基于单相H桥型MMC高速铁路新型同相供电系统
2022-06-30 05:59陈莉,杨飏,陈剑
电气化铁道 2022年3期
陈 莉,杨 飏,陈 剑
0 引言
我国高铁总里程和速度均居世界领先地位,确保高速铁路安全、可靠、经济运行具有重要意义。牵引供电系统是高速铁路动车组唯一的动力源,其供电质量尤为重要。V型接线变压器由两组单相变压器组成,结构简单,特别容易形成大容量供电系统,在我国高铁中已得到广泛应用。
在传统的同相供电系统中,多采用二极管箝位多电平背靠背变换器实现同相供电,该方法需要连接两组背靠背结构的单相变流器。然而,随着系统 容量的进一步扩大,箝位元件的数量会大大增加,子模块的电压均衡控制需要配置额外的硬件辅助电路或算法。
随着电力机车功率逐步提升,所需同相供电补偿装置容量也逐渐提高。而模块化多电平换流器(Modular Multilevel Converter,MMC)具有较高的开关频率、较低的输出THD(总谐波畸变率)和更容易模块化扩展的突出优点[1],可提升变流器的电压等级和容量。文献[2]研究了基于MMC的同相供电变流器,提出了一种基于MMC的铁路功率调节器(MMC-RPC)。为提高单相交-直-交变流器的电压水平和容量,文献[3]提出了一种模块化多电平功率变换关键技术,并进行应用研究,但仍不能完全取消电分相。文献[4,5]提出了一种由同相供电、V/v接线变压器和三相MMC结构的有源滤波器(APC)组成的新型同相供电系统,并研究了该结构的控制策略,由三相APC代替了两相背靠背变换器,节省了一相变换器的桥臂和隔离变压器。文献[6,7]提出了一种基于三相单相变流器MMC结构的贯通式同相供电系统,该系统原理简单,其最大优势是可以节省牵引变压器,但仍然需要使用工频升降压变压器进行电压匹配,并且所需电力电子设备数量明显增加,影响系统的可靠性。
综上,本文提出一种基于SPH-MMC的统一潮流控制器和V/v接线变压器的同相牵引供电方案,并对其数学模型和控制方法进行讨论。根据数学模型和功率平衡原理,计算UPFC(统一潮流控制器)中各端口的补偿电流,既能补偿不平衡电流,也能补偿牵引负荷波动引起的无功功率。为了协调不同工作单元之间坐标的动态特性,给出基于SPH- MMC的同相供电潮流控制器的控制策略,包括系统级控制指令电流的生成、直流电容电压均衡控制、基于PR调节器的二倍频环流抑制、子模块故障容错控制。通过一系列仿真实验证明该控制策略具有良好的控制性能。
1 新型同相牵引供电系统
1.1 系统结构
基于V/v接线变压器与SPH-MMC结合的同相供电系统如图1所示,其中端口α和端口β分别与牵引变压器T1和T2相连接,端口α取消了牵引变电所出口处的电分相,实现了同相供电。端口α不仅与端口β之间可以实现功率传递和负序补偿,还具有无功补偿能力。UPFC的超前相α相与变流器通过LC耦合支路连接。经过精确计算,其不仅可平滤谐波,还能产生无功功率,从而提高变流器补偿谐波和无功的能力。

图1 V/v接线变压器与单相H桥模块化 多电平换流器结合的同相供电系统结构
1.2 补偿原理
通过SPH-MMC能量的双向传递,可以消除电力系统三相不平衡,彻底取消电分相,同时补偿无功与谐波。
设牵引负荷电流表示为

将式(1)两边乘以sinωt后得
式中:iL为负载电流;ILpsinωt为负载电流基波有功分量;ILqcosωt为负载电流基波无功分量;iLh为负载电流谐波分量。
为提高实际应用中低通滤波器的精度和动态速度,本文提出改进的有功电流分离检测方法,生成α侧和β侧SPH-MMC电流环控制的指令电流iref_cα和iref_cβ:

式中:Idc为直流母线电流。
2 控制策略
基于上述综合补偿原理,建立如图2所示的基于SPH-MMC的控制策略模型。系统控制主要包括三部分:
(1)电流跟踪控制。UPFC的主要功能是跟踪参考补偿电流,其性能直接决定了整个系统的性能。通过预测电流模块,可以迫使实际电流跟踪参考电流,实现良好的动态补偿。
(2)SPH-MMC稳压控制。为了确保SPH- MMC功率控制器工作稳定,输出波形质量好,引入SPH-MMC子模块稳压控制,包括平衡控制和均值控制。平衡控制是由电流内环和电压外环组成的双闭环控制结构,一方面,电压外环激励跟踪参考电压,另一方面,当前的内部循环使实际环流跟踪该相单元的环流指令值iz,从而抑制循环。均值控制将有功分量叠加在桥臂上,迫使Uci跟踪,然后可以获得一个误差值,从而通过PI控制器对两者的差值进行调节,最终得到能量均分控制策略的调制修正量。
(3)不平衡环流控制。考虑到SPH-MMC的内部环流会引起暂态过程的不平衡和扰动,可首先通过陷波滤波器去除桥臂间环流ijz中的二次基频分量,得到二次环流ijz2,然后将二次环流与参考值的差值发送到比例谐振控制器进行跟踪处理,得到所需的参考电压补偿信号*CV,从而有效抑制环流中的二次基频分量。
最后,利用瞬态直接电流控制使变流器端口电流icα、icβ跟踪指令值iref_cα、iref_cβ,并从输出中减去环流抑制器的输出,形成背靠背变流器两侧的相端口参考电压uref_αo、uref_βo。然后用最近电平调制和脉宽调制相结合的混合调制法得到Np_on、Nn_on,改进型NL-PWM工作于PWM模式的子模块采用单极倍频调制,阶梯波电压与PWM波电压相加,即可得到各模块的触发脉冲。在此基础上对PHM- MMC各桥臂子模块的投入与切除进行控制,最终实现了补偿目标的可控性。
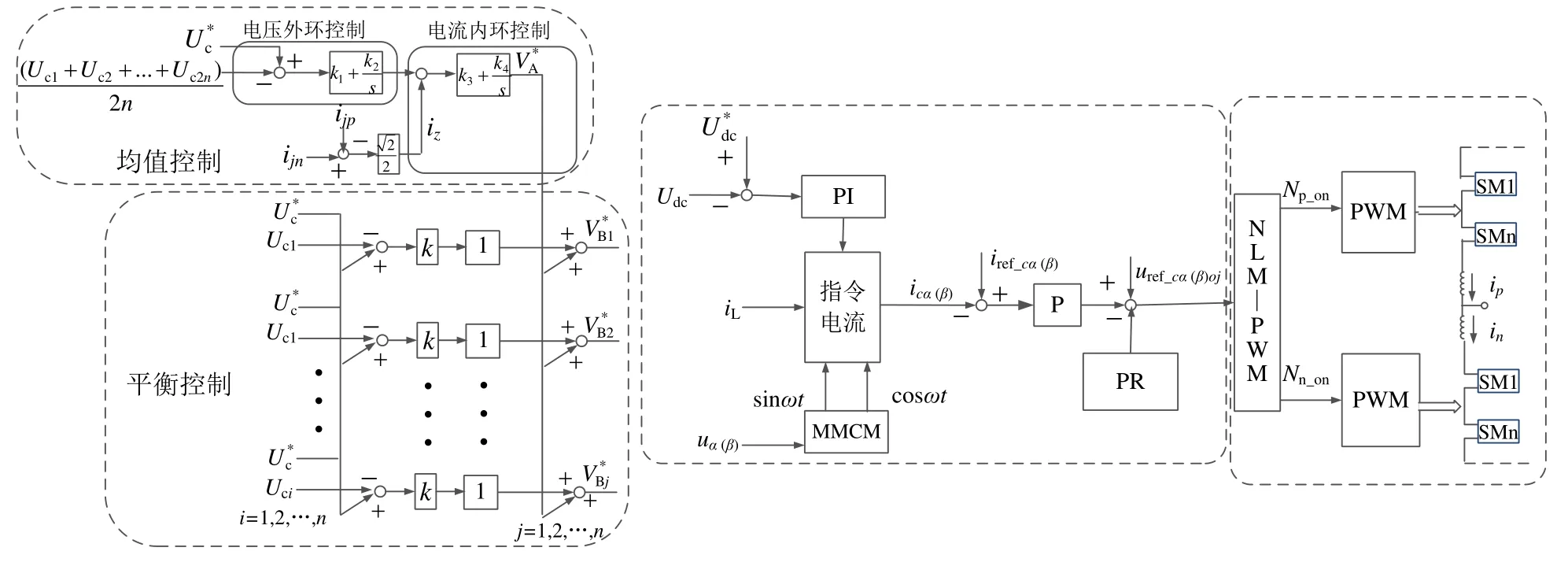
图2 SPH-MMC综合潮流控制器控制策略模型
3 仿真验证
为了验证新方案的工作特性,利用Matlab/ Simulink进行仿真,建立3种连续工况来反映牵引负荷的波动性和非线性,仿真参数如表1所示。
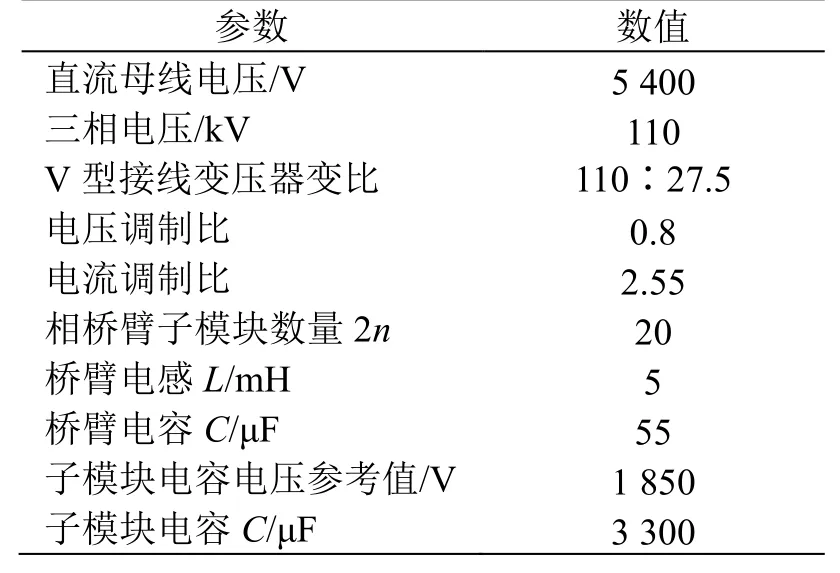
表1 仿真参数
建立3种工况:工况1,牵引负荷的视在功率设置为5 MV·A,补偿前的功率因数为0.85;工况2,牵引负荷视在功率设置为20 MV·A,补偿前功率因数为0.90;工况3,牵引负荷视在功率设置为30 MV·A,补偿前功率因数为0.95。图3和图4为上述3种工况对应的牵引负荷电流有效值及有功和无功功率的变化情况。

图3 负载电流
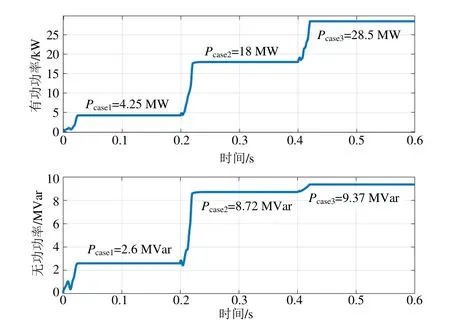
图4 牵引负荷有功功率和无功功率
完全补偿和部分补偿的电网侧三相电压、电流如图5所示。可以看出,设定不同的补偿目标后,系统仍然可以得到预期结果。特别是在图5(b)和图5(d)中,当实际不平衡比优于目标值时,系统可以选择不补偿负序电流,同时,完全补偿和半补偿的电网侧三相电流在0.2 s处和0.4 s处发生改变,对应3种工况下牵引负荷及补偿目标的切换,验证了补偿目标的可控性。
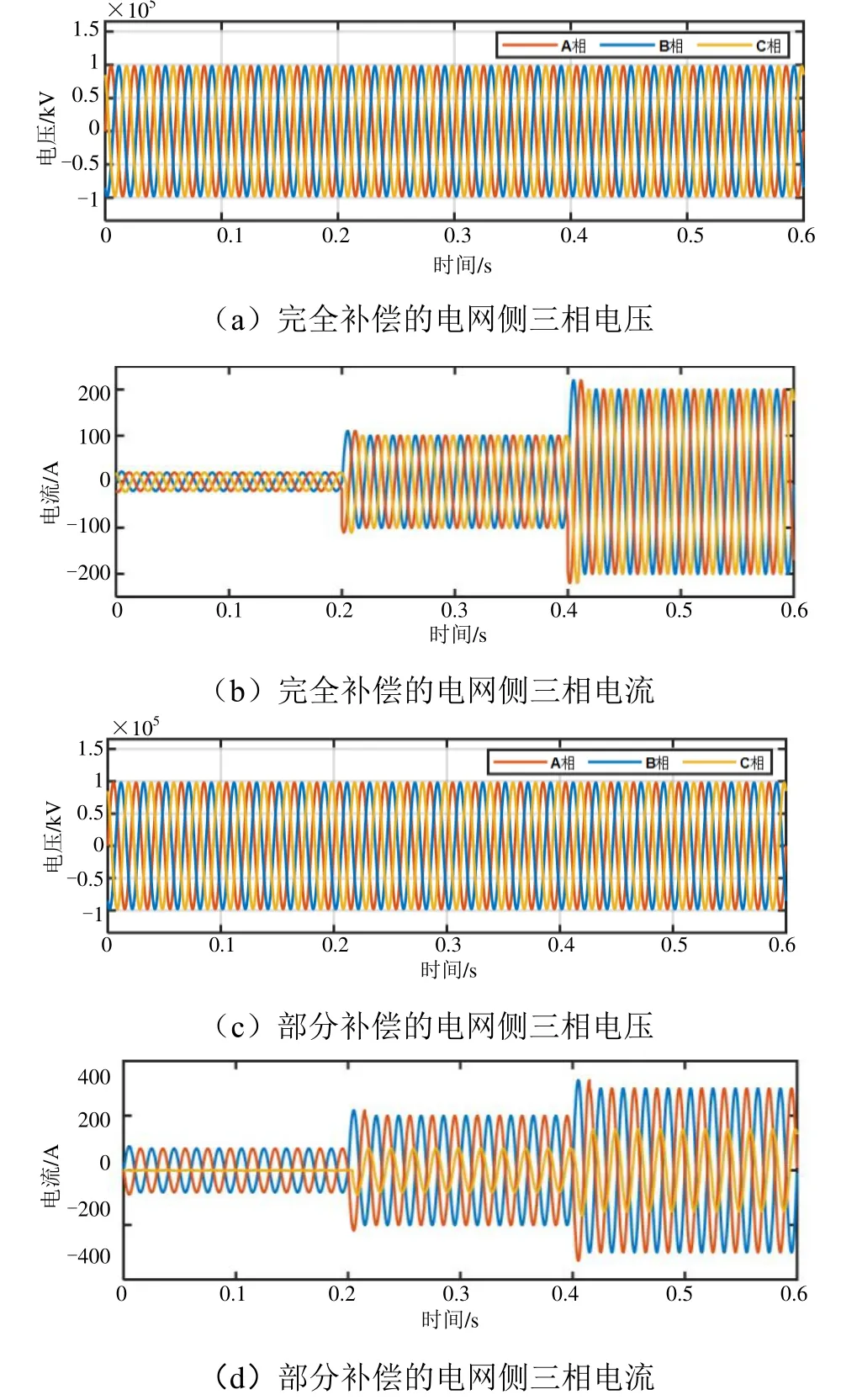
图5 补偿后电网侧三相电压电流
图6所示为部分仿真波形。图6(a)中,SPH- MMC直流侧电压在额定值5 400 V时基本稳定,波动幅度约为0.92%。图6(b)中,无论负载如何变化,子模块电容电压始终保持稳定,波动幅度稳定在2%以内,即稳定在1 813~1 887 V范围内,说明了所采取的电容电压控制策略的有效性。如图6(c)所示,桥臂间二倍频环流以及高频环流在开启环流控制器以后明显得到抑制,同时桥臂电流的畸变也很小,表明了该控制策略的有效性。由图6(d)一次侧三相电流谐波分析结果可知,iA、iB、iC的THD值分别为1.02%、1.12%和1.14%,畸变率在3%以内,满足国家电能质量控制标准的要求,其高次谐波主要集中在3倍基频和整数倍附近。

图6 部分仿真波形
4 结语
本文提出了一种基于SPH-MMC的新型同相牵引供电系统,该系统可以降低单相牵引负荷引起的三相不平衡度,提高功率因数,降低谐波含量,为高速列车提供持续动力。建立了新型同相牵引供电系统的数学模型,该模型彻底取消了牵引变电所出口处的电分相,实现了同相供电。推导了基于SPH-MMC的UPFC补偿电流,分析了其环流特性,基于PI控制器的环流抑制结合NL-PWM,很好地抑制了桥臂环流。提出了一种分层控制策略,仿真结果显示,直流母线电压以及SPH-MMC子模块电容的电压始终保持稳定,在3种工况下均具有良好的动态性能,证明了控制策略的有效性和正确性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
防爆电机(2022年3期)2022-06-17
粮食问题研究(2022年2期)2022-04-25
科学导报·科学工程与电力(2019年5期)2019-10-20
电机与控制学报(2018年9期)2018-05-14
山东工业技术(2018年2期)2018-03-20
大陆桥视野·下(2016年9期)2017-05-08
儿童故事画报·智力大王(2016年6期)2016-09-14
科技与创新(2016年5期)2016-03-17