
高速某动车牵引控制系统的研究与仿真
2022-06-30 00:59孙华陈敬宋伟伟崔浪
科海故事博览·中旬刊 2022年6期
关键词:高速动车组
孙华 陈敬 宋伟伟 崔浪


摘 要 针对高速动车组列车,时速不低于250公里,关键组成部分牵引传动系统关系着整车动车的数据传输效率以及安全性,本研究对牵引传动系统进行了详细的建模,分析系统中整流环节以及逆变环节两部分控制的数学方程,再根据机车实际的运行工况以及数学方程之间的关系,选取合理控制策略,结合电机实际参数有效提高数据传输效率,平滑电机调速控制;并利用模拟仿真环境对其进行整体模拟测试,验证所用算法的可行性以及正确性,此后在半实物仿真平台中实现算法,进一步验证算法的可实施性与正确性。
关键词 高速动车组 牵引传动 逆变 异步电机
中图分类号:U266 文献标识码:A 文章编号:1007-0745(2022)06-0004-03
国内高速铁路快速发展,科研不断进步,电力机车的关键技术在国内已基本实现自主化生产研发,但是作为整车控制的核心——牵引传动控制系统,我国目前的水平尚未达到世界先进水平,研究牵引控制的牵引特性进一步完善工作仍然至关重要[1]。牵引传动系统对电力机车运行的控制、监测、保护、通信等功能还需进一步的深入研究以及优化[2]。此论文旨在开发牵引控制单元平台以及控制系统,在此平台上对整车牵引模块单元的控制、监测、通信等功能进行开发和测试验证。为了实现对动车组有效性和安全性的控制优化,进一步实现对动车组的高水平自主化研究,我国已有很多学者展开了深入的研究与实践。学习已有的算法以及实现过程,分析目前某车型牵引控制系统的运行性能,参考对应电机功率特性,本文从电力传动系统的整流控制、逆变控制的基本原理作为出发点,在允许的试验环境中利用半实物模拟车辆的控制平台,对牵引的整流逆变控制进行设计与验证,并对实验结果进行分析。
1 牵引传动系统建模
某车型动车组牵引控制系统采用交流、直流、交流的电传动方式,在运行系统中包括受电弓、高速断路器、整流器、直流环节、逆变器和交流牵引电机等关键设备[3]。本文描述的该车型动车组的牵引传动系统的主要结构图如图1所示。
受电弓从电网接到25000V的高压交流电,高压运输不安全、非常危险,需将其经过变压器进行降压处理之后,输送到整流环节进行整流处理,整流环节实现交流到直流的转变,将其整流,得到可控的直流电压,再经过中间直流环节电路,此时输出的是直流电,后续逆变环节电路再将该直流电进行转化,转化为交流电,输送到控制异步牵引电机,从而实现电机的可调速变频控制的目的,该系统的整流器由两组构成,且均为四象限整流。
2 四象限整流
在实现控制平台搭建中,为简化分析与建模,两台四象限整流器的控制策略以及输入输出的情况在此认为完全一致。
2.1 状态方程
结合系统实现功能,设计牵引传动系统中的整流控制部分电路,其主电路如图2所示,该框图较为经典,采用双桥IGBT控制策略。在机车运行中,整流环节从受电弓接收25000V的高压,并将该高压经过变压器降压控制后进行整流控制转换为直流电,降压之后的直流电,危险性降低,经过中间直流环节输送给逆变控制,可以安全地对电机进行控制。在此过程中,四象限变频器的整流器采用IGBT整流器,一方面可以调整输入的功率因数,另一方面可以将能量进行反馈,电能由直流侧回馈到电网侧,实现绿色节能。设计的算法利用率高,平稳且可控。[4]
在图2中:
1.us为电网侧电压。
2.S1a、S2a、S1b、S2b是整流系统的四个IGBT整流器。
3.L2、C2、Cd构成系统中间直流环节。
4.LN、RN为自感和电阻。
2.2 控制策略
整流器控制电路设计完成后,依据数学模型设计该系统的控制策略,控制采用双闭环控制,即电压电流双闭环控制,为了平稳可控电机以及功率因数为1的目标,系统的电压电流控制中电流环、电压环分别采用PR控制策略和PI前馈控制策略,并使用SPWM调制技术来实现发波控制。依据控制策略搭建模型,进行初步调试,调整各个控制参数,使得输出波形趋于正常。
2.3 输出波形
实现系统的算法设计,并且在仿真环境下中进行模拟测试,搭建高速电力机车仿真模型,设置仿真参数的起始值,变压器前端输入电压为25000V,此时仅仅是变压以及整流,相位并不发生变化,经过模拟输出,发现畸变率小于2.5%,该值较小,说明电网处于相对理想状态,利用率相对较高;模拟测试中给定输出电压为2680V,在测试完毕时,输出结果与给定值接近。
2.4 半实物仿真平台验证
在仿真平台中实现以上算法后,分析修改并在DSP处理器芯片中写入相应的控制算法,经过半实物仿真,结合SIMULINK搭建该车型的控制平台电路,高压侧电流与电压此时的相位差值几乎为零,调制发波信号占空比根据控制信号给定有规律变化,输出的中间直流电压在给定电压上下波动,说明该整流控制策略可以达到控制的目的。
3 逆变系统
3.1 电路状态
在车辆控制中,电机的运行性能是整车的控制关键,且是调速的关键,逆变模块作为实现牵引控制电机变频调速的控制核心尤为重要,系统的逆变控制主电路如图3所示。
由图3可知:
1.逆变器主电路U、V和W三相桥臂组成。
2.每相桥臂包含2个电力电子开关器件IGBT。
3.每个IGBT与1个二极管反向并联。
3.2 矢量控制
在本文中,逆变控制环节采用矢量控制。矢量控制是将磁链与转矩解耦,分别对磁链和转矩进行控制的思想,从而可以实现双向控制电机,使得电机运行更加平稳。在该系统中逆变控制采用电流环、速度环双环闭环控制的思路,外环为转速、电流为内环。调制算法采用SVPWM技术。为了对电机实现全速域的控制,发波方式采用同步、异步混合SVPWM调制算法。
3.3 输出波形
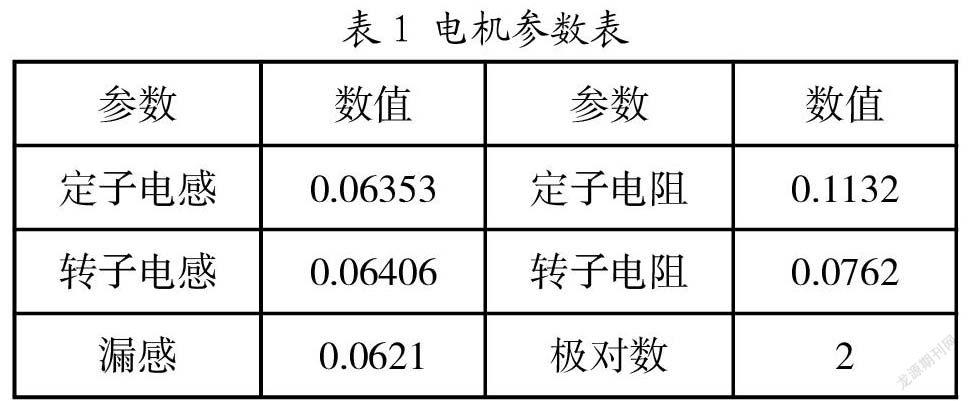
逆变模块电路电机参数如表1所示。间接磁场定向控制时,电流为额定电流的1.1-1.3倍,此时输出的电流与算法设计中的频率变化比较一致,而且上升趋势较为缓慢;磁链的输出图形为椭圆形,比较输出电流和电压,波动相对小;输出转矩与给定一致,并且按照电机给定的恒转矩-恒功率控制方式变化。
4 结论
本文针对某车型动车组进行整流、逆变控制原理分析,并在仿真环境中实现并分析结果,后续根据牵引控制算法实现设计,又分别在牵引控制单元硬件平台——整流和逆变板卡的DSP和FPGA中实现所设计算法功能,在半实物仿真平台中进行验证,输出结果显示:牵引控制单元硬件平台输出给半实物仿真平台的PWM分别为整流板卡输出的SPWM波形和逆变板卡输出的SVPWM波形,修改实际的电机参数,并进行试验,在牵引工况、移车工况、试验工况以及制动工况下,系统的输出扭矩按照给定扭矩进行跟随闭环控制,系统的输出电流跟随车工况模式的变化而变化,PWM波形控制较好。通过试验结果可以判断,该算法可以实现较好的电机控制。
参考文献:
[1] 武彦.CRH2型动车组牵引传动控制系统仿真研究[J].电脑知识与技术,2015,11(18):192-194,202.
[2] 李林,徐海,耿路,等.动车组牵引传动系统瞬态电流控制策略对电网冲击的影响研究[J].南京师范大学学报(工程技术版),2017,17(02):1-12.
[3] 劉长清,郭平华,黄长强,等.电力机车四象限辅助变流器的研制[J].电力机车与城轨车辆,2003(06):18-20.
[4] 崔恒斌,马志文,韩坤,等.电动车组牵引传动系统的实时仿真研究[J].中国铁道科学,2011(06):96-103.CD2F8B27-83E8-48A9-AF71-41A742A552CD
猜你喜欢
中国管理信息化(2017年10期)2017-06-08
中国科技纵横(2016年22期)2017-05-27
中国科技纵横(2016年22期)2017-05-27
山东工业技术(2016年24期)2017-01-12
山东工业技术(2016年24期)2017-01-12
山东工业技术(2016年24期)2017-01-12
中国高新技术企业(2016年33期)2016-12-27
科技视界(2016年12期)2016-05-25
中国高新技术企业(2015年33期)2015-09-01
中国高新技术企业(2015年18期)2015-05-20
