巡检机器人在变电站运维中的应用
2022-06-24 06:53蔡志全邢婷婷
冶金动力 2022年3期
蔡志全,张 晶,邢婷婷
(唐山工业职业技术学院,河北唐山 063200)
引言
变电站作为电力枢纽站,不仅是电力电气设备的中心,还是电力能量的转换站,所以在供配电系统中占据着重要的地位。常规变电站的点巡检工作由变电站值班员负责,因不同值班员的业务能力、责任心等存在着差异,这样不仅会因人为因素的存在造成点巡检标准执行不统一,还会造成漏检、错检现象的发生,所以最终呈现的点巡检结果会出现误差甚至是错误。
随着智能变电站技术的不断发展,变电站的运维管理模式也发生了变化[1],无人化是变电站发展的大趋势。为实现变电站的无人化管理,巡检机器人的应用使得问题得到了解决。使用巡检机器人不仅能够克服人为点巡检存在的诸多弊端,还能够解放人力资源,丰富点巡检内容,为变电站无人化实现提供解决方案。巡检机器人的使用,还可以实现信息的实时上传与共享,所以采用巡检机器人有明显的优势。
1 变电站巡检需求
变电站巡检工作以站内一次设备为重点对象开展,主要巡检设备有:变压器、隔离开关、断路器、互感器、避雷器、母线、电容器、电抗器等[2],其主要目的就是通过巡检及时发现设备缺陷,以避免设备状况的进一步恶化。巡检任务主要有表计信息的抄录,状态指示信号的识别,设备本体放电和温度检测,变压器油位读取,设备运行噪声辨识,设备外观检测,隔离开关和刀闸位置检测,环境温度湿度检测。
机器人代替人工进行巡检,应具备人工巡检所具有的基本功能,能够精准地对设备进行“望闻问切”。巡检机器人首先要有自主导航功能,根据预定轨迹移动或自主规划移动路径,在移动过程中准确地识别被检设备与障碍物;其次,巡检机器人可针对被检设备的刀闸、断路器位置、触点温度、局部放电、仪表显示、运行声音及振动等状态进行监测与扫描及信息提取;最后,巡检机器人能够实现良好的人机互动,具备丰富完善的信息框架,可实现巡检全过程的智能化管理,支持实时数据在线分析与决策处理。巡检机器人将所采集信息进行归纳整理,能够依据设定的报警等级进行相应的报警显示,还可方便地将信息上传到上级平台。
2 机器人系统架构
智能巡检机器人系统整体由巡检机器人本体及后台监控系统组成(见图1),从下到上共分为三层:终端层、基站层和集控层。
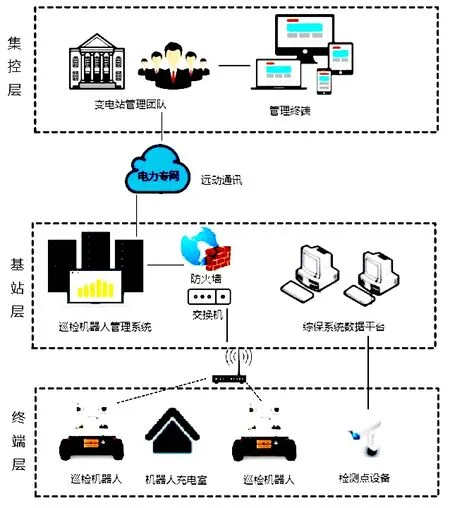
图1 巡检机器人系统架构
终端层由智能巡检机器人、机器人配套充电室和固定的检测点设备组成。该层是整个系统的最底层也是最重要的部分,借助机器人完成各项预定指令。根据巡检内容的要求,巡检机器人可进行精准定位,还能够完成现场设备识别,状态量采集和通信等。终端层的机器人充电室能够实现巡检机器人的自主充电工作,现场的监测点设备为变电站现场管理提供在线视频支持。
基站层由机器人后台监控系统、硬盘录像机[3]、防火墙及基站系统和部分外部系统组成,该层负责终端层与集控层的信息传递与交换。该层主要为机器人和其他平台提供数据交换功能,是重要的通信桥梁,将机器人采集到的各数据信息进行运算处理,以及数据加密处理上传到集控层。
集控层为远程集控管理,提供可视化的管理的终端平台。该层主要为运维管理团队提供良好的数据接口,在该层可以实现点巡检数据等信息的显示,报表导出,提取报警信息等。
3 巡检机器人功能
变电站巡检人员的日常点巡检工作依据点巡检标准进行,遵循巡检周期、时间、路线、项次等内容要求。使用巡检机器人代替人工,机器人也必须具备人工点巡检的功能,借助智能化高科技手段的优势丰富巡检。
3.1 自主导航及多巡检模式
变电站巡检机器人具备全天候巡检功能,集成激光雷达、深度相机[4]和超声波传感器等,实现点巡检过程中的精准定位、智能导航和立体避障。机器人具备自主巡检、定点巡检和遥控巡检功能,运行人员选择具体设备进行点巡检时,机器人能够自动优化巡检路线。巡检机器人可在恶劣环境下有效地开展点巡检,借助路径规划和避障功能确保设备以及人员的安全。当变电站因检修施工等环境有变化时,机器人能够自主学习与校正,实现外界变化对全局的影响最小化。机器人能够实时监测电量情况,根据续航情况实现自动充电,以满足日常的工作可以在无人化前提下进行。
3.2 局放及红外检测
巡检机器人搭载暂态低电压检测、超声波检测传感器、热成像仪(见图2)和拾音器,实现设备的一体化检测,准确识别变电站内配电柜的局部放电现象,生成设备的红外成像信息,拾取设备的运行声音数据,针对异常检测信息和故障信息进行报警。

图2 红外热成像图
机器人伸缩机械臂具备升降功能,可将搭载的检测设备提升至高处的观测点,实现全程无死角检测。
3.3 仪表及开关状态识别
巡检机器人搭载有高清摄像机,通过图像处理算法对站内配电柜上的各类仪表识别、捕捉,可以对指针式仪表、数字式仪表等全部实现自动识别,并提取有效的状态信息。该相机还对变电站设备上的指示灯、刀闸位置指示、运行工作状态指示等信息进行采集,捕捉到的高清图像通过图像处理算法实现自动识别。
3.4 环境监测
巡检机器人配备有多种先进数据采集传感器,提供温度、湿度、PM2.5、风速等多种变电站环境的数据监测,实时检测变电站工作环境的安全隐患。
3.5 本地监控系统
巡检机器人的日常管理、巡检任务管理、实时监控、巡检结果分析、用户设置[5]、机器人系统调试维护、智能告警等功能由本地管理系统负责。
(1)机器人管理:机器人管理模块主要为了实现一站多台机器人之间的选择切换,子功能模块包括站内所有机器人。
(2)任务管理:包括全面巡检、局部放电专项巡检、自定义巡检及任务展示功能模块[6]。
(3)实时监控:包括巡检监控和机器人控制功能。
(4)巡检结果分析:包含巡检结果浏览、巡检报告生成、对比分析功能,见图3。
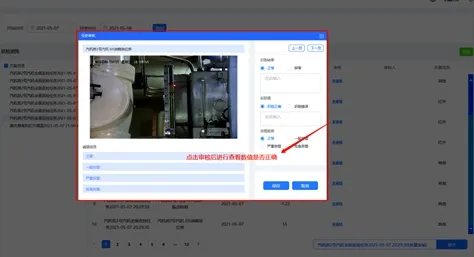
图3 巡检结果浏览
(5)用户设置:包含告警阈值设置、权限管理和巡检点位设置功能。
(6)机器人系统调试维护:包含软件设置、机器人设置功能。
(7)智能告警:根据设置的告警阈值,为用户提供各种采集数据的异常状况告警[7]。智能化告警,分级管理,多种上报方式可供组合选择。
通过后台浏览器网址进入机器人管控界面,进入实时监控里面的任务模式,在界面右侧显示为机器人实时监测图像(见图4),上面为可见光高清图像,下面是红外热成像仪图像。左侧总体大致分为四层分别为:气体检测和红外测温实时信息、机器人本体模块状态、机器人地图、实时信息和实时告警信息。
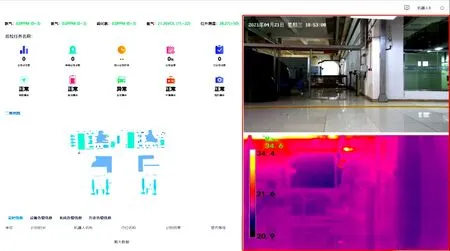
图4 机器人的实时监控操作
4 结语
变电站巡检机器人的使用,是推进变电站无人化的一项重要举措。针对变电站点巡检的智能化需求,变电站巡检机器人必定会凭借其自身优点在电力行业中得到大规模的应用。虽然变电站巡检机器人的推广和使用切实提高了点巡检工作的效率,能够达到基本的使用要求,但是巡检机器人的路径规划和图像解析仍然存在定位不准,用时过长等问题,这也是今后研究的重点。在第四次工业革命的背景下,不断涌现的各项新技术将融合到机器人及其管理平台中,届时将进一步提高机器人的智能化水平,为变电站提供更加安全可靠的服务。
猜你喜欢
疯狂英语·新读写(2021年10期)2021-12-07
新世纪智能(英语备考)(2019年4期)2019-06-26
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
体育科研(2014年5期)2014-04-16
有色金属设计(2014年4期)2014-03-11