
Wearable Robots for Human Underwater Movement Ability Enhancement: A Survey
2022-06-25 01:17HaishengXiaMuhammadAlamgeerKhanStudentZhijunLiandMengChuZhou
Haisheng Xia,, Muhammad Alamgeer Khan, Student,Zhijun Li,, and MengChu Zhou,
Abstract—Underwater robot technology has shown impressive results in applications such as underwater resource detection. For underwater applications that require extremely high flexibility,robots cannot replace skills that require human dexterity yet, and thus humans are often required to directly perform most underwater operations. Wearable robots (exoskeletons) have shown outstanding results in enhancing human movement on land. They are expected to have great potential to enhance human underwater movement. The purpose of this survey is to analyze the state-of-the-art of underwater exoskeletons for human enhancement, and the applications focused on movement assistance while excluding underwater robotic devices that help to keep the temperature and pressure in the range that people can withstand. This work discusses the challenges of existing exoskeletons for human underwater movement assistance, which mainly includes human underwater motion intention perception,underwater exoskeleton modeling and human-cooperative control. Future research should focus on developing novel wearable robotic structures for underwater motion assistance,exploiting advanced sensors and fusion algorithms for human underwater motion intention perception, building up a dynamic model of underwater exoskeletons and exploring human-in-theloop control for them.
I. INTRODUCTION
WITH the rapid development of our society, various robots have entered all areas of human life and become a helpful assistant and close partner of human beings. For underwater areas, underwater robot technology such as remotely operated vehicles [1], autonomous underwater vehicles [2], robotic fish [3], and underwater multi-robot systems [4], continues to develop and has shown many results in water quality monitoring [5], marine biological research[6], and underwater manipulation [7]. However, due to the extremely complex underwater environment and limited autonomous operation capabilities of robots, in many cases,human intelligence and human dexterity cannot be fully replaced for the time being. They include underwater rescue,underwater maintenance, and even frogman in the war. By nature, human beings are not suitable for the underwater environment due to their physiological structure, which results in insufficient motor functions in the underwater environment,such as slow swimming speed compared to underwater creatures [8], and quick fatigue [9]. Underwater operators usually receive rigorous training, while the tasks they can complete are greatly restricted by the limits of human stamina.Although there are underwater propellers that can assist human underwater propulsion, propulsion systems have poor concealment [10] and usually occupy the hands of underwater operators, making it difficult to complete many complex tasks.
Inspired by the high efficiency and mobility of marine organisms, human underwater movement ability, especially speed, could potentially be enhanced if humans could swim underwater like marine organisms. Compared with fish that have a vertical tail and swing horizontally to generate propulsion [11], the swimming motion of underwater mammals such as dolphins is probably more worthy of learning. As the tail of the dolphin is horizontal, it swings up and down to generate propulsion [12]. Based on the structure of human legs, the up and down motion of the dolphin’s tail is achievable [13].During Olympic Games, such underwater dolphin kick is widely used at the start and after turning (15 meters allowed by the rules) [14] to increase speed. However, human cannot sustain this for long. One reason is the need to breathe, while the other is fatigue. For underwater operations, a self-contained underwater breathing apparatus can be used to solve the breathing problem, and one can wear fins to assist propulsion,while for fatigue and endurance, there is currently no solution yet.
Wearable robots (exoskeletons) have been reported to effectively enhance human motion. Researchers have conducted many studies on exoskeletons, which have realized the enhancement of human weight-bearing capacity [15], reduction of metabolic energy consumption [16], and rehabilitation of motor functions [17]. However, studies on exoskeletons have mainly focused on improving land locomotion, instead of being aimed at improving the diving/swimming ability of underwater operators. There are several differences in locomotion between human underwater movement and land movement. For example, there is a ground reaction force when walking on land, while underwater movement mainly contains water buoyancy and drag. Human movement on land is mostly performed in a vertical position, while underwater movement is mostly performed in a horizontal position. These differences lead to different design and control of underwater exoskeletons. Despite these difficulties, Neuhauset al. [18]have proposed a conceptual design for upper and lower-limb underwater exoskeletons. Zeng presents a hydraulic-based underwater exoskeleton to assist free-style kicking [19]. Wanget al. [20] have designed a cable-driven underwater exoskeleton to assist breaststroke. Due to the importance of human underwater motion enhancement and increasing research interest in such fields, there is a need to clearly present the state-of-art of underwater exoskeleton-related work, thus helping researchers build highly-desired and high-performance underwater exoskeletons on the top of prior work.
The purpose of this survey is to analyze the state-of-the-art of underwater exoskeleton for human underwater movement enhancement and to identify existing challenges that hinder the development of this field as well as potential future directions. For the papers that are selected and reviewed,robotic devices should be designed to help human underwater motion like swimming or diving. We have excluded the studies that focus on passive robotic devices like fins, or powered robotic devices that are not wearable, or wearable robotic devices for other purposes such as keeping the temperature and pressure in a range that people can withstand.Sensing, actuation, and control are the key points of robotic systems. For example, the control is like a “brain” of a robot.Putting a human in the control loop for robots has achieved encouraging results. Researchers have applied a human-inthe-loop control strategy to exoskeletons and achieved reduction in metabolic cost during walking [21], [22]. Linet al. [23] have applied human-in-the-loop control for multiagent systems and achieved desired performance even with actuator faults. The contribution of this paper lies in that it summarizes the state-of-art of exoskeletons for underwater motion assistance, identifies key technologies, and discusses potential future directions, thus helping researchers build required high-performance underwater exoskeletons on the top of prior work.
The rest of the paper is organized as follows. In Section II,we provide an overview of underwater exoskeletons and their applications. The core technologies and challenges of underwater exoskeletons are described in Section III. In Section IV, we present potential directions for underwater exoskeleton research, and finally, in Section V, the conclusions are given.
II. UNDERWATER EXOSKELETON
The idea of an “exoskeleton” comes from the natural world,where it is an external cover for animals, acts as protection for the body, formation of the structure, and sensation of the surrounding environment. Humans create exoskeletons to mimic nature and try to enhance human performance.Underwater exoskeletons have a great potential to assist human swimming and diving motions. Along the timeline,underwater exoskeletons were first proposed as a conceptual design [18]. The first real prototype was a rigid one [19], and recently a soft underwater exoskeleton was introduced in [20].
A. Conceptual Design of Underwater Exoskeletons
When a human is in the water, it is like when a fish is out of the water. The physical structure of the human body has highdrag in the water, and human does not have structures like flippers to assist propulsion. Even though a human could wear fins to acquire such an advantage, human muscles are not evolved for underwater locomotion, and thus still need an external power assist to achieve high swimming speed and long endurance. A powered underwater exoskeleton could potentially play a role. When swimming, the wearers just move their arms and legs with a normal swimming motion,and if they wanted to increase the swimming speed to chase a target, they could simply speed up their swimming motion. At the same time, an underwater exoskeleton can help the wearers to amplify their swimming motion, thus saving the metabolic energy consumption of the wearers, making the exoskeleton a powerful extension of the wearer. In human underwater motion, the propulsion movement mainly comes from limbs, thus, an underwater exoskeleton should assist the arms and legs’ periodic motions. The arms move back and forth, with a backward stroke generating the thrust and the forward stroke returning to the beginning position again [24].The leg typically moves up and down, with the flutter kicking the legs in opposite phases [25] while dolphin kicking the legs synchronously [26], while for frog kicking, the leg motion is symmetric and mimics a frog [27].
For arm motion in underwater swimming, a turtle is a good nature teacher to learn from, where they use flapping arms for propulsion. The paddle of a boat is also inspired by this, and many underwater robots have utilized this propulsion method[28], [29]. Neuhauset al. [18] have proposed a preliminary concept design of an upper-limb underwater exoskeleton(Fig. 1(a)). The exoskeleton amplifies the human flapping motion, while the pitch motion remains passive. Even though this is a creative idea, an arm flapping motion is not natural for human swimming. More importantly, during underwater operations, arms and hands are important, which should be reserved for dexterous manipulation. Furthermore, although an exoskeleton is designed to do most of the work, its wearer needs to control the pitch angle of the paddle during a flapping motion, which a human is not familiar with, and hard for the exoskeleton to control with sensor input. Despite the above-mentioned disadvantages, this concept is of value to inspire future upper-limb underwater exoskeleton design.Implementing and testing it may help one understand more upper-limb underwater exoskeleton theory, and inspire more paddle flapping-based underwater robots.
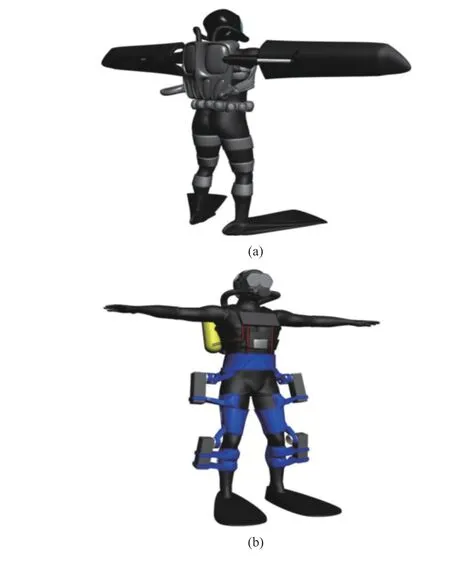
Fig. 1. Conceptual design of underwater exoskeletons [18]. (a) An upperlimb underwater exoskeleton concept inspired from turtles; and (b) A lowerlimb underwater exoskeleton concept inspired from dolphins.
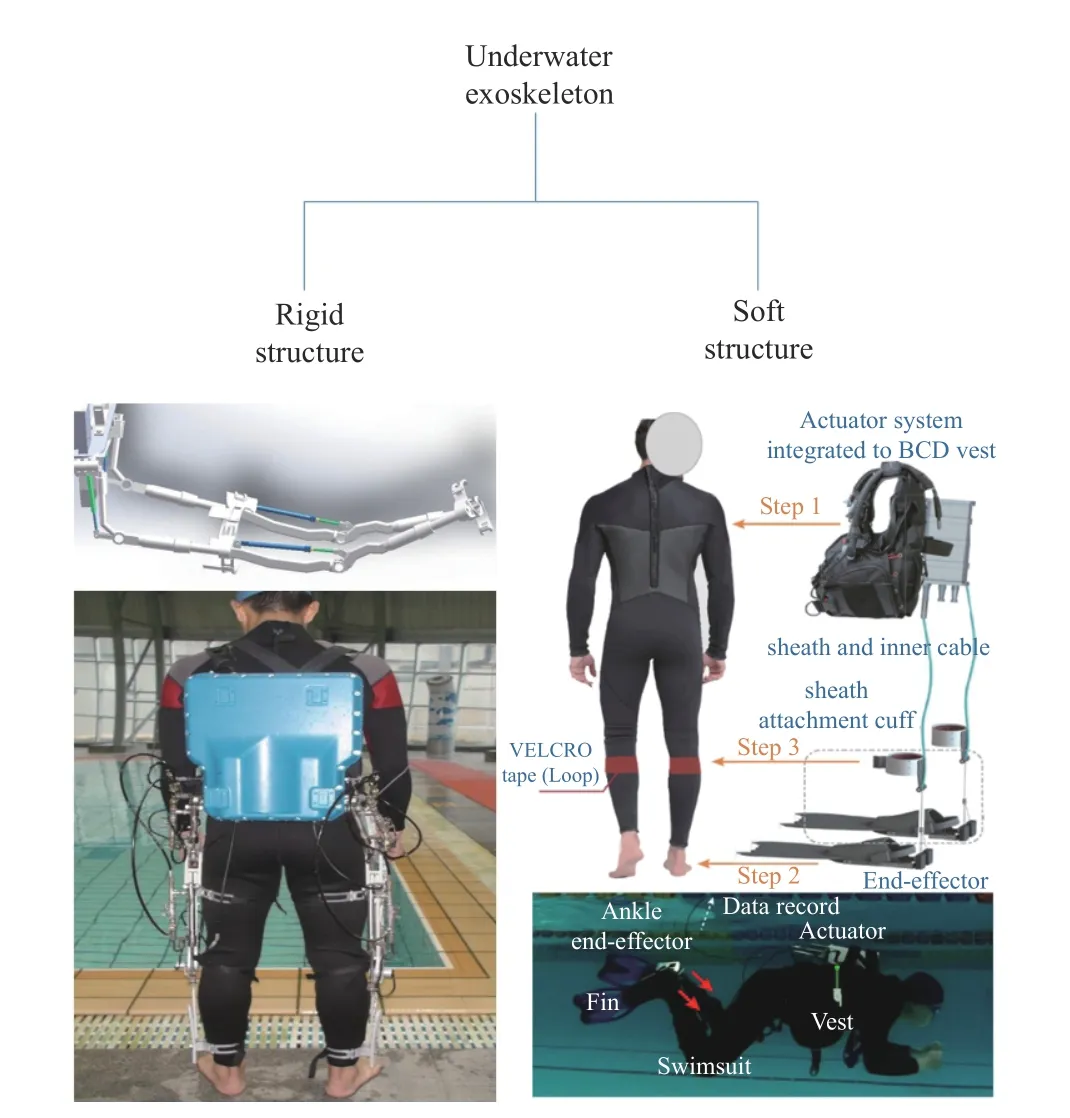
Fig. 2. Underwater exoskeletons classified into rigid and soft ones. (left)Representative hydraulic-based rigid underwater exoskeleton [19]; (right)Representative cable-driven soft underwater exoskeleton [20].
For human underwater swimming, the propulsion mainly design, they have designed its control method [32] and performed its kinetics analysis [33], where related work is summarized in Table I. In their design, hydraulic power is chosen as it has a compact structure, a high power-to-weight ratio, and a good seal. An STM32 single-chip microcontroller is used as the central processing unit, a hydraulic pressure sensor is used to measure the hydraulic circuit state, and a rotary encoder is used to measure the joint angle. Its structure is mainly made of steel and aluminum. The control circuit and battery are sealed in a box attached to the back of the wearer.A real underwater swimming test (one subject, one minute with oxygen supply, and 1.3 meters below the water surface)is performed to verify its performance. The standard deviation of the trajectory tracking errors of hip and knee joints are 0.31 mm and 1.3 mm, respectively. The actual curve has a delay of 0.04 seconds compared with the planned curve,which is likely due to the characteristics of its hydraulic system.comes from lower limbs, and the use of fins would greatly increase the speed and efficiency [30]. Both of the abovemotioned flutter kick and dolphin kick mainly include leg motion in one plane (sagittal plane), which would possibly be easier to implement compared to a frog kick that involves multi-plane actuation. A preliminary conceptual design of a lower-limb underwater exoskeleton is proposed to assist lower-limb motion in a sagittal plane as shown in Fig. 1(b)[18]. The exoskeleton would amplify the hip and knee motion,while the ankle motion would remain passive. As the thrust mostly comes from the downward motion of the leg during swimming [31], the design idea of this exoskeleton is to only actuate in the down direction. It is logical to actuate the exoskeleton only in one direction to follow human nature.However, it should be noted that the exoskeleton is able to change the anatomical structure of a human, and increase the muscle strength. Actuating leg motion in the upward direction could possibly reduce the metabolic cost, and possibly increase thrust during this phase, thus potentially increasing human swimming speed. Their design omits the ankle joint,while it has to be noted that the ankle mainly transfers the load. If some mechanical structure is added to the ankle component of the exoskeleton to limit the ankle rotation,human metabolic cost can potentially be reduced.
B. Rigid Underwater Exoskeletons
The first reported underwater exoskeleton is indeed a rigid one [19]. Chen’s team has developed such a hydraulic-based underwater exoskeleton shown in Fig. 2. Besides the structure
In order to achieve good human-machine coordination when wearing an exoskeleton, [33] has analyzed the leg motion of freestyle swimmers to obtain the ideal motion curves of hip and knee joints. The ideal motion curves are used as the target joint curves of the underwater exoskeleton. The Newton-Euler dynamic equation is used to model the underwater exoskeleton, and inertia force and moment from the center of thigh and shank are calculated based on the Newton-Euler iterative algorithm. Then, the force equivalent method is utilized to calculate the water resistance as the concentrated force and equivalent torque on the end of the thigh and shank.The required hip and knee joint torques are eventually obtained. Reference [33] has analyzed the influence of thelength of the exoskeleton thigh and shank on underwater dynamic performance, and concluded that the torque and power requirement is higher for those who have longer legs.This is intuitive as longer legs would cause larger water resistance, which would require higher torque. Future underwater exoskeleton design should consider adjustable leg length and adequate actuator power.
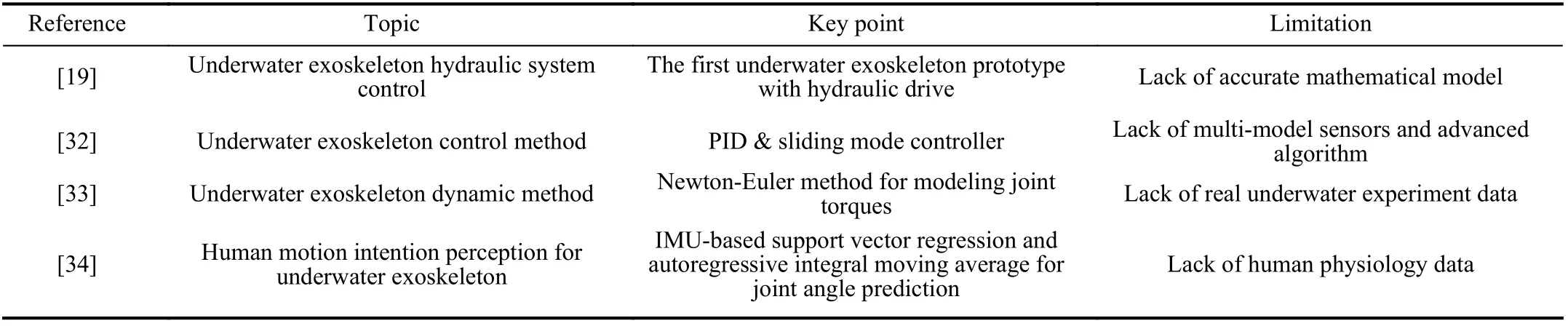
TABLE I COMPARISON OF DIFFERENT RIGID UNDERWATER EXOSKELETON-RELATED RESEARCH
The underwater exoskeleton in [33] can only move according to a pre-defined trajectory, which fails to consider human movement intentions. To solve this problem, [34] has designed an initial measurement unit (IMU) based human underwater movement tracking system, which predicts joint angle and then uses it to predict human motion intention. Five IMUs are attached to the lower back, both lateral sides of thigh and shank to measure human movement. The leg motion is divided into four phases: 1) the thigh moves upwards and the shank moves upwards, 2) the thigh moves downwards while the shank moves upwards, 3) the thigh moves upwards while the shank moves downwards, and 4) the thigh moves downwards and the shank moves downwards. The wavelet packet features of the IMU sensors are extracted, and the leg motion phase is classified based on a support vector machine with an accuracy of 94%. An algorithm based on support vector regression and autoregressive integral moving average models is used to predict hip and knee joint angle, with Rsquare values of 0.96 and 0.97, respectively. Although the prediction accuracy is relatively high, this is only compared to ideal leg motion, which is still pre-defined. Therefore, the benefit is limited to minimizing the trajectory tracking latency. Thus, more research is needed to explore human underwater motion intention recognition methods to enable a more intuitive human-machine interaction.
C. Soft Underwater Exoskeletons
A rigid exoskeleton has the benefit of weight supporting for on-land applications, while this might become useless when it comes to underwater applications. There is “hard” support from a ground reaction force when walking on land, while there is only “soft” support from buoyancy when swimming in water. A soft exoskeleton typically has a compact and light structure, and can minimize the joint misalignment between a wearer and robot, which can potentially minimize the wearer’s discomfort [35]. Wanget al. [20] have designed an underwater soft exoskeleton to assist breaststroke (Fig. 2).They have utilized a cable-driven system that transfers motor rotation to the cable winding on a pulley and eventually pulls the heel to assist the wearer. The actuator, controller, and battery are sealed together with a buoyancy compensator that is worn on the wearer’s back. There is an anchor point on the shank for the outer cable, and the inner cable extends to the end of the fin. A real underwater swimming test is performed to validate the effectiveness. Three professional swimmers participate in the study, and results show that with the assistance from the exoskeleton, the peak values of electromyography (EMG) of gastrocnemius and soleus are decreased by 49.13% and 74.51%, respectively, which are significant.
In [20], breaststroke leg motion is divided into three phases:sweep, lift, guide, and recovery [24]. At the sweep phase, an exoskeleton provides the propulsion, and the cable acts as an artificial muscle that works together with calf muscles. Seven IMUs mounted on the thighs, shanks, and feet of both sides and back are used to measure human movement, a torque sensor is used to measure cable tension, and a position sensor is used for cable length calculation. The control of actuation is motion phase-based, mostly on the ankle joint angle and cable length. The EMG signal is measured to verify the function of the exoskeleton. Although the peak and integrated EMG signals are reduced when wearing an exoskeleton, whether it can reduce the metabolic energy cost remains unknown.Typical physiological effort can be measured with indirect metabolic cost with a gas exchange device [36], but this method cannot be used for the underwater case. One possible solution is underwater swimming with an oxygen supply. For the same distance traveled, less oxygen consumption can verify the assistance from an exoskeleton. Reference [20]measures EMG only to verify a device’s performance, while an EMG signal could reflect human motion intention, which may be useful for human interactive control. Future research should consider fusing multi-modal sensor data to better precept human movement intention.
III. CORE TECHNOLOGIES AND CHALLENGES
The ways to actuate exoskeletons, sense human intention,and control the exoskeleton have been an important area in realizing a friendly human-machine interaction. The prosperity of underwater exoskeletons would depend heavily on the development of those enabling core technologies. This section describes and analyzes the current key technologies from three aspects: actuation (“muscles”), sensing (“eyes”),and control (“brain”) of underwater exoskeletons.
A. Actuation
The choice of an actuator is a key problem in exoskeleton design. The size, hardness, and power consumption would affect the overall performance of an exoskeleton. A motor is the most commonly used actuator. Intuitively, putting the motors beside human joints with links can form a rigid exoskeleton as shown in the top-left of Fig. 3(a) [37]. Motors can achieve good position control with precision and reliability, while rigidness may influence its human user’s comfort. The usage of series elastic actuators can add flexibility to the joint, though it would lower the position control precision [38]. A hydraulic system is also commonly used for a rigid exoskeleton [39], which has a high ratio of actuator power to actuator weight. Gao [32] and Qin [33] have applied such system to an underwater exoskeleton as it has good sealing properties (Fig. 3(b)). Despite the motion accuracy, the misalignment between an exoskeleton and its wearer can possibly affect the latter’s mobility and metabolic cost [40].
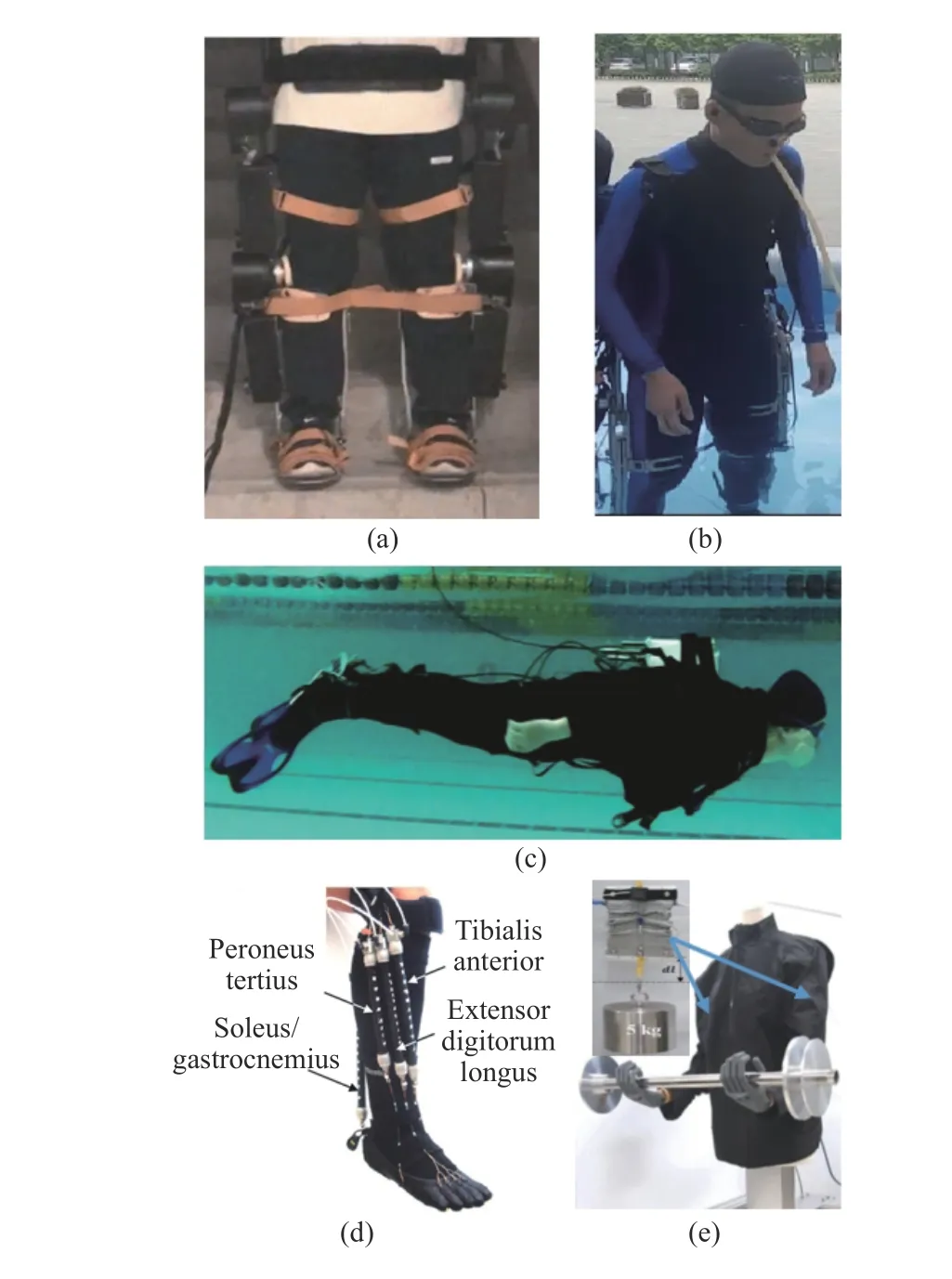
Fig. 3. Exoskeletons with different actuation systems. (a) Rigid exoskeleton driven by motor proposed by the University of Science and Technology of China [37]. (b) Rigid underwater exoskeleton driven by hydraulic power proposed by University of Electronic Science and Technology of China [30].(c) Soft underwater exoskeleton with cable-driven system proposed by Peking University [20]. (d) Soft exoskeleton powered by pneumatic artificial muscle from Carnegie Mellon University [41]. (e) Soft exoskeleton driven by shape memory alloy from Korea Institute of Machinery & Materials [44].
Soft actuators that form soft exoskeletons with compliance and adaptability can possibly increase user comfort. Changing a rigid link connecting to a motor into a cable can form a cable-driven actuator, thus making it a “soft” actuator (Fig. 3(c)).This actuation form can remove the weight at the distal part of a human closer to the center of mass, thus potentially reducing metabolic cost [16]. Yet attention needs to be paid to the anchoring and cable pathway. A pneumatic artificial muscle as shown in Fig. 3(d) is another commonly used soft actuator[41]. It has good compliance though the stroke that the actuator could provide is typically small and non-linear [42].Recent research has applied novel geometric constraints to a pneumatic muscle for a larger stroke [43]. A shape memory alloy shown in Fig. 3(e) is a material-based soft actuator that can be integrated into exoskeletons [44], though its power efficiency seems low.
For underwater applications, aquatic atmosphere is an important factor to consider. Most commonly-used motors are not waterproof. There are mainly two ways to make them waterproof. One is custom design motors that are waterproof(with high-quality oil paint on the coil), and another is to pack them in a waterproof case and transmit the power out with a transmission mechanism [20]. A hydraulic system itself has good sealing properties. A pneumatic system also has good sealing while it is difficult to find a source of air because the amount of air is limited in the underwater environment. Based on these comparisons, a cable-driven system is a desired option in serving as an actuator of an underwater exoskeleton.
B. Sensing
Sensors gather important information from a wearer that enables an exoskeleton to sense the human motion intentions.For the success of an underwater exoskeleton, such intentions should be detected in a timely and accurate manner, which is even more important than making an exoskeleton move. There are mainly two ways to understand human movement intention. One is by measuring the movement directly, the other is to measure the neural signal that controls human movement. For measuring the movement directly, a mechanical signal is detected. Pressure sensors are typically mounted beneath the feet to detect foot contact with the ground and help one identify gait events [41]. IMUs can be put at the center of mass [16], thighs [45], shanks [46], and feet [47] to detect certain phases in a gait cycle. A stretch sensor is used to measure elbow joint motion and thus help us control a soft elbow exoskeleton [48]. Other mechanical sensors apply special characteristics of materials, such as a triboelectric sensor used in an arm exoskeleton for measuring a joint angle [49]. Dadashiet al. [50] have used IMUs to establish a breaststroke model based on a hidden Markov model to realize the modeling and prediction of arm and leg movements. Zhanget al. [51] have attached IMUs on the thighs, legs, and feet of both lower limbs to establish a lower limb model to classify four swimming styles of butterfly,breaststroke, freestyle, and backstroke. Wang [34] has classified diving and non-diving states based on IMUs, as well as detected four leg swing phases of diving states. One main drawback of using a mechanical signal for detecting human intention is large time delay, as human movement is inherently behind human intention.
Neural signal, in theory, is ideal for capturing human movement intention, as the brain sends the neural signal to the muscle, the muscle drives the bone to move the body. If such signal can be decoded, then an exoskeleton could apply a proper force to assist human in a timely and accurate manner.EMG signals associated with muscle movement reflect the activities of specific muscle groups, which are often used to predict human movement intention. Naiket al. [52] have used EMG sensors combined with independent component analysis to achieve an accuracy of 95% in the classification of 11 types of movements in amputees. Guiet al. [53] have estimated the active joint torque of human motion using EMG signals based on a radial-basis-function neural network, and applied it to a 2 degree of freedom (DOF) lower limb exoskeleton’s control.Yanget al. [54] have extracted the end stiffness of a human upper limb by using EMG and mapped it to the robot impedance controller to realize the skill transfer control of an upper-limb exoskeleton. Despite the benefit of EMG signal, it is vulnerable to skin impedance change, muscle fatigue, and ambient noise. As a result, EMG has not been used in underwater motion intention detection, though it is promising.
C. Modeling and Control
Modeling is one of the most important parts of robot control, and a sophisticated model could enable a clear description of the robotic system, and precise control as well.For example, biped robots are usually modeled as inverted pendulum [55]. Research on underwater exoskeletons is relatively preliminary, thus its model is not precisely designed so far. In [32] and [33], a hydraulic-powered underwater exoskeleton is modeled as links and joints (Fig. 4). The Newton-Euler method is used to describe the system. The torques on the hip (τH) and knee (τK) joints are
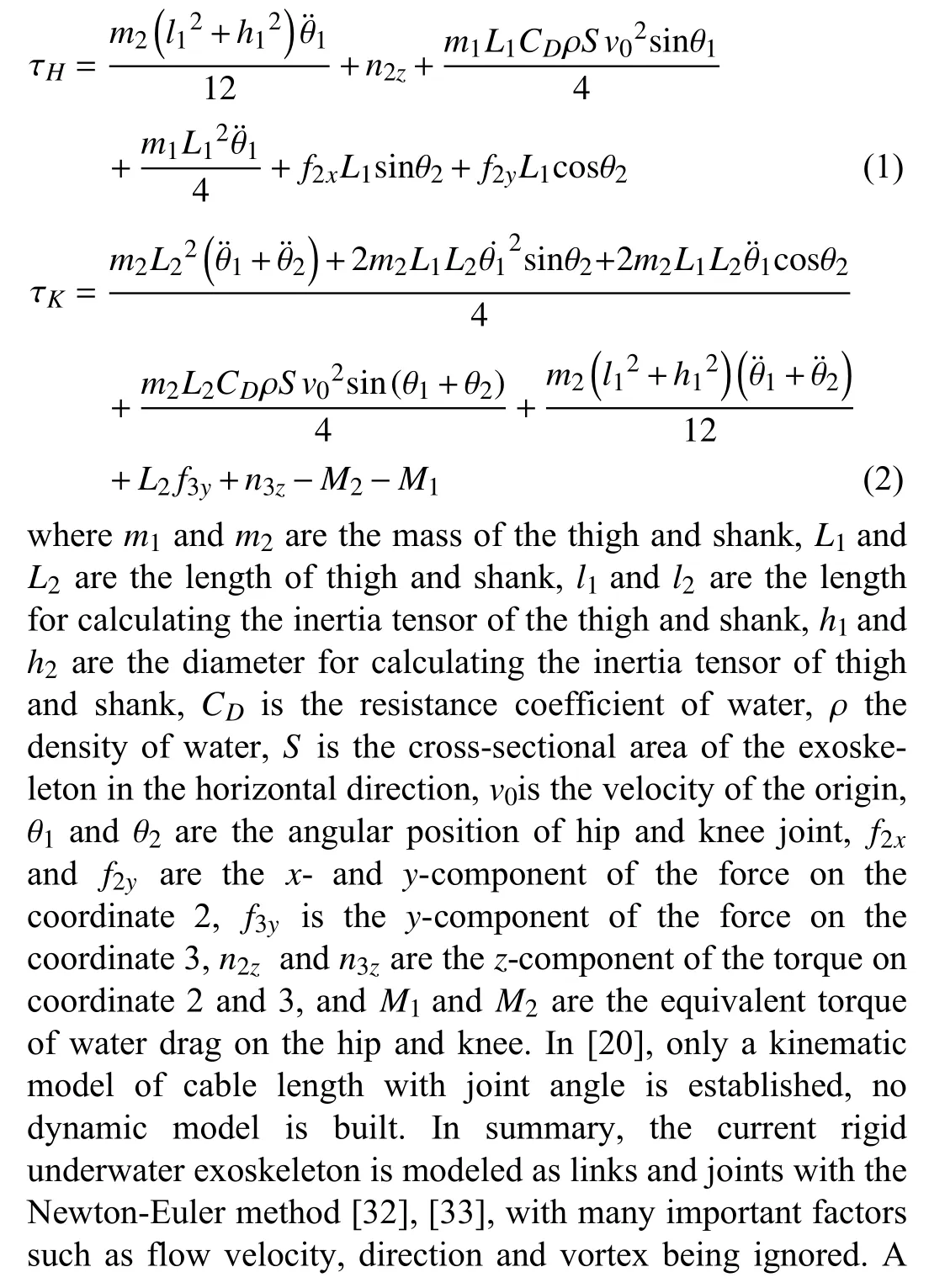

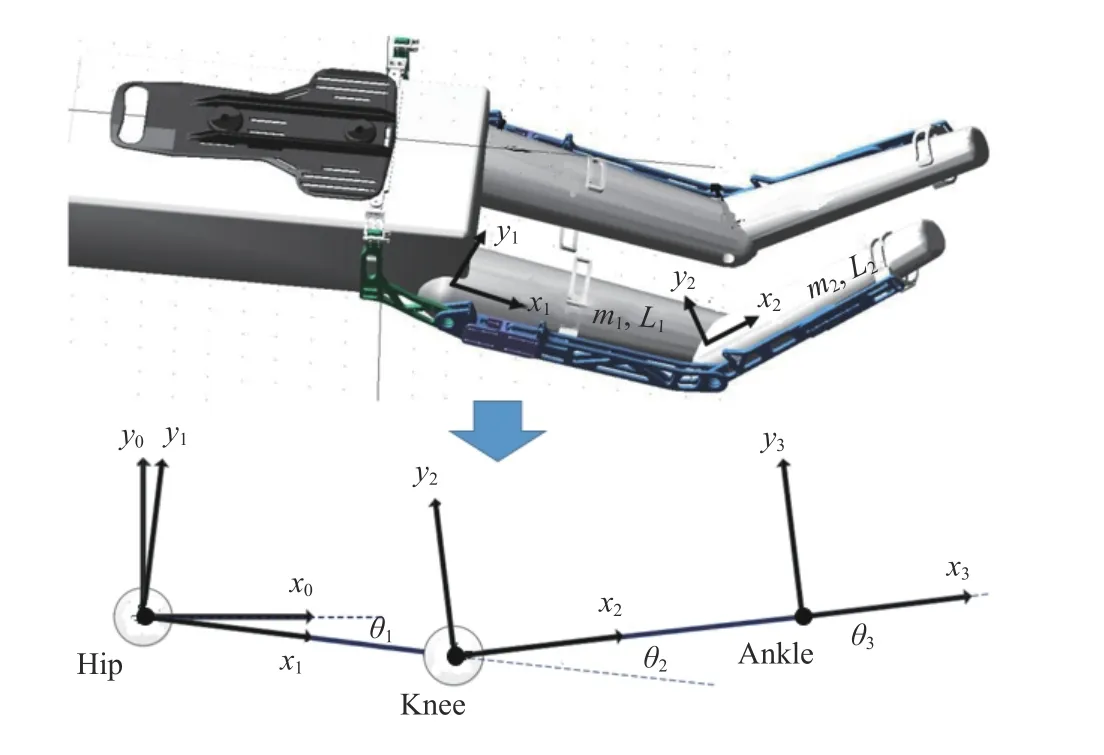
Fig. 4. Model of the hydraulic-powered underwater exoskeleton, image modified from [32].
A control method has a great effect on the use of wearable robots. In existing work, both the above-mentioned rigid and soft underwater exoskeletons use motion phase-based control strategies. This control strategy is intuitive while it can only achieve the discrete switch of a control state, thus making it hard to ensure the smooth control of an exoskeleton. Human lower-limb periodic movement is partially controlled by a central pattern generator, which repeats over and over again,and can be described by phase variables like human joint angle [56] and plantar pressure [57]. However, this control strategy relies heavily on the accuracy of human state recognition, and wrong recognition can result in wrong motions that raise discomfort or even safety problems.Another commonly used control strategy is human-machine interactive control based on impedance [58] or admittance[59]. However, it typically tracks pre-defined trajectories, and is hard to be effectively used in a soft exoskeleton system.
An exoskeleton control system can be divided into three layers, namely, upper-level human/environment recognition,middle-level assistive force planning, and lower-level actuator control ones (Table II). The upper-layer usually includes a human-machine interface and environment detection interface.Electroencephalogram and EMG are commonly used signals for human-machine interface [60], and cameras are commonly used for environment detection [61]. The middle-layer usually includes gait phase detection and assistive force planning.Joint angle profile [46] and machine learning [62] are commonly used for gait phase detection. A position or torque profile is generated from assistive force planning, for example, the above-mentioned rigid [32] and soft [20]underwater exoskeletons fall into this layer. The lower-layer usually includes a position/speed controller, and torque controller. Proportional-integral-derivative control is commonly used for the former, and series elastic actuator for the latter [63]. Depending on the complexity of system design, an exoskeleton’s controller could include some or all of theabove-mentioned layers. All three layers for an underwater exoskeleton should be comprehensively studied to enable a better human exoskeleton interaction.

TABLE II THREE DIFFERENT LEVELS OF AN EXOSKELETON CONTROL SYSTEM
IV. POTENTIAL FUTURE OPPORTUNITIES
An underwater exoskeleton is an emerging research topic.Due to the complex underwater environment, few research foundations, and the above-mentioned challenges, we find that its research has been moving along at a slow pace. As the research basis is relatively weak for this field, future research should focus on prototype design with novel structures, multimodal sensing data fusing to understand human movement intention, and in-depth modeling together with human-in-theloop control to involve human factors for better humanmachine interaction.
A. Novel Structures for Human Assistance
When it comes to the structural design of a wearable robot,it is important to consider the DOF of a human. Human lower limbs have three joints with nine DOFs on each side, while for the knee joint, most of the motion only comes from the sagittal plane due to its physical structure. Taking underwater swimming motion characteristics into consideration, for the ankle joint, the motion mostly comes from the sagittal plane and is usually considered to be passive [64]. Thus, for structure design, five main joint motions should be considered: hip extension-flexion (sagittal plane), adductionabduction (frontal plane) and rotation (horizontal plane), knee extension-flexion (sagittal plane), and ankle dorsiflexionplantarflexion (sagittal plane). For a rigid exoskeleton, all these DOFs can be easily implemented with motors while for hydraulic power it would be hard to achieve hip rotation. For a soft exoskeleton, a cable-driven system could easily be used to achieve sagittal and frontal plane motion with the cable connecting on different sides of the joint to generate the movement [46]; while it could be hard to achieve hip rotation as the anchoring point has to be ingeniously designed.Pneumatic power is similar to cable-driven one in motion planes; while it can be actuated for both shortening and lengthening [43], by inflating or vacuuming. An electrostrictive actuator could be compact, though the force it could generate is relatively small [65]. Fins that assist human underwater motion passively could also be integrated into an underwater exoskeleton structure, and even novel design to make fins active could be considered.
Another important issue to consider is metabolic cost.Human movement requires muscles to do both positive work and negative work, both of them require metabolic cost. Thus,for human assistance, an underwater exoskeleton should assist the motion phase that requires muscle positive work and makes the use of the phase that requires negative work. A novel robotic structure should be designed to follow human factors to avoid increasing metabolic cost and even harvest energy that might just otherwise be wasted [66]. For on-land motion, such structure could reduce metabolic cost even if the exoskeleton is unpowered. Collinset al. [67] have designed a novel ankle-foot passive device with spring and clutch, which can reduce 23% metabolic cost during walking. Yunet al.[68] have studied a human squat-lifting pattern and developed a passive exo-suit with a variable-impedance mechanism which reduces 5.3% metabolic cost during squat-lifting. These imply that human underwater movement should be comprehensively analyzed to determine which motion phrase requires assistance, and to guide the corresponding structure design. As water environment is harmful to electronic parts,waterproof is also an important factor to consider in such structural design.
B. Sensing Fusion and Human Intention Perception
The accurate estimation of human motion intention can be used to greatly improve the assistance effect of an underwater exoskeleton. Based on previous work, physical information(signal measured from IMU) has been used in underwater motion classification. Physiological information (such as EMG signal) has the potential to perceive the intention of human but has not gained its underwater application yet.Underwater environment is very complicated. It is difficult to accurately and reliably predict human motion intention by a single kind of sensor information. It may be helpful to establish a cross-modal interface for more sensing information to fuse, and to explore a new method to perceive human motion intention in the underwater environment.
Mechanomyography (MMG) signal is not affected by sweat and skin impedance, and has recently been proposed to estimate human motion intention. Siddiqui and Chan [69]have designed an array of microphones to collect MMG signals at the wrist for gesture recognition and achieved a recognition accuracy of 90%. Wilson and Vaidyanathan [70]have applied MMG signal for prosthetic control, and the recognition rates of 2 classes and 5 classes of movements can reach 93% and 62%, respectively. Wuet al. [71] have used MMG on the thigh to classify 4 types of knee motion with an accuracy of 94%. EMG and MMG signals have shown good results in on-land motion recognition, while they have not been used in underwater motion recognition yet. For underwater exoskeleton applications, comprehensively considering the muscle activation with both EMG and MMG signals should help us well understand human intention.
While a single modal sensor only provides limited information, multiple modals of sensors can provide more insight with similar and complementary information.Extracting features and fusing them could help us understand the relationship among cross-modal signals. A human underwater body sensor network can be built to capture all related information during human motion (Fig. 5). Machine learning algorithms could be used to understand the coherent,complementary, and redundant multi-modal information related to the same motion process. With a good understanding of the wearer, a better control strategy can be generated.The effects of different sensor locations on data acquisition in a body sensor network should be considered, and the minimum number of sensors that can obtain sufficient underwater motion information should be determined, thus helping us simplify system design.
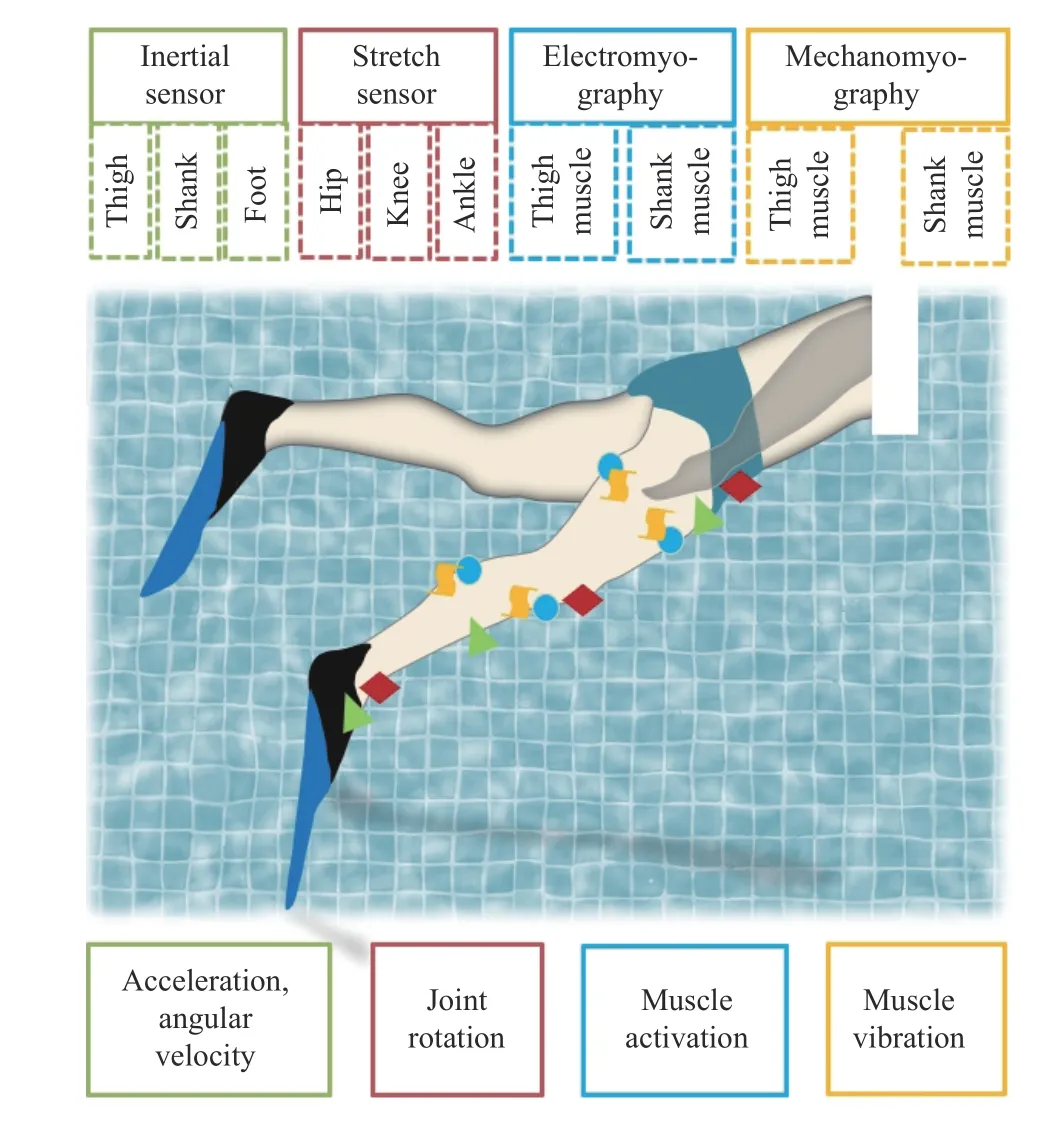
Fig. 5. Human underwater body sensor network. Inertial sensor can measure limb angular velocity and acceleration, stretch sensor can measure joint rotation, EMG sensor can measure muscle activation, and MMG sensor can measure muscle vibration. Fusion of multi-modal sensors can potentially benefit the understanding of human underwater motion intention.
C. In-Depth Modeling and Human-in-the-Loop Control
Accurate modeling of underwater exoskeleton dynamics is the basis of an accurate control of an exoskeleton. Currently such modeling work is relatively preliminary. Both the human movement and the underwater environment are greatly simplified in currently available underwater exoskeleton studies. The frictional drag in the heading direction is ignored in the modeling and water is considered as static without fluid acceleration. Important hydromechanics such as flow velocity,direction and vortex are not taken into consideration either.These simplifications would possibly lead to the failure of accurate underwater exoskeleton modeling. Advances in underwater sensing could potentially facilitate such modeling work. An artificial lateral line is developed to sense water flow velocity, direction and vortex to mimic a fish [72], [73].A hydrogel-based soft sensor can measure pressure and bending in the liquid environment [74], which may potentially enable more accurate modeling of an exoskeleton’s interaction with water. Since a human and underwater exoskeleton are coupled together, the latter’s modeling may potentially reference a human swimming model [75]. The model for an underwater humanoid robot is also worthy of reference [76],[77].
Without putting a human in a closed control loop, an exoskeleton may not help its human wearer well, and even possibly fight against the latter. In recent years, the humanmachine cooperative control strategy named “human-in-theloop” has achieved encouraging results in on-land exoskeleton control. Zhanget al. [21] have designed a human-in-the-loop control strategy for an ankle exoskeleton and reduced the energy consumption by 24% over walking without an exoskeleton. Dinget al. [22] have designed a human-in-theloop hip exoskeleton control strategy and achieved 17%walking energy consumption reduction. Weiet al. [78] have developed a human-in-the-loop controller that helps the gait rehabilitation of patients with hemiplegia. Existing work has revealed that human-machine cooperative control can be an effective method to realize human land motion assistance.Thus, it has the potential to play a role in underwater motion assistance.
Some extensions to human-in-the-loop control should improve the control effect of underwater exoskeletons. The human brain can handle complex situations that require much computing and decision making. The control of an underwater exoskeleton can mimic a human brain. Fuzzy logic can be used to imitate the way people solve problems under uncertain, ambiguous, noisy, and even incomplete input information [79]. Karakose [80] has designed a nonstationary fuzzy controller for a weight lifting robot. The controller is simple, effective, and robust, and has been verified via human-in-the-loop simulation. Evolutionary computation mimics the natural evolution to do decision making, which can help optimization in multiple constraints of exoskeleton feedback control [81]. A neural network can also imitate the way in which human beings solve problems, which has played a role together with human-in-the-loop control for a robotic system [82]. Human-in-the-loop can thus benefit underwater exoskeleton control. The research progress in the field of artificial intelligence [83]-[87] would potentially facilitate this emerging underwater exoskeleton field, despite that this technology has a long way to go.
V. CONCLUSION
In this paper, we have presented a survey of existing work regarding underwater exoskeletons for human underwater movement assistance, and analyzed their actuation, sensing,modeling and control. Their conceptual design, rigid version,and soft one have been studied, and potential future directions for them have been discussed. Human underwater movement assistance is of great importance for underwater operators and frogmen. Currently little progress has been made to solve the challenges and issues for them, and much work remains to be done. Future research should focus on developing novel wearable robotic structures for underwater motion assistance,exploiting advanced sensors and data fusion algorithms for underwater environment and human intention perception,building up in-depth models and exploring human-in-the-loop control of underwater exoskeletons.
 IEEE/CAA Journal of Automatica Sinica2022年6期
IEEE/CAA Journal of Automatica Sinica2022年6期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Exponential Continuous Non-Parametric Neural Identifier With Predefined Convergence Velocity
- Exploring Image Generation for UAV Change Detection
- A Scalable Adaptive Approach to Multi-Vehicle Formation Control with Obstacle Avoidance
- Fuzzy Set-Membership Filtering for Discrete-Time Nonlinear Systems
- Distributed Fault-Tolerant Consensus Tracking of Multi-Agent Systems Under Cyber-Attacks
- Adaptive Control With Guaranteed Transient Behavior and Zero Steady-State Error for Systems With Time-Varying Parameters