
机械控制工程温度控制实验教学研究
2022-06-28 03:01彭宝营陈秀梅许博刘忠和贺绍亚
中国教育技术装备 2022年7期
彭宝营 陈秀梅 许博 刘忠和 贺绍亚
摘 要 机械控制工程是将机械与自动控制连接起来的桥梁课程,涉及环节较多,学生普遍难以理解。温度控制在工业中具有广泛应用,结合机械控制工程基本理论,以温度控制为例,在机械控制工程所涉及的系统传递函数辨识、时域分析、频率分析及PID控制等环节进行实践教学设计,对该课程的应用型教学进行探索。
关键词 机械控制工程;温度控制系统;实践教学;实验
中图分类号:G642.0 文献标识码:B
文章编号:1671-489X(2022)07-0144-04
0 引言
机械控制工程在工程类本科专业学生的知识体系中占有重要的地位,该课程将机械、电气、流体传动与自动控制等技术连接起来,是机电控制与自动化不可或缺的知识[1]。机械控制工程将控制理论和机械专业的理论知识与应用特点相结合,涉及复变函数、高等数学、机械原理、电工电子等学科,具有理论性强、内容抽象、内容涉及面广、实践性强等特点[2-3]。特别是该课程跟实际工程结合较难,学生普遍难以理解,最终造成一部分学生学习的主动性变差。随着智能控制及信息技术等新兴技术的发展,机械控制工程原有内容和教学方法与时代发展不相适应。由于实验设备缺乏,大部分学生毕业后无法在机械工程中有效应用机械控制工程的理论解决实际相关问题。
应用型本科人才核心能力的培养应注重工程实践能力的锻炼。针对机械控制工程课题,以实际工程实例为背景,开发实验装备,能激发学生主动学习的兴趣,缩短学生知识转化、应用的周期,让学生提前适应企业控制工程项目的实施,提高学生的动手能力,让学生逐步摆脱教师和课本的束缚,充分发挥自己的主观能动性[4]。温度控制在冶金、半导体、化工、建筑、塑料、制药、暖通空调、环保、农业栽培等行业中具有广泛的应用[5-7]。本文以温度控制系统为例,对机械控制工程涉及的多处理论进行实践型教学设计,对培养理论与实践相结合的应用型本科学生、提高教学质量进行初步探索。
1 温度控制教学实验平台构成
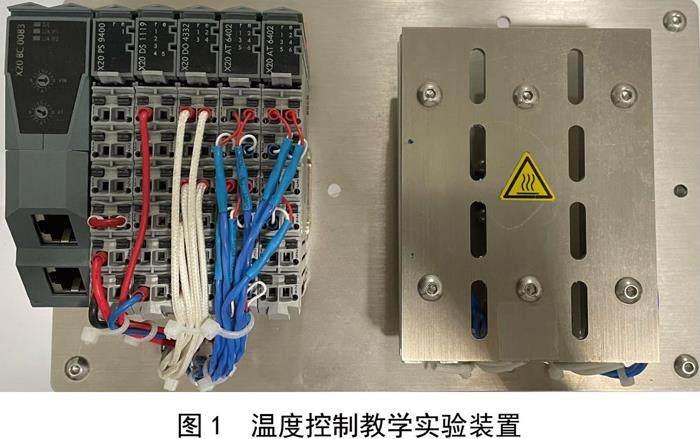
以机械控制工程中常见的温度控制系统为例,结合贝加莱(B&R)公司的Automation Studio控制系统及多温区固体机台[8],构建温度教学演示平台。机械控制工程温度控制教学演示平台硬件主要由温度控制结构和PLC控制器结构两部分组成,其中温度控制结构如图1所示,主要由贝加莱公司的X20系列的IO模块以及温度控制模型本体构成。X20BC0083为总线控制器,以POWERLINK协议通信的方式与PLC CPU控制器交互;X20DO4332是四通道数字量输出模块,单个通道输出电流为2 A,用于控制加热管的通断;X20AT6402模块连接温度传感器,对受热区域的温度进行实时采集。
温度的加热区域采用加热管进行加热,其尺寸为Φ3.8 mm×16 mm,额定功率为30 W,位于加热对象的正下方,直接与X20DO4332模块相连接,其结构如图2所示。温度传感器为K型热电偶,其工作范围为-20~200 ℃,直接与X20AT6402模块相连接,结构如图3所示。
教学平台所用的控制器为贝加莱公司的X20系列标准CPU,型号为X20CP1584,结构如图4所示。PLC控制器作为POWERLINK的主站,通过工业以太网与温度控制部分连接,主要负责自动化程序的实现以及对温度控制部分IO模块的控制。
B&R Automation Studio编程软件是针对贝加莱所有工业自动化产品的集成化的软件开发环境,支持C语言、梯形图、ST语言等多种语言进行程序编写,可灵活编写各种控制算法。该软件能够实现在线仿真功能,脱离硬件本身的限制,大大减少程序的调试时间。
2 实践教学环节设计
2.1 温度控制系统传递函数辨识
传递函数是在零初始条件下系统输出的拉氏变换和输入拉氏变换之比,是经典控制理论中重要的数学模型[9]。传递函数的建立也是进行机械控制工程性能分析与优化的基础。采用MATLAB辨识工具箱进行传递函数的辨识,能够更直观地让学生熟悉传递函数的结构,对于整个系统有更直观的了解。由于温度的传递具有非线性、滞后性的特点,因此,可用一阶惯性串联延时系统来近似描述,其传递函数近似为:
其中,k为被控对象的增益,T为系统的时间常数;τ为惯性常数,s为复变量。
将采集的温度时域信号导入MATLAB中,利用辨识工具箱进行传递函数的拟合。打开“System Identification”进入工具箱,导入需要拟合的数据以及类型,设定好目标函数的格式,即可进行函数的拟合,如图5所示。在此界面可以设置函数的阶次以及进行数据拟合逼近的方法,设置以上参数之后单击“Estimate”即可得到传递函数。
根据以上方法进行温度系统的传递函数拟合,得到的结果如式(2)所示:
2.2 时域分析
时域分析是指控制系统在一定的输入下,根据输出量的时域表达式,分析系统的稳定性、瞬态和稳态性能,具有直观和准确的优点。因此,在进行系统的控制之前,首先要充分地认识系统,掌握系统的变化趋势及特性。为测试系统的性能,将拟合的传递函数进行Simulink仿真,其开环仿真程序和结果分别如图6和图7所示。
从仿真结果可知,系统的响应在给定输入下,其变化趋势会随着时间的变化不断上升,在初始阶段其响应速度是较快的,当时间达到1 400 s时,其响应逐渐趋于稳定,到达系统的最大值。这种变化趋势比较符合系统的实际变化趋势。
2.3 频域分析
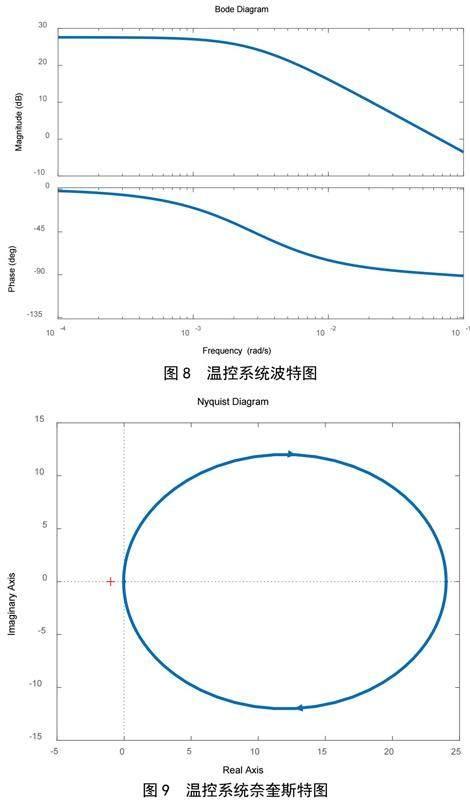
频率特性分析法是经典控制理论的重要分析方法,具有重要的理论与现实意义。在工程中经常利用波特图和奈奎斯特图来判定系统的稳定性。波特图用来描述随着频率的增加,系统的输入和输出之比的变化趋势以及系统的相角滞后趋势。奈奎斯特图常在控制系统或信号处理中使用,用来判断一个有反馈的系统是否稳定。利用MATLAB的“nyquist”和“bode”指令,分析式(2)的频域性能,得到分别是温控系统的波特图和奈奎斯特图,如图8和图9所示。
由图8和图9可知,随着频率的增加,系统输出幅值降低和相角滞后越明显,并且系统的稳定性较高。根据奈奎斯特图可知,系统在极坐标图上的轨迹处于极点的右侧,其环路正弦增益系数没有包围极点,说明系统是稳定的。
2.4 PID校正控制
PID(Proportional Integral Derivative)校正是实际工业控制中应用最广泛、最成功的控制方法,也是机械控制工程系统性能指标与校正的重要内容。所谓PID控制,就是对偏差ε(t)进行比例、积分和微分运算后形成的一种控制规律。为了获得良好的稳态特性和动态特性,需要对系统的控制环进行校正和调整。增量式PID的计算公式如式(3)所示:
以温控系统的传递函数为对象,进行PID控制仿真与实验,其仿真程序如图10所示,响应时间200 s,Kp=1.2,Ti=0.003,Td=0.1。设置系统的初始目标值为50 ℃,在时间为100 s时,阶跃目标响应为70 ℃。
为了验证PID的实际控制效果,本文以多温区固体机台温度控制系统进行实验验证,初始条件设置与仿真条件相同,其仿真和实验结果如图11和图12所示。
由实验结果可知,PID控制能够较好地控制温度系统,且稳定性较高,误差较小。由于温度系统是在室温条件下进行实验,因此,实验结果的起始条件为室温,但是其温升所用时间基本与仿真结果相符。
3 结论
本文将温度控制系统与机械控制工程基础理论相结合,首先进行传递函数的拟合,再利用传递函数进行时域和频域分析,能够更加直观地了解系统的变化趋势,最后进行PID校验控制,通过实验结果让学生认识控制工程理论在实际工程中发挥的
作用。
除本文所述之外,多温区温度控制系统还能够进行多输入—多输出的现代控制理论实验,验证各种先进控制算法,可以在此基础上开发现代控制理论实验环节,进一步拓展机械控制工程实践环节的范围。
参考文献
[1] 田雪虹.工程教育专业认证下《机械控制工程基础》课程教学改革[J].装备制造技术,2021(2):139-141,158.
[2] 彭宝营,陈秀梅,黄民,等.机械控制工程案例教学研究[J].中国教育技术装备,2016(6):11-13.
[3] 李春明.机械控制工程基础的几点创新[J].机械设计与制造,2017(4):37-39.
[4] 靳伟,张学军,姜彦武,等.基于机械类本科专业能力培养的控制工程课程教学研究[J].大学教育,2020(12):84-86.
[5] 李磊,白瑞祥.模糊PID在热水锅炉温度控制系统中的应用[J].工业控制计算机,2007(2):41-42.
[6] 樊军庆,张宝珍.温度控制理论的发展概况[J].工业炉,2008(6):12-14.
[7] 孙文静,孙宜田,张秀国.基于Proteus的农业温室温度控制系统的设计与仿真[J].机电产品开发与创新,2013,26(6):112-114.
[8] B&R Industrial Automation Inc. ETAL TEMPERATURECN[M].2018.
[9] 朱骥北,徐小力,陈秀梅.机械控制工程基础[M].2版.北京:机械工业出版社,2013.
*项目来源:教育部产学合作协同育人项目(201902168012)。
作者:彭宝营,北京信息科技大学机电工程学院,副教授,研究方向为数控技术与装备;陈秀梅、许博、刘忠和、贺绍亚,北京信息科技大学机电工程学院(100192)。
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
中学生数理化·中考版(2022年11期)2022-02-16
小哥白尼(趣味科学)(2019年6期)2019-10-10
考试周刊(2016年79期)2016-10-13
考试周刊(2016年79期)2016-10-13
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
发明与创新(2016年38期)2016-08-22
