
基于无迹变换的协同探测与速度方向控制制导律一体化设计
2022-07-01 10:08丁力全孟凡坤白显宗戴智洋
弹道学报 2022年2期
丁力全,吴 楠,孟凡坤,白显宗,戴智洋
(1.解放军信息工程大学 数据与目标工程学院,河南 郑州 450000;2.兴城特勤疗养中心,辽宁 葫芦岛 125105;3.军事科学院 国防科技创新研究院,北京 100071)
单飞行器探测具有探测精度低、抗干扰能力弱、躲避攻击能力差、跟踪目标能力不足、杀伤力小等弱点。而利用飞行器进行协同探测,可以有效地改善单飞行器探测存在的弊端,飞行器协同探测也成为了近年来的研究热点。当前,对于协同探测研究的主要处理方法是利用信息融合技术进行数据处理,对于制导律的研究多是建立在目标已知的情况下进行的。
再入飞行器(如机动弹头等)返回大气层时,受到升力和阻力影响,如果不对其进行控制,很可能发生脱离标准轨迹等情况,因此,飞行器的制导设计尤为重要。当前,协同制导的方法大致可分为开环式和闭环式两种方式。开环式制导方式指飞行器之间没有信息的交互,是各飞行器之间按照自身制定好的制导方式进行飞行。闭环式制导方式更注重的是多飞行器之间的信息交互与传输,通过信息的共享完成协同制导。因此闭环式的方式更加贴合实际,更具有研究和应用意义。
在闭环式制导中,包含集中式协同和分布式协同两种制导方式。集中式协同方式是将各飞行器的数据传送至其中一个飞行器(主飞行器)中,从而实现信息的共享。分布式协同方式是相邻飞行器之间实现信息互通,通过一定的规则进行制导。集中式制导方式的精确程度要高于分布式制导方式,但在通信要求、稳定性等方面略逊于分布式制导方式。
对于集中式协同制导,赵世钰等提出了把协调变量和时间约束的制导律相结合的协同制导方法,但该方法可能会出现超过载的情况。针对该问题,文献[8]将文献[7]的方法转化为了系统的稳定性问题进行求解。文献[9]为了解决多枚导弹同时攻击共同目标时的寻的制导问题,引入了多导弹协同制导的新概念,提出了协同比例导航制导律,通过协同减小制导精度直至拦截,实现同时攻击。
对于分布式协同制导,文献[10]将剩余时间信息作为输出用来调整系统误差,实现了有约束和无约束攻击角度的情况下的协同打击,但该方法的模型建立相对复杂。文献[11]提出了一种新的分布式合作指导法(BPNG),确保了在固定或切换传感/通信网络下对冲击时间的协同,拓扑需求限制较少。文献[12]提出新的分布式制导方法,对测量噪声造成的误差、通信延迟等具有挑战性的情况进行了修正。
上述方法均存在计算复杂、提取的信息量多等情况。且当前对于制导律的研究多是集中在目标位置已知的情况下来进行的,对于位置未知的地面目标,无法准确判定其落点。飞行器对地面目标进行探测时,随着飞行器与目标的距离不断减小,定位的精度也会不断提升。而对于飞行器协同探测系统,为了实现精确定位与打击的目的,对飞行器的落速方向也有着严格的要求。
基于这一考虑,本文利用协同探测定位算法与速度方向控制的制导律方法相结合,在实时探测定位的基础上,将协同探测获取的目标位置估计信息同步传输至各飞行器中,对飞行器的制导律进行控制,形成探测与制导控制的一体化闭合回路。随着目标定位精度的提升,飞行器的飞行姿态和位置误差逐渐减小。通过分析雷达和红外飞行器导引头协同定位的可行性,对协同探测与基于速度方向控制的不同探测类型飞行器制导律进行一体化设计。利用协同探测提升定位精度,同时通过无迹变换的方式对速度方向控制的制导律进行更精准地计算。
1 算法分析
本文的算法流程图如图1所示,通过在协同探测滤波估计中获得的新时刻目标位置估计数据,代入速度方向控制的制导方程,以此对动力学模型中的姿态角和飞行器位置坐标进行计算,实时对飞行轨迹进行修正。该算法既能通过飞行器间通信的方式避免角速率提取的复杂计算,又能提升飞行器的姿态角和定位精度,减小飞行过载。为了方便计算与对比,飞行器在协同探测数据处理中的融合算法选用集中式融合算法。
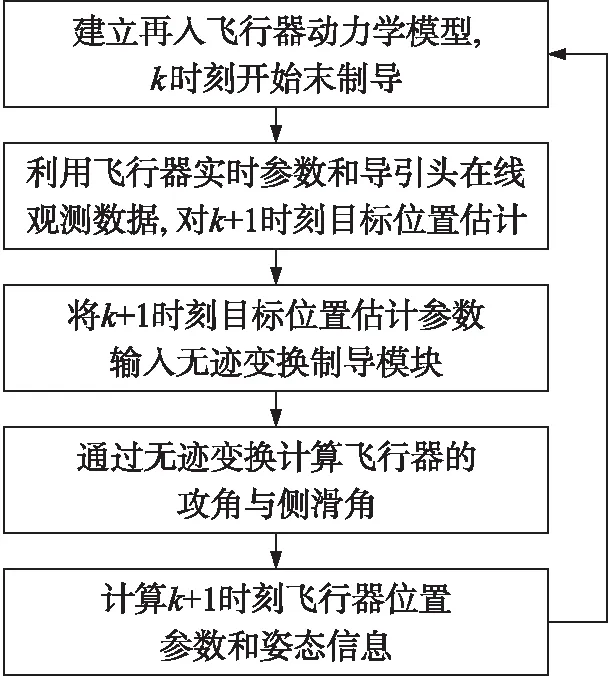
图1 协同探测与最优制导律一体化方法流程图
1.1 目标位置估计
1.1.1 模型建立
以一个雷达、一个红外导引头为例,对于静止目标的位置进行估计。
(1)状态方程
状态矢量设为目标在飞行器发射坐标系中的位置、速度和加速度矢量

(1)
(2)观测方程
观测方程即为观测矢量=()与状态矢量的函数关系。假设飞行器在发射坐标系中的位置矢量为
,M=(,M,M,M)
(2)
在视场坐标系下,视线矢量可表示为
(3)
利用视场坐标系中的视线矢量计算观测矢量:

(4)
112 融合算法
以一个雷达、一个红外导引头为例,选用集中式融合的方法进行两传感器间的信息融合。雷达导引头作为主滤波器,红外导引头作为副滤波器,集中式融合原理见式(5),飞行器间通信原理如图2所示。红外导引头将时间、位置、速度和姿态角等信息传送给主滤波器雷达导引头进行融合滤波,之后再将估计的目标位置、速度等信息传送回红外导引头,实现数据共享。融合公式如下:

(5)


图2 飞行器间通信原理
在建立了两个飞行器观测方程和目标状态方程的基础上,便可以通过滤波算法和信息融合算法对飞行器间的数据进行处理,从而可得到地固系下目标位置、速度和加速度的估计值+1。本文选择无迹卡尔曼滤波(UKF)算法,具体步骤见文献[14]。
113 过程噪声方差自适应设计
地面静止目标相对于飞行器可以看做是匀加速运动的模型。由文献[15]可知,对于未知输入的过程噪声,其过程噪声矩阵由位置和速度产生的噪声量级在10,因此噪声近似可看作完全由加速度产生,则模型离散化系统噪声协方差阵为
=diag(0,0,0,0,0,0,,,)
(6)
式中:、、为对应加速度分量的离散化白噪声方差。为了便于过程噪声方差的设计,利用一阶Markov过程描述加速度。以分量为例,此时过程噪声方差可以表示为

(7)

由于目标为地面目标,其相对飞行器的加速度变化范围较为固定,通常取值于某有限区间∈[0,],因此假设加速度在区间内满足均匀分布,则其方差为

(8)
可根据目标型号性能特征确定,机动频率取飞行时间的倒数。
一般情况下,对于地面目标,取固定值。但过程噪声是用一阶Markov过程来描述的,采用固定的数值进行描述难以降低过程噪声带来的误差。因此可以通过实时更新的数值对过程噪声进行自适应。一步预测值与实际观测值的差反应了过程噪声带来的误差影响,当二者差值越大时,说明过程噪声影响较大,的值越大;反之越小。因此,通过一步预测值和实际观测值的差来确定的值可以有效降低过程噪声带来的误差影响,提升滤波性能。具体方法如下:
由于目标加速度变化较小,在采样间隔足够小时,时刻和+1时刻的加速度可描述为
+1=+Δ
(9)
对于匀加速运动,一步预测值可表示为
(10)
由于观测数值已知,上式可近似描述为

(11)

一步预测值和观测值的差可表示为

(12)
其均值为
(13)
方差可表示为

(14)
由此,可对过程噪声进行实时更新。
114 初始化模块设计
由于雷达传感器能够测得距离、俯仰角和方位角信息,因此,可以利用雷达导引头在前两个时刻的观测信息进行初始化设计。
目标的位置速度初始化可表示如下:
已知第一组雷达测量数据为(,,),相应的标准差分别为,,。则测量数据的协方差矩阵为

(15)
将视场坐标系(RS)的视线矢量转换至地固系(ECF):

(16)
则目标在地固系中的位置矢量为
(17)
根据测量数据到状态矢量的函数方程,以及测量数据的均值和方差,便可以利用无迹变换进行误差传播分析。导引头在初始过程中由于未加入末制导,因此其位置、速度和姿态角等信息可以根据发射的初始信息来确定。
1.2 基于无迹变换的制导律设计
假设有个不同类的导引头对目标进行协同定位,他们之间通过信息融合技术,得到目标的估计位置,引入落速方向控制的导引律,解算得到制导参数。同时,为了消除滤波带来的误差,本文采用无迹变换的方式,通过输入目标的估计位置和协方差矩阵,输出攻角、侧滑角及其对应的协方差矩阵,进一步提升攻角与侧滑角的估计精度,减小过载。具体方法如下:
(1)首先构造2+1个Sigma点及其权重,具体步骤见文献[16],其中,Cholesky法分解的协方差矩阵为目标位置估计的协方差矩阵。
(2)利用速度方向控制的方法计算每个点对应的攻角与侧滑角的状态矢量:
()=(),=0,1,…,2
(18)
式中:(·)函数为速度方向控制制导,具体表示方法如下。


(19)

建立制导坐标系(TC,即以目标时刻估计位置为原点的北天东坐标系),则第个飞行器在TC系中的位置和速度的视线矢量坐标分别可以表示为

(20)
(21)

TC系中的速度倾角为

(22)
TC系中的速度偏航角,视线高低角D,,视线方位角T,,视线矢量长度Los,分别可表为

(23)
视线坐标系中的速度矢量为
(24)



(25)
式中:=-4、=-2、=3为最优导引系数,为飞行器落角约束。
定义半速度系HVC,在半速度系中的引力加速度矢量为

(26)

半速度系轴和轴的气动力加速度分量,,,分别为
(27)
根据气动力加速度可以计算半速度系轴和轴的需要气动力参数
(28)
攻角和侧滑角即可由上述机动再入质心动力学方程和导引方程确定。

(29)
式中:为权重值。
2 仿真分析
2.1 仿真参数设置
假设两个飞行器,一个携载雷达传感器,为主飞行器,另一个携载红外传感器,为从飞行器。设发射点的经度108°E,纬度为39.3°N,高度为6 000 m。主飞行器在发射系下的坐标为(0,0,4 000),从飞行器在发射系下的坐标为(0,0,5 000)。两个飞行器在3个方向的速度相同,分别为50.158 m/s,-0.048 7 m/s,0 m/s。雷达测量距离误差为0.3 m,雷达和红外测量的角度误差均为0.2°。在1 s后对飞行器进行速度方向控制制导,初始攻角20°,每个飞行器初始侧滑角0°。比较本文方法(UT变换)与传统的速度方向控制滤波制导方法(无UT变换)相关参数的变化趋势。仿真软件选用Matlab 2016a,处理器为 Intel(R)Core(TM)i5-8265U。
2.2 飞行器攻角和侧滑角变化趋势
对比两种方法下攻角和侧滑角的误差,结果如图3和图4所示。
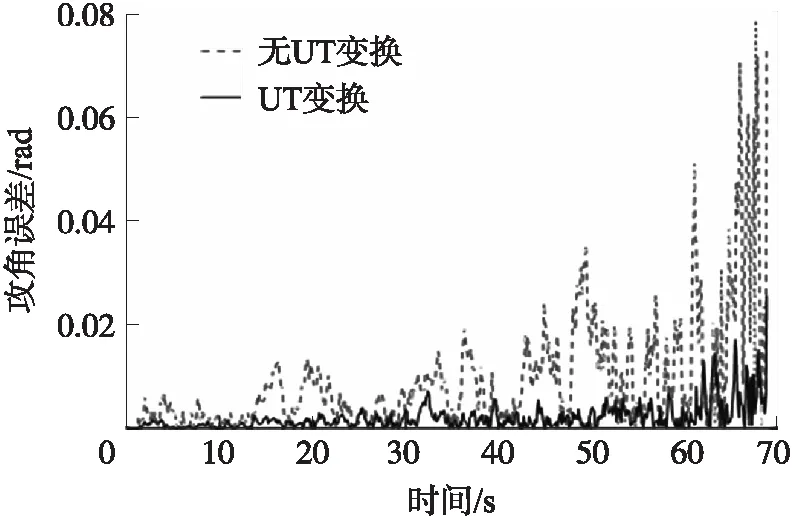
图3 攻角误差对比图
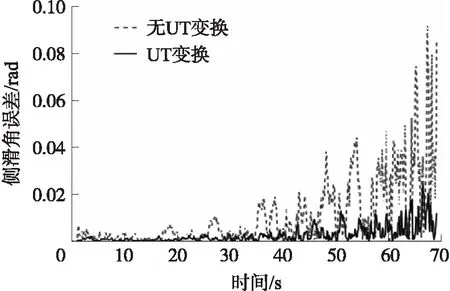
图4 侧滑角对比图
从仿真可以看出,相比于不使用无迹变换的制导方法,采用无迹变换的制导方式后,飞行器的攻角估计误差减小77.5%,侧滑角估计误差减小73.9%。通过输入位置的估计值,利用无迹变换的方法,输出攻角和侧滑角,实时调节在滤波过程中飞行器攻角和侧滑角的误差协方差,提升了制导的精度,攻角和侧滑角的实际值与真值更为接近,误差更小,飞行器的飞行姿态与理想条件下更为接近。
2.3 定位误差精度
分别对两种方法的定位精度进行分析,比较,,方向的均方根误差,结果如图5~图7所示。
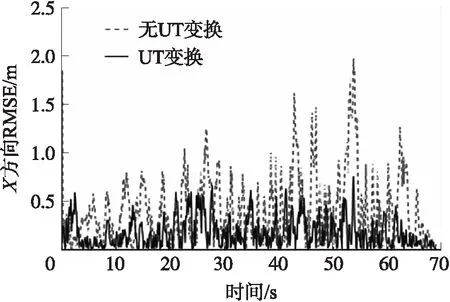
图5 x方向位置均方根误差对比

图6 y方向位置均方根误差对比

图7 z方向位置均方根误差对比
由仿真可以看出,相比于不使用无迹变换的制导方法,采用无迹变换的制导律方式后,方向定位误差减小564,方向定位误差减小596,方向定位误差减小59.9%。从数据中可以看出,本文提出的使用了无迹变换的一体化设计方法,调整了飞行器的飞行姿态,使飞行器与目标之间的相对视线更加接近理想条件,可以有效地提升定位精度。
由于本文中假设的雷达与红外传感器探测精度误差量级相对较小,所以定位误差的结果相差的量级在10左右。但假如传感器的测量误差增大,定位误差大小也会随之增加,因此,本文的方法在实际应用中,对于提升定位精度也能起到很好的效果。
2.4 飞行器过载情况
飞行器的过载可以反映飞行器在全程飞行过程中燃料消耗情况,过载越大,消耗越多。在提升定位精度、控制飞行器姿态的基础上,如何尽量地减小过载也是十分必要的。对标准飞行轨迹、不使用无迹变换和使用无迹变换3种情况下的过载进行仿真分析,仿真结果如图8和图9所示。
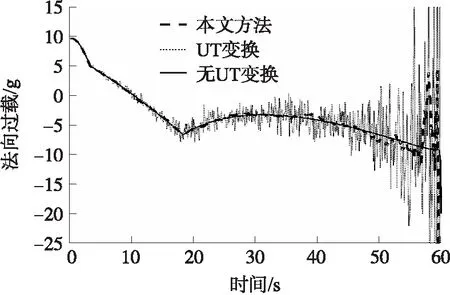
图8 3种情况下法向过载

图9 3种情况下横向过载
由仿真结果可知,协同探测与制导律一体化的两种方法的过载相比于标准飞行器的飞行轨迹略有不同。这是因为标准轨迹下目标为已知量,而将协同探测与制导律相结合,目标的位置是实时发生变化的,与目标的真实位置存在偏差,因此飞行器在接近目标的过程中,飞行姿态角度与真实目标下飞行器的姿态角有所不同,导致过载不同。
对比使用无迹变换和不使用无迹变换计算的两种方法,二者的过载差异并不明显。计算全程飞行过程中的过载绝对值总和可知,标准弹道下飞行器法向过载绝对值总和为2 851.44,横向的过载绝对值总和为1 456.3。当使用无迹变换的方法时,飞行器法向过载绝对值总和为2 864.07,横向的过载绝对值总和为1 469.52。不使用无迹变换时,法向过载绝对值总和为2 973.70,横向的过载绝对值总和为1 537.943。可以看出,基于UT变换的协同探测与速度方向控制制导律方法无论是法向还是横向,其过载绝对值的总和相比于不使用UT变换的协同探测与速度方向控制制导律方法更小。若按理想情况对飞行器制导律进行设计不能满足飞行器的实际过载需求。因此,本文提出的方法在可以在较好地满足需求的情况下,减小飞行器的过载,尤其是当飞行器数量较多时协同探测时,能够起到更好的效果。
3 结论
本文提出了基于无迹变换的协同探测与速度方向控制制导律一体化设计方法,在建立状态方程和观测方程的基础上,首先,通过建立过程噪声自适应方法,利用一阶Markoo过程建立过程噪声模型,通过求解一步预测值与观测值差的均值和加速度,确定当前时刻的最大加速度,提升滤波性能。其次,提出了对本章的提出的一体化设计方法进行论述与验证,将探测数据应用于速度方向控制的制导律设计中,并通过无迹变换降低滤波过程中姿态角估计造成的误差。该方法无论在提升观测位置估计精度、降低飞行器姿态角误差还是减小飞行器过载等方面,均能起到更好的效果,更贴近于实际的工程应用。
猜你喜欢
电脑报(2022年24期)2022-07-01
环球时报(2018-11-30)2018-11-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
兵器知识(2018年6期)2018-06-15
兵器知识(2018年3期)2018-03-07
兵器知识(2018年2期)2018-02-08
兵器知识(2018年1期)2018-01-05
饮食科学(2016年7期)2016-07-27
小朋友·快乐手工(2015年5期)2015-06-06
