基于扩张状态观测器补偿的Boost变换器无源控制
2022-06-29 11:45李史玉李建国张雅静王久和
电力系统及其自动化学报 2022年6期
李史玉,李建国,张雅静,王久和
(北京信息科技大学自动化学院,北京 100192)
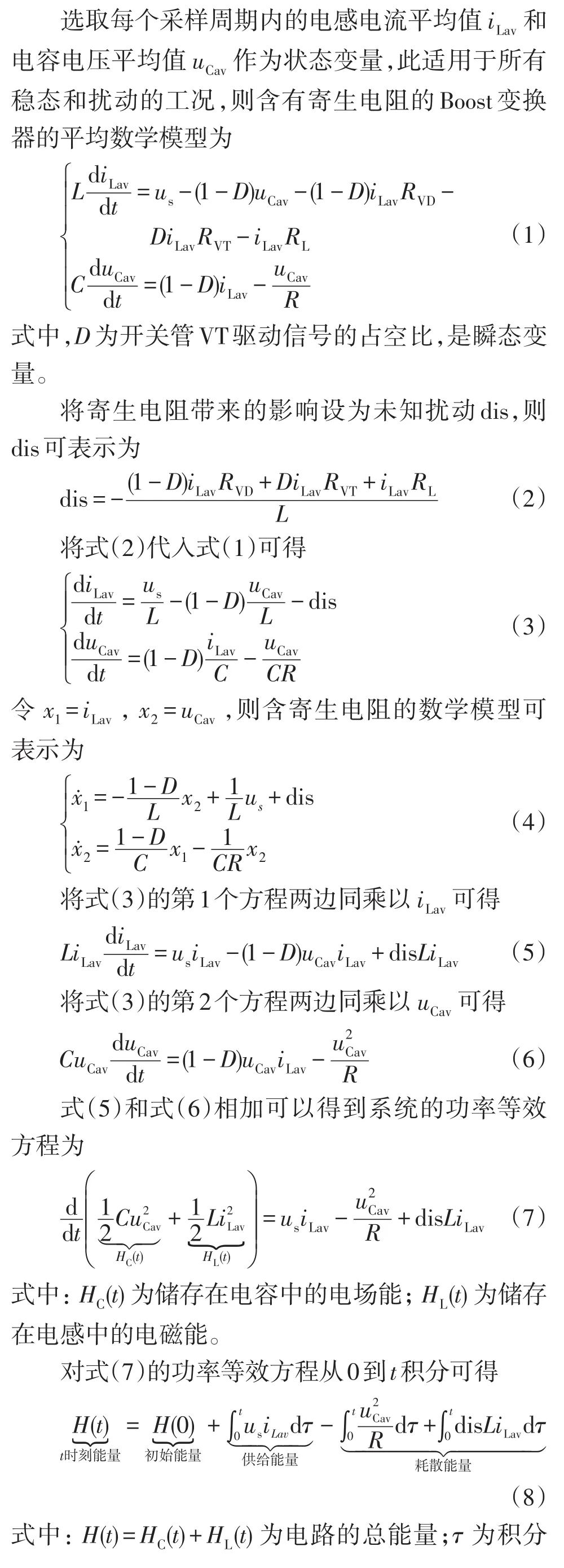
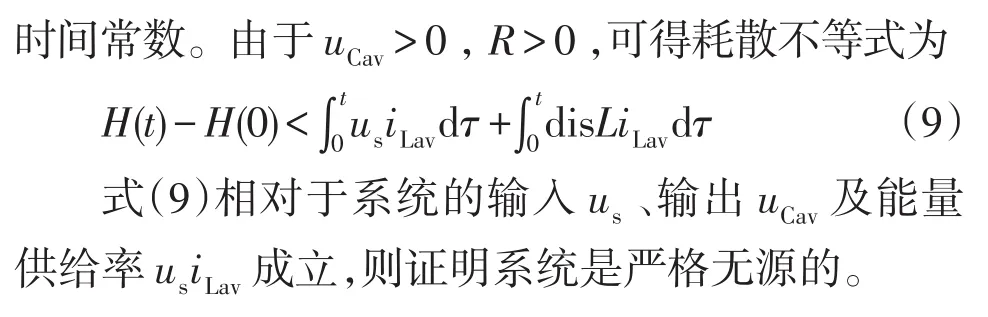
为实现以“碳达峰、碳中和”为目标的能源结构转型,新能源电动汽车、超级不间断电源系统、通信基站,以及大型数据中心等分布式电源系统对变换器整体装置的性能和稳定性提出了更为严苛的要求。在器件和拓扑结构一定的情况下,急需从控制策略角度提出改进系统性能的方法。
Boost变换器由于拓扑结构简单、性能稳定,被广泛应用于通信电源[1]、光伏系统、储能系统[2]等领域。传统Boost变换器通常采用比例积分PI(pro⁃portional integral)控制方法,由于传统的PI控制是基于线性模型,大信号扰动工况系统动态性能差,难以保持系统稳定;而Boost变换器是非线性系统,将线性控制策略应用于非线性系统中存在局限性。国内外学者对非线性控制策略进行了大量的研究,并开始应用在电力电子变换器中,以提升系统动态性能。其中,滑模控制SMC(sliding mode control)以结构简单、鲁棒性强得到广泛应用,但由于其本身控制律的离散特性,容易产生抖动,影响控制精度[3-4]。状态反馈线性化通过适当变换,将非线性问题转化成线性问题,但要求系统模型非常精确,设计的控制律较为复杂,不利于工程实现[5]。文献[6]通过设计电路参数或控制器参数来满足无源性稳定判据,从而保证系统稳定性,但本质上仍然是线性控制。
无源控制PBC(passivity-based control)作为非线性控制策略的一种,其本质是一种能量控制,可实现系统的全局稳定,动态性能良好,已经应用到许多领域[7]。文献[8-10]分别通过对Boost变换器、单相PWM电压源变换器、Cuk变换器进行PBC控制,从而实现输出的稳定。
在寄生电阻或其他未知扰动的影响下,最终的电压输出会存在稳态误差[11]。如何消除Boost变换器受到未知扰动产生的稳态误差,是Boost变换器无源控制需要解决的问题[12]。目前,常用的解决方案是在无源控制的基础上增加外环控制来消除误差。文献[13]对于储能变换器,电流内环采用无源控制,电压外环采用滑模控制,来补偿内环电流精度;文献[14]在无源控制基础上,外环引入PI控制器来消除静态误差。双环控制增大了系统结构的复杂程度。扩张状态观测器ESO(extended state ob⁃server)可以在系统信息较少的情况下对扰动进行动态估计与反馈补偿[15-16],从而确保系统稳定,提高系统的鲁棒性和抗干扰能力[17-19]。
针对Boost变换器受到未知扰动时存在稳态误差的问题,本文提出一种基于扩张状态观测器的无源控制策略。首先,对Boost变换器建立欧拉-拉格朗日EL(Euler-Lagrange)模型,采用阻尼注入的方法设计了无源控制器,并进行参数整定。然后,基于扩张状态观测器来对未知扰动进行观测和补偿,以消除系统稳态误差。最后,搭建基于扩张状态观测器补偿的无源控制仿真模型,仿真结果表明,本文所提控制策略可以补偿系统因未知扰动造成的稳态误差,提高系统的动态性能。
1 数学模型与无源控制器
1.1 数学模型与无源性分析
寄生电阻广泛存在于开关、电感等元件中,含有寄生电阻的Boost变换器电路如图1所示。其中,us为直流电源输入电压;L为电感器电感;VT为开关管;VD为二极管;C为电容器电容;R为负载;iL为流过电感器L的电流;uC为电容器两端电压;RL、RVT、RVD分别为电感器、开关管VT、二极管VD的寄生电阻。

图1 含有寄生电阻的Boost变换器电路Fig.1 Boost converter circuit with parasitic resistance
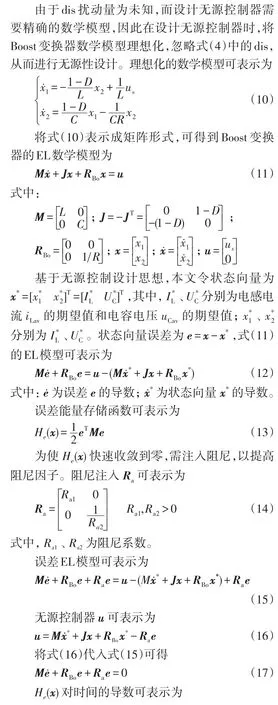
1.2 无源控制器设计
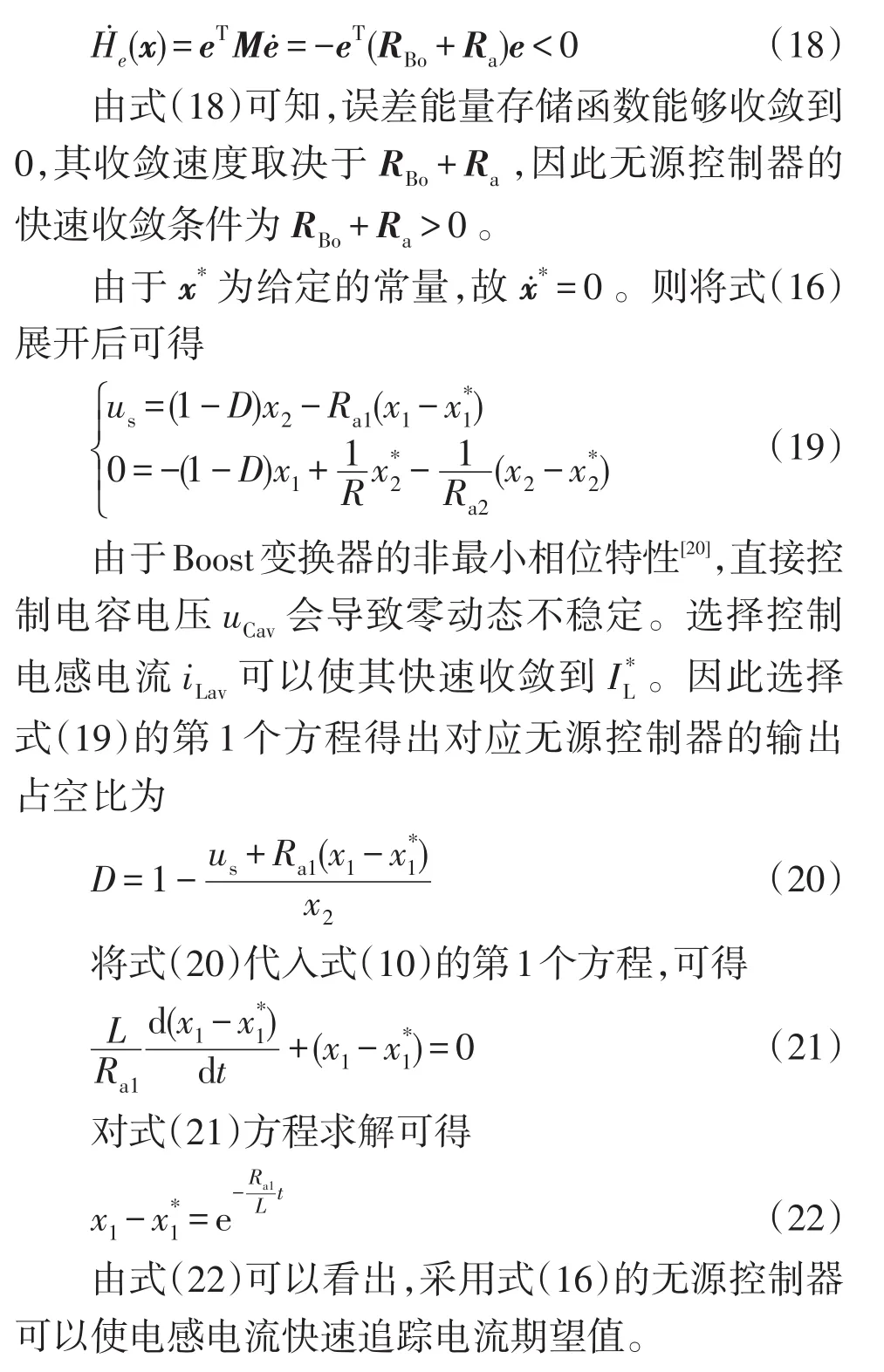
1.3 无源控制器参数选取
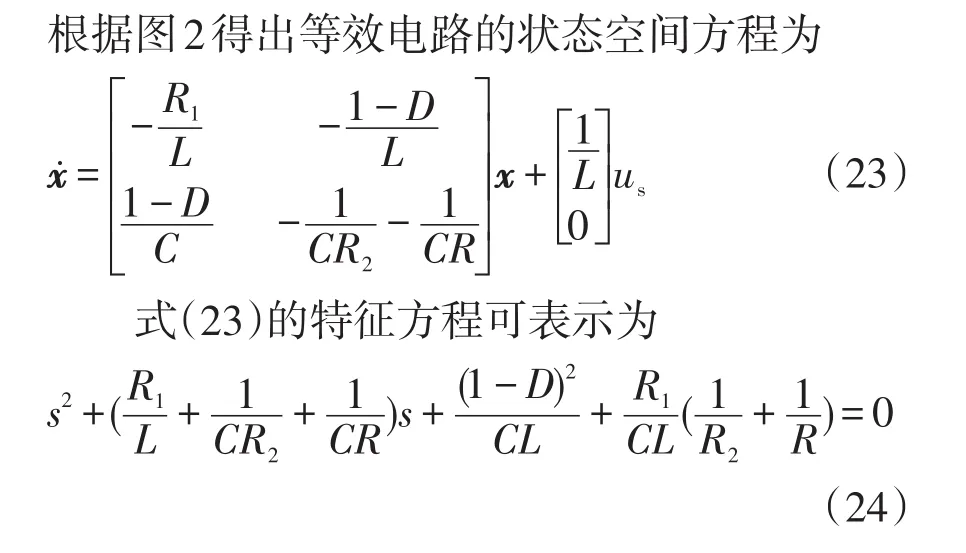
由式(18)可以看出,电感存储能量与Ra1有关,电容存储能量与Ra2有关。为了选择阻尼注入Ra的值,建立图2所示的Boost变换器等效电路。图2中,R1为电感器串联电阻;R2为电容器串联电阻。

图2 无源控制下的Boost变换器等效电路Fig.2 Equivalent circuit of Boost converter under PBC

分别取阻尼比ξ为 0.1、0.5、1.0、1.5、2.0,此时闭环系统在单位阶跃信号作用下的输出电压响应如图3所示。由图3可以看出,当0<ξ<1即系统处于欠阻尼状态时,系统的瞬态响应呈现幅值按指数规律衰减的正弦振荡曲线;当ξ=1或ξ>1即系统处于临界阻尼或者过阻尼状态时,系统的瞬态响应呈现为一条单调上升的指数曲线,没有振荡发生,因此无源系统更稳定。此时

图3 系统的单位阶跃响应曲线Fig.3 Unit step response curve of system

结合L、C参数,本文选择Ra1=5。
图4为系统在不同阻尼比时对应的伯德图,由图4可以看出,曲线阻尼比从左到右依次增大,对应的相位裕量均大于零,并且逐次增大。

图4 引入虚拟阻尼Boost变换器的伯德图Fig.4 Bode diagram of Boost converter with virtual damping
2 扩张状态观测器设计与参数选取
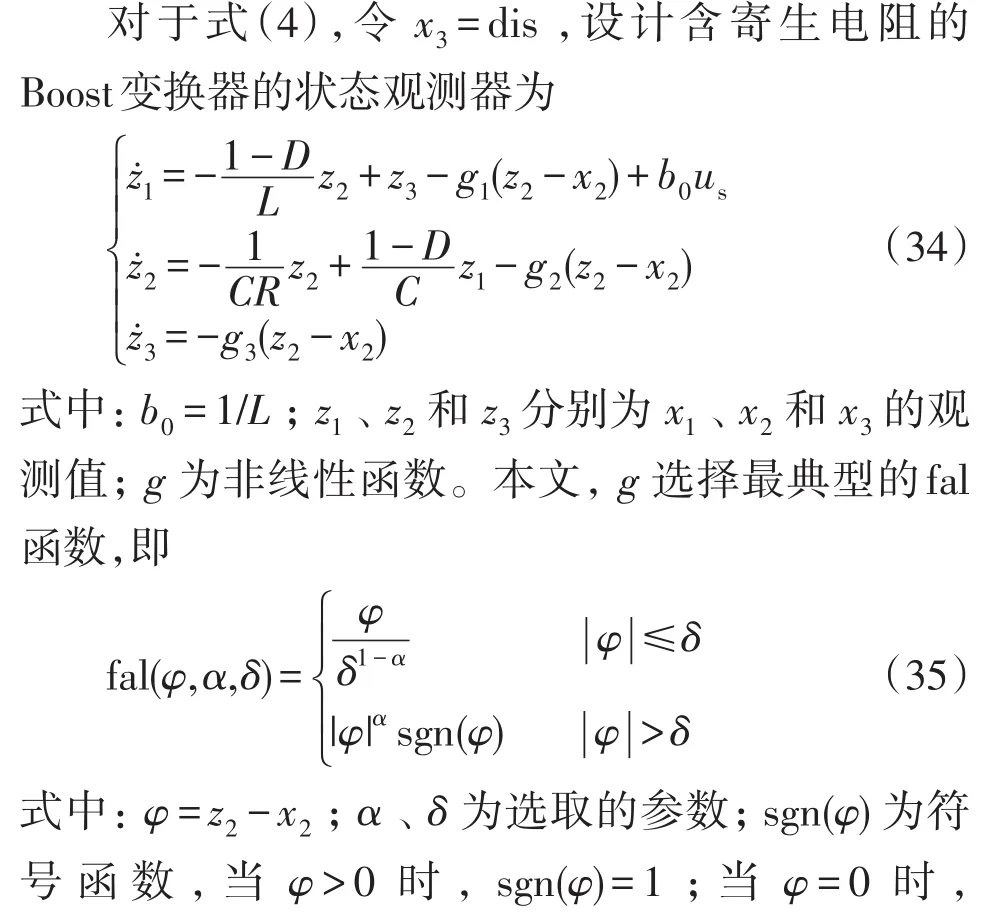
2.1 扩张状态观测器设计
本文利用ESO对扰动项dis进行估计,将观测得到的未知扰动在系统输入端进行补偿,进而消除寄生电阻对系统带来的影响。
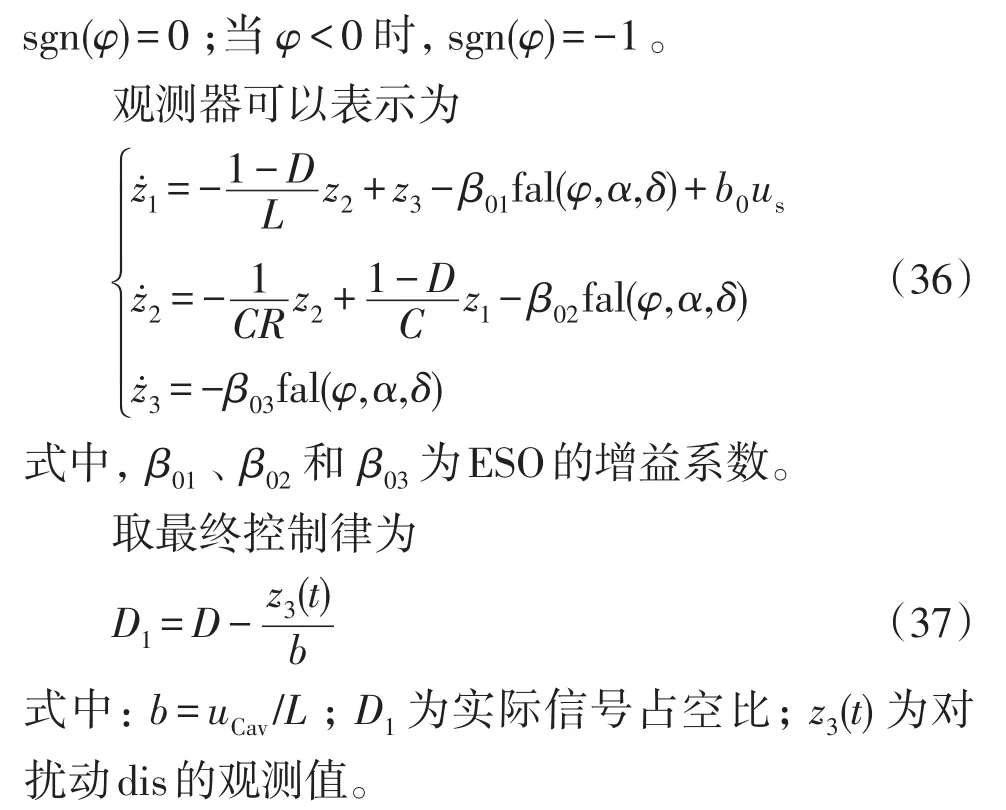
将理想占空比减去扰动对应的占空比即在输入端对扰动进行了补偿,得到最终控制量来消除寄生电阻对变换器造成的影响。系统控制框图如图5所示,由图5可知,无源控制器以us、iLav、uCav、和为输入信号,利用ESO对扰动进行补偿,经过简单的运算后输出实际占空比,通过PWM发生器,产生PWM波,驱动开关管来达到控制的目的。

图5 系统控制框图Fig.5 Control block diagram of system
2.2 扩张状态观测器参数选取
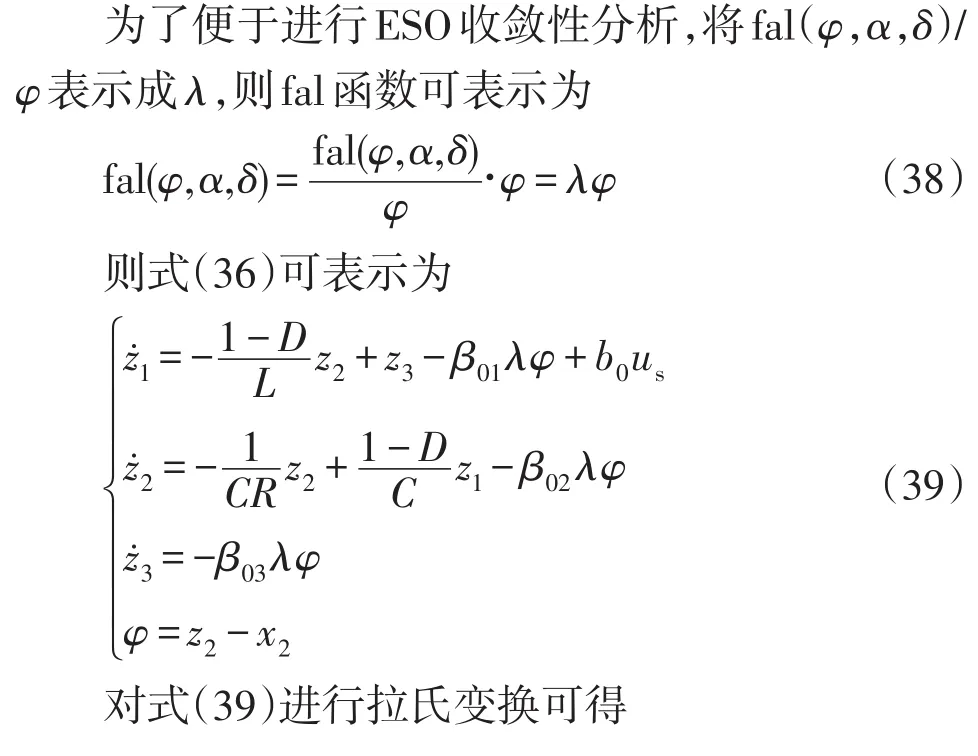
通常,增大β01可以加快系统的响应速度,缩短过渡时间;增大β02可以抑制超调量;增大β03可以加快误差追踪速度。对于fal函数中的参数α与δ来说,α一般取值为0~1之间的常数。α减小,跟踪速度变快,滤波效果变差;δ增大,滤波效果变好,跟踪速度变慢。依据稳定约束条件和参数整定的原则,选取相关参数如表1所示。
表1 ESO参数Tab.1 ESO parameters
3 仿真结果
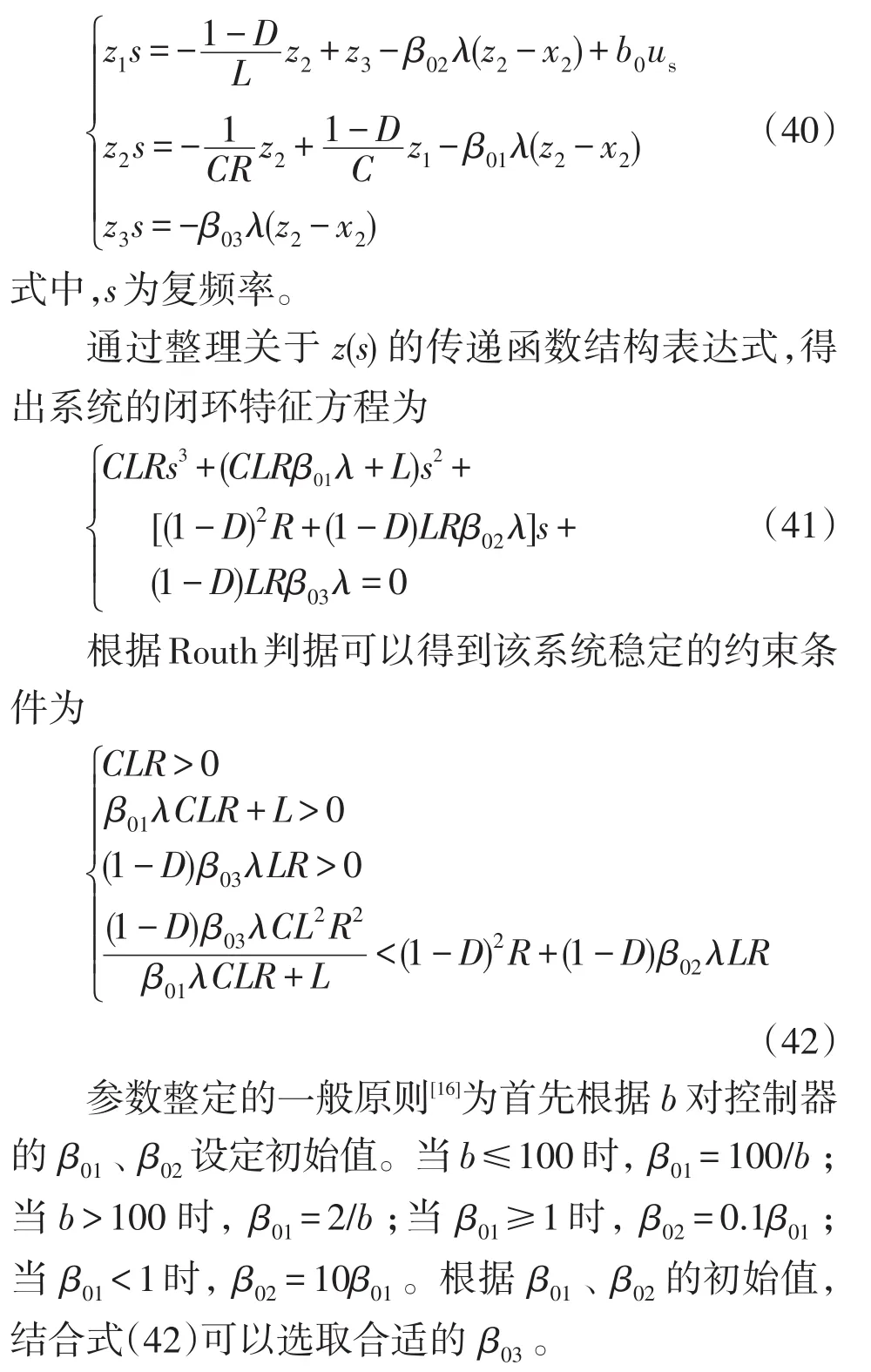
本文基于PSIM仿真软件对所提出的Boost变换器的控制策略进行仿真验证。电路仿真参数如表2所示。
表2 变换器参数Tab.2 Converter parameters
3.1 未知扰动仿真
将系统内部寄生电阻和输出负载的变化作为未知扰动,图6为未知扰动下输出电压波形。图6(a)为改变RL后输出电压的波形,图6(b)为其局部放大图。在1 s时,RL由216 mΩ减小为200 mΩ,由图6(a)和(b)可以看出,输出电压在0.09 s时达到稳态,稳定之后输出电压达到期望值200 V,稳态纹波为0.128 V;ESO可以补偿由寄生内阻带来的稳态误差,改变寄生电阻后,输出电压波形没有明显变化,仍然可以达到期望值。图6(c)为改变R后输出电压的波形,图6(d)为其局部放大图。在1 s时,R由80 Ω增大为100 Ω,此时功率由500 W减小为400 W,保持200 V不变。由图6(c)和(d)可以看出,输出电压在0.09 s达到稳态,在改变输出负载后,输出电压有较小波动,电压变化幅度为0.122 V;稳定之后又达到期望值200 V,稳态纹波为0.106 V,从而验证ESO可以有效抑制未知扰动。
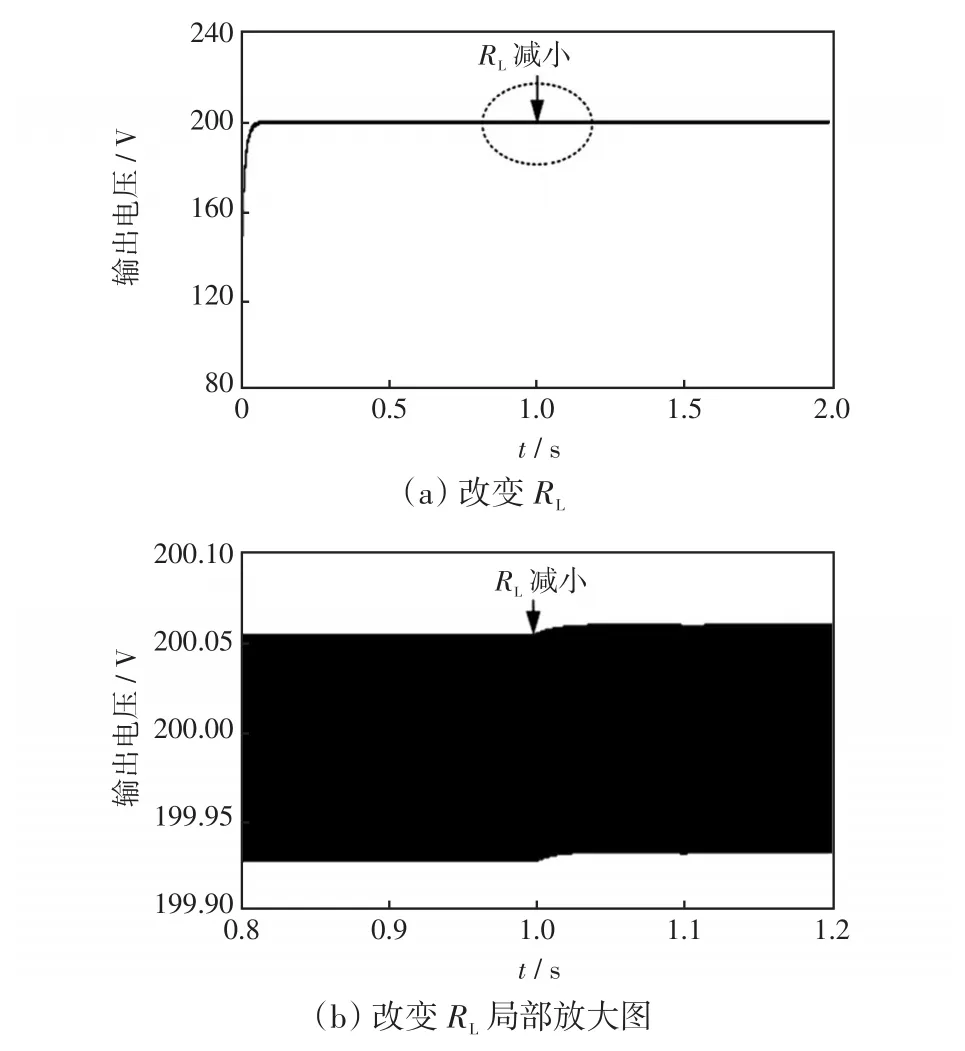
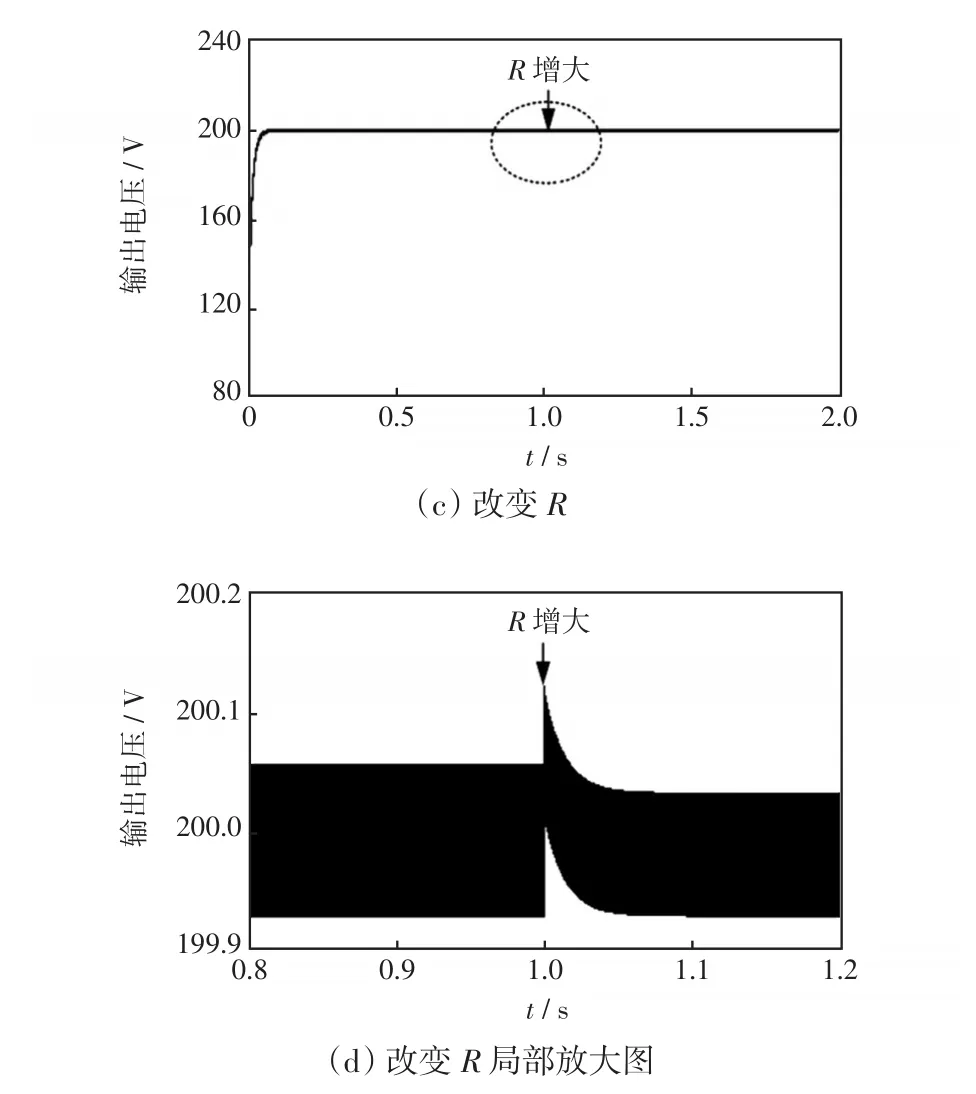
图6 未知扰动下的输出电压Fig.6 Output voltage under unknown disturbance
3.2 动态性能仿真
通过改变系统输入输出电压期望值,可以得出系统对设定值跟踪的动态性能表现,图7为系统动态跟踪性能波形图。图7(a)为改变us的输出电压波形,图7(b)为其局部放大图。在1 s时,输入电压由100 V增加到105 V,保持功率500 W不变,I*L由5 A减小为4.762 A,U*C保持200 V。由图7(a)和(b)可以看出,输出电压在0.09 s达到稳态;改变输入电压,输出电压有较小波动,电压变化幅度为0.073 V,稳定后达到200 V,稳态纹波为0.126 V。图7(c)为由200 V减小为160 V的输出电压波形,图7(d)为其局部放大图。由图7(c)和(d)可以看出,输出电压在0.09 s达到200 V并稳定;当1 s时减小,输出电压经0.06 s后恢复稳态达到160 V,稳态纹波为0.080 V。输出电压的动态响应速度较快,没有超调,稳态时也没有稳态误差。
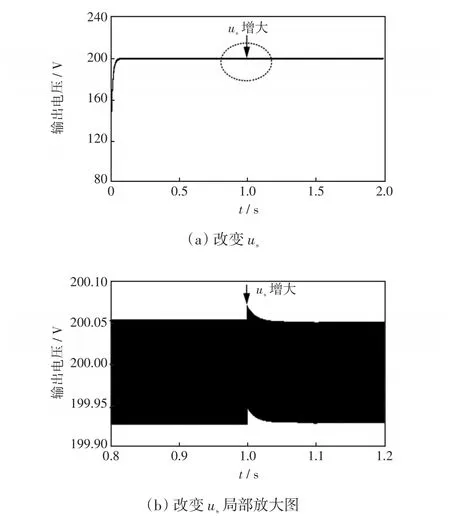
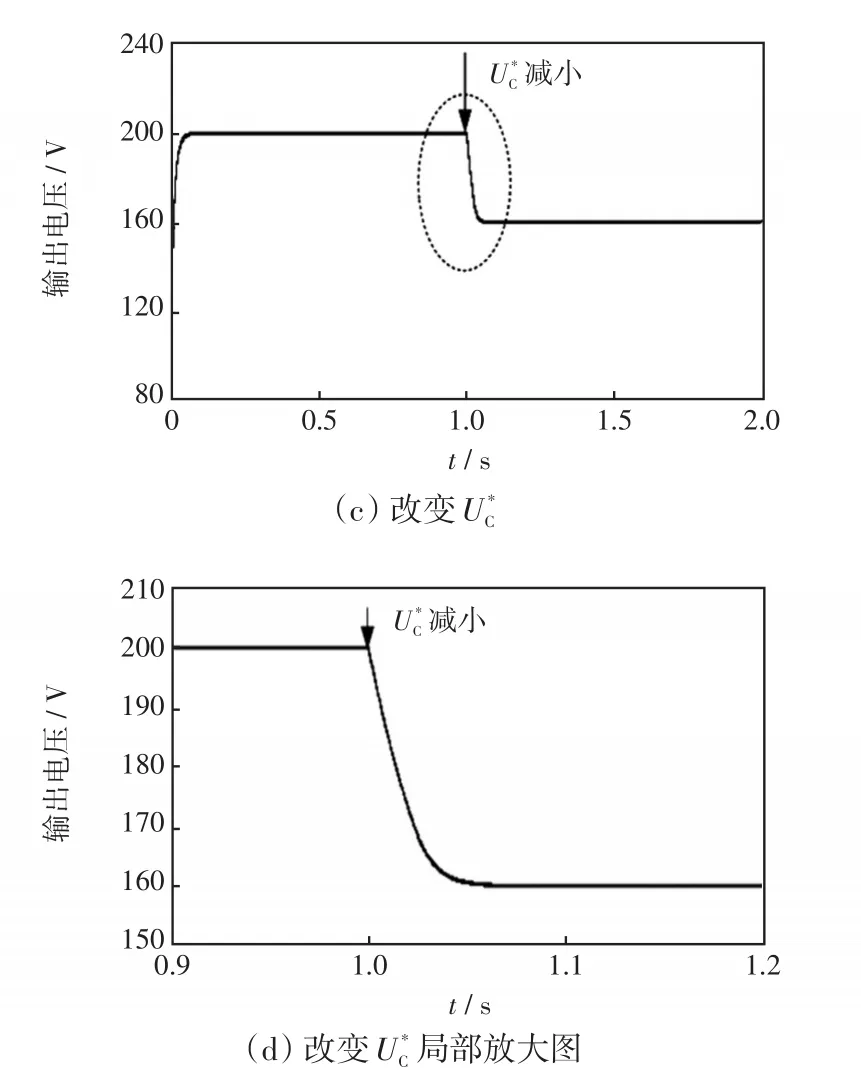
图7 动态跟踪性能波形Fig.7 Waveforms of dynamic tracking performance
3.3 多种控制策略仿真
将PBC+ESO控制、PBC控制、PI控制3种控制策略同时进行仿真比较。图8(a)为3种控制策略下输出电压波形,图8(b)和(c)为其局部放大图。在1 s时,将由200 V减小到180 V,功率由500 W减小为405 W,由5 A减小至4.05 A。表3为不同控制策略下输出电压性能指标。其中,ess1、ess2分别为在改变前、后的稳态误差;δ为在改变后的超调量;tr1、tr2分别为启动瞬间和改变瞬间到达稳态的时间。由图8及表3可以看出,PBC+ESO控制相比于PBC控制有效抑制了由寄生电阻产生的稳态误差。同时与PI控制相比可获得更好的动态性能。
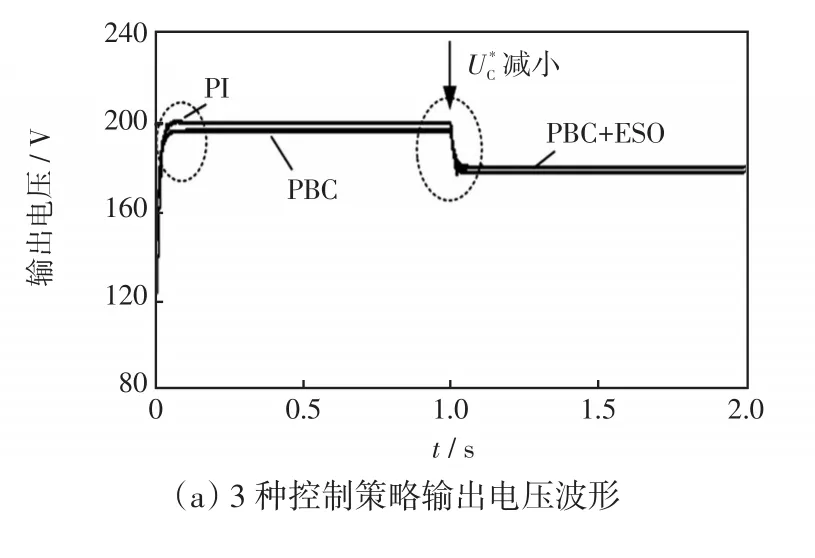
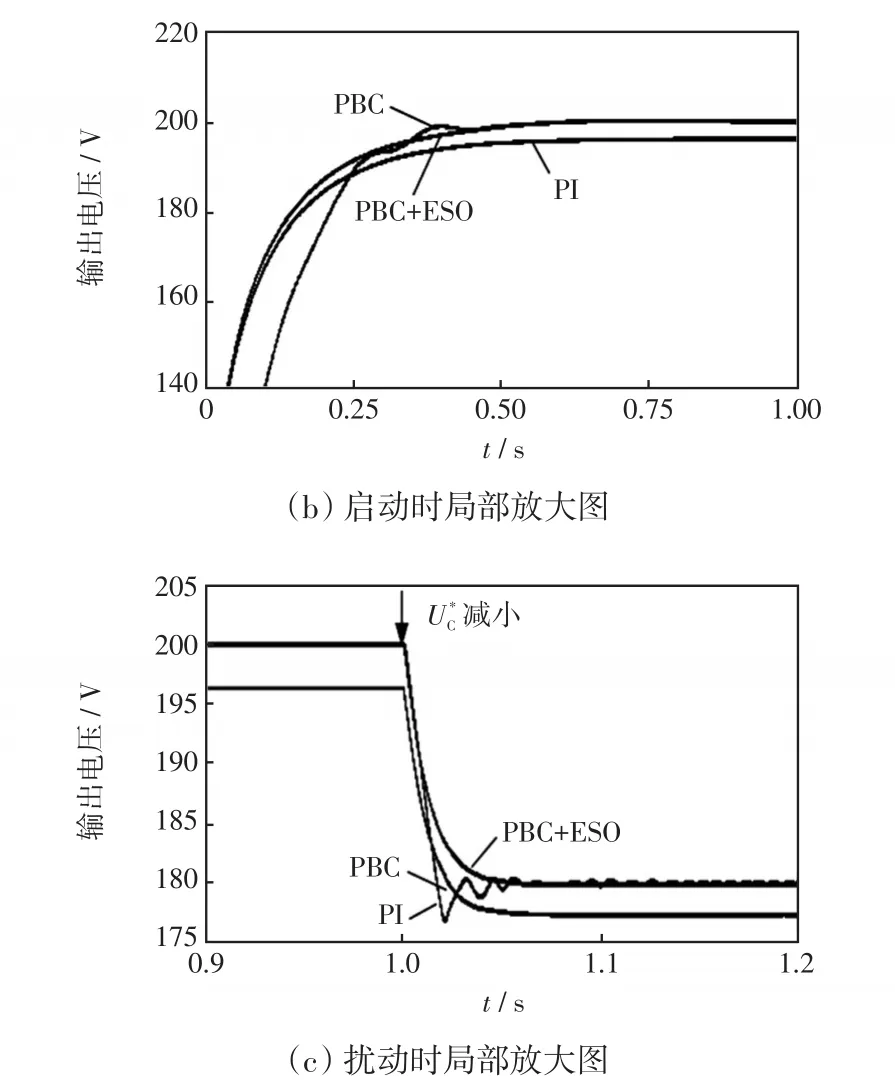
图8 输出电压波形Fig.8 Waveforms of output voltage

表3 输出电压性能指标Tab.3 Performance indexes of output voltage
4 结语
本文建立了基于EL模型的Boost无源控制器,并针对系统的未知扰动,设计了扩张状态观测器。通过该扩张状态观测器,对无源控制在系统内部存在寄生参数或受到外部扰动的情况下出现的稳态误差进行补偿,提高了系统的动态性能和稳态性能。通过仿真结果证明本文所提控制策略可以获得较好的控制特性。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年3期)2020-07-24
中华戏曲(2020年1期)2020-02-12
电子制作(2019年12期)2019-07-16
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年6期)2017-11-23