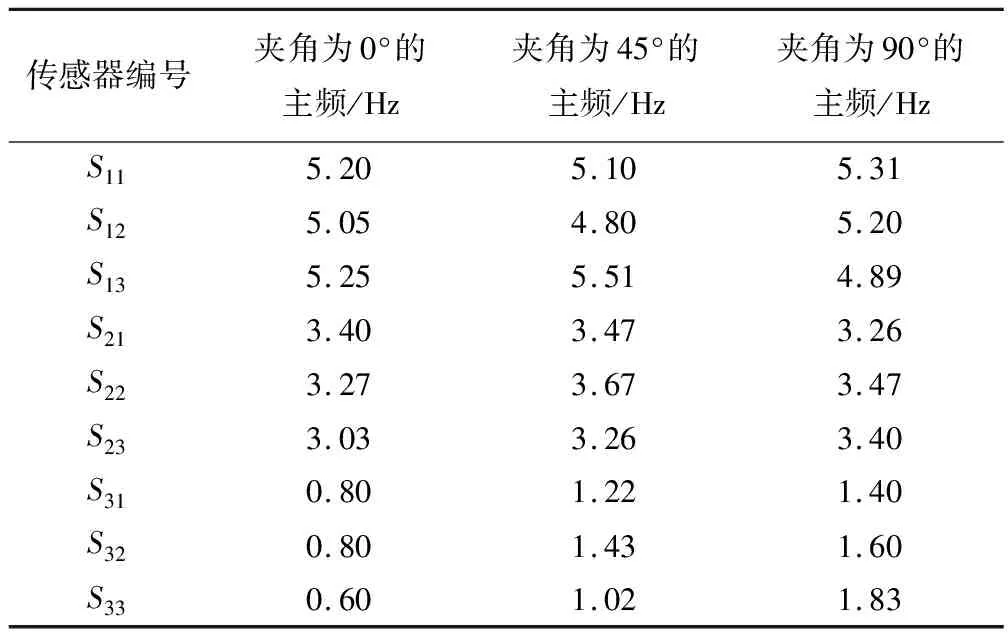
表4 不同夹角下传感器阵列测得的主频Tab.4 Main frequency measured by sensor array at different angles of attack
4.5.1 仿海豹胡须夹角对平均电压值的影响
图15为仿海豹胡须夹角与平均电压值的关系曲线,随着夹角的逐渐增大,平均电压值也会逐渐增加. 由前文可知,基于平均电压值的大小来对尾流区和非尾流区进行区分,基于平均电压值的速度梯度方向来对运动方向进行估算。图15可以看出,仿海豹胡须传感器获得的平均电压值由明显的层次区分及速度梯度的变化,因此仿海豹胡须夹角的变化对尾流区的区分及运动方向的估算影响较小。
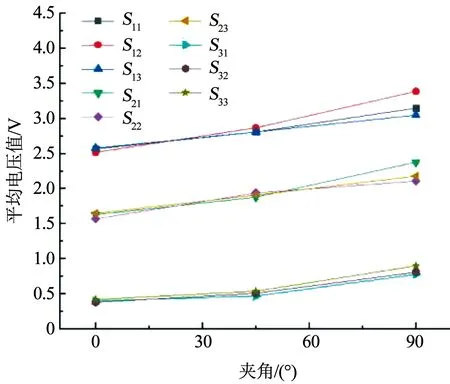
图15 不同夹角的传感器平均电压值Fig.15 Average voltage value of sensors at different angles of attack
4.5.2 仿海豹胡须夹角对主频的影响
图16为仿海豹胡须夹角与主频的关系曲线。由前文可知,基于主频可以对被测目标物的大小进行反演估算。图16可以看出,对于非尾流区的仿海豹胡须传感器而言,其主频逐渐增加,表明仿海豹胡须模型会产生一定的涡激振动,导致扰动信号不断增强。对于正后方的仿海豹胡须传感器而言,主频信号均在4.80~5.60 Hz之间,反演得到的被测目标物直径大小范围为3.57~4.16 cm,与实际直径尺寸4 cm接近,因此仿海豹胡须夹角的变化对被测目标物的直径尺寸的估计并无影响。
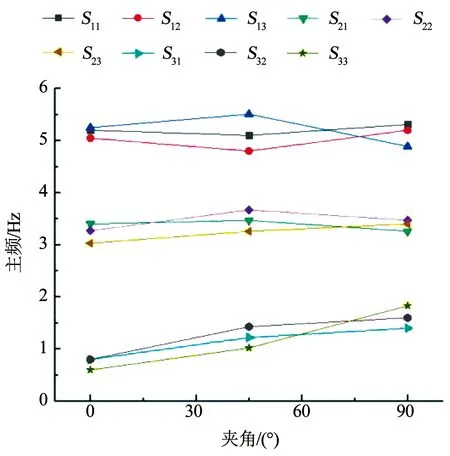
图16 不同夹角的传感器主频分布Fig.16 Main frequency distribution of sensors at different angles of attack
5 结 论
1)在模仿海豹胡须尾流探测基础上,提出一种仿海豹胡须传感器阵列检测水中运动目标尾流特征的方法,获取尾流时域信号。
2)仿海豹胡须传感器输出信号与胡须模型受尾流扰动程度成正比,基于此,若仿海豹胡须传感器阵列输出电压的平均电压值超过设定阈值,则可判断出此时胡须模型位于尾流区。
3)获取仿海豹胡须传感器阵列中的平均电压值衰减的梯度方向,从而估算出被测目标的运动轨迹方向。
4)对尾流信号进行快速傅里叶变换获得主频特征参数,通过对主频参数进行反演计算,实现对被测目标特征长度的估算。
5)分析仿海豹胡须夹角对尾流检测的影响,随着夹角逐渐增大,仿海豹胡须传感器产生的自身扰动随之增大,但对运动轨迹方向的估算及被测目标尺寸的估计无明显影响。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
中外文摘(2020年11期)2020-06-29
西安航空学院学报(2018年5期)2018-10-15
中学生数理化·高一版(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
小朋友·快乐手工(2015年6期)2015-07-01
