
输电线路防冰/除冰机器人样机研制
2022-06-24 13:37:16余飞虎鲁彩江华强谢云鹏
机械制造与自动化 2022年3期
余飞虎,鲁彩江,华强,谢云鹏
(西南交通大学 a. 机械工程学院; b. 轨道交通运维技术与装备四川省重点实验室,四川 成都 610031)
0 引言
输电线路覆冰和积雪极易引发安全事故,这在全国甚至全世界范围内,每年都会造成电力系统的巨大损失,并对其安全运行有着巨大的威胁。因此,对覆冰输电线路进行除冰作业可降低电网损失。但使用人工除冰存在除冰不及时、不安全和效率低的缺点,同时还存在线路覆冰时间和覆冰程度不易知晓等问题。采用机器人除冰在能耗、成本及安全性等方面具有优势。但目前使用机器人除冰,首先需要人工上线清除导线上一部分覆冰,然后将除冰机器人放在导线上进行除冰作业。这种机器人的缺陷是除冰不及时、结构质量大、作业时间短[1-4]。
针对以上当前输电线路除冰作业面临的问题,在分析国内外除冰机器人发展状况的基础上,本文基于“防冰为主,除冰为辅”的创新理念,提出一种输电线路防冰/除冰机器人[5-7],研制了样机并进行实验验证。将机器人在冰期来临前期挂上线,利用其搭载的各类传感器,实时监测输电线路局部气象情况及附着在线上的水、霜、冰雪等的形态变化过程,可以较好地弥补人工观冰的不足。防冰装置及时去除输电线路上凝结的冷却水滴和附着的霜雪,将覆冰扼杀在摇篮中;同时,在覆冰程度较轻时,用除冰机构及时除冰,提高效率;并且将监测的线路情况通过无线传输装置,把监测数据实时传回监控中心[8-9],使监控人员可实时远程监控线路局部状况和远程控制机器人工作。
1 总体设计
输电线路防冰/除冰机器人整体由环境感知系统、控制系统、机械执行部分和供电系统4部分组成,如图1所示。其中:环境感知系统主要由多个传感器构成,包括摄像头、微气象站、红外测温仪和测厚光栅;控制系统包括地面监控端、机器人本体相关控制元件和软件系统;机械执行部分包括行走轮、夹紧机构、除冰机构、防冰机构以及内置摄像头开窗机构;供电系统包括可充电电源和自取电装置。通过这4部分的协调工作,实现机器人在线实时监测线路状况。当线路出现覆冰征兆时,可及时启动防冰和除冰功能,以减缓甚至避免线路出现严重覆冰,达到减轻甚至消除输电线路冰冻灾害的目的。

图1 输电线路防冰/除冰机器人整体组成部分
输电线路防冰/除冰机器人样机的主要技术指标如表1所示。

表1 技术参数指标
2 机械系统设计
2.1 机器人整体结构
根据机器人所需功能,平衡每个功能的性能需求和相互之间的限制,最终确定的输电线路防冰/除冰机器人的整体结构设计如图2所示。
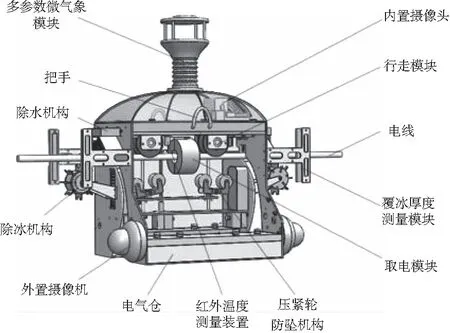
图2 输电线路防冰/除冰机器人整体结构
2.2 行走防坠机构设计及力学分析
1)行走防坠机构设计
目前单体除冰机器人的上下线都从侧边进出,采用的是“L”型进线槽的进线方式。因实际输电线路为弧形,所以此种方式不利于机器人上下线。在分析对比后,将机器人进线方向确定在机器人下方,如图3所示。这种上下线方式即可方便人工操作,也可实现无人机吊装作业。
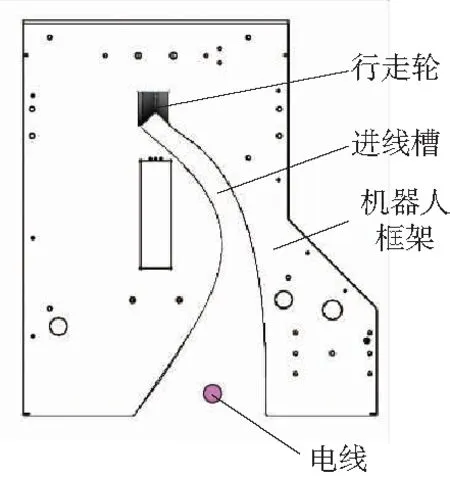
图3 机器人上下线方式
输电线路机器人的行走方式主要有爬行和轮式行走两种。由于轮式行走具有结构简单、前进速度快等优点[10],因此本机器人采用轮式行走机构。如图4所示,上方两个行走轮,采用独立驱动,每个行走轮下方配置一组压紧轮。压紧轮采用独立悬挂方式,一个丝杆模组机构可控制两组压紧轮同时上下移动,构成行走防坠机构。

图4 行走防坠机构示意图
2)爬坡状态力学分析
根据机器人的结构设计,机器人爬坡状态力学分析[11]如图5所示。

图5 爬坡状态受力分析
图5中:f′为滚动摩擦力;f为静摩擦力;M为电机提供的转矩;G为机器人整体所受重力;F1为牵引力;F2为压紧力;θ为电线倾角。
设μ1、μ2分别为电线与行走轮之间的静摩擦因数和滚动摩擦因数。机器人能在线上保持静止状态时需满足条件为
μ1F2≥Gsinθ-μ1Gcosθ
(1)
在驱动电机驱动转矩足够的情况下,行走轮不打滑的条件[12]为
(2)
式中:
(3)
(4)
一般地,μ1>μ2,因此,根据式(2)-式(4),得
(5)
从式(5)可看出,只要提供满足此式的压紧力,则行走轮可以避免打滑。
机器人在不打滑情况下,可以向上运行的条件为
F1>μ1(Gcosθ+F2)+Gsinθ
(6)
在实际情况中,滚动摩擦力远小于滑动摩擦力,因此可不计滚动摩擦因数。根据设计的技术指标以及式(5)和式(6),利用Matlab计算并作出行走轮避免打滑所需压紧力与线路坡度的关系和机器人运动所需驱动力与线路坡度的关系,如图6所示。
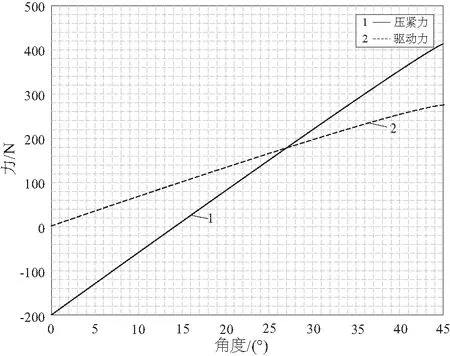
图6 压紧力和驱动力与线路坡度的关系
3)行走轮接触力学分析
行走轮采用V形槽设计,可以适应线路的不同直径变化,较U形槽设计有更好的摩擦力,防滑效果更好[13],其与电线的接触力学分析如图7所示。
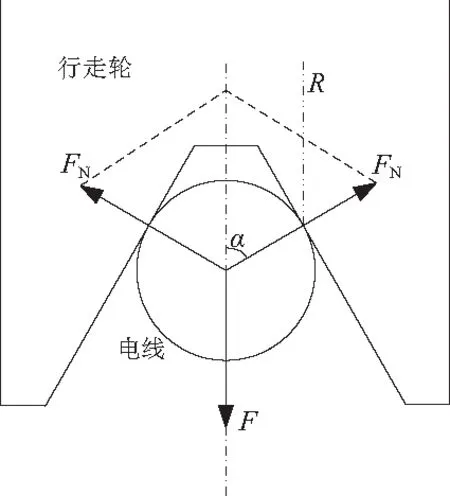
图7 行走轮接触受力分析
图7中F为机器人对电线的压力,FN为支撑力,α为包角。由式(5)得出行走轮打滑与压紧力有关。因此,为使提供的压紧力满足防滑需求,需合理设计包角α。
由三角形余弦定理得
(7)
支撑力FN与摩擦力有关,摩擦力太小易出现打滑现象,摩擦力太大需增加驱动力。因此,要使机器人在不打滑状态下可以正常行驶,从式(7)可知,当取α=60°时,F=FN,此时可获得最佳的摩擦力,同时也可满足可适应不同线径的要求。
从图6知,在爬行坡度45°时,需要280 N的驱动力。由图7知设计的行走轮与电线接触半径R=36mm。因此由
(8)
得出所需电机驱动转矩M=5.04 N。
2.3 防冰机构设计
在线路检测有霜、露、水、雪等的情况下,及时开启防冰机构进行作业,如图8所示。
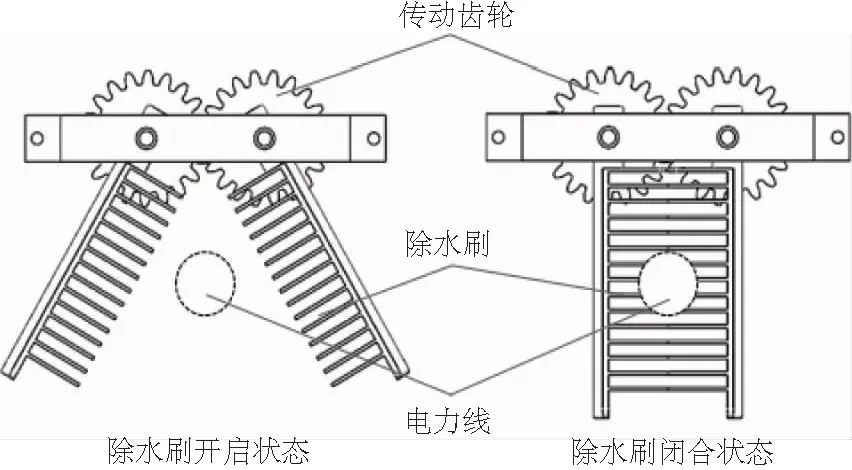
图8 防冰机构示意图
该装置主要由左右两边可以开合的除水刷组成。除水刷由硅胶开模制成,转动传动齿轮,除水刷随之旋转闭合,齿状刷子接触电线并由于自身柔性,可自适应包裹在电线上,形成对电线的包裹状态。随着机器人往前行走,完成作业,减缓、减轻线路覆冰形成。
2.4 除冰机构设计
除冰采用铣削除冰方式[14]。除冰刀设计成和导线直径相等的圆弧形,更换与线径相对应的除冰刀,便可适应不同线径作业。在丝杆模组电机作用下使除冰刀上下移动,调节除冰刀与电线的距离,防止除冰刀刮伤电线。轮毂电机为除冰刀提供足够旋转速度,既可提高早期非坚硬覆冰的除冰速度和效果,也可除掉快速形成的坚冰,从而抑制覆冰的形成速度。除冰机构如图9所示。

图9 除冰机构示意图
3 控制系统与电源系统设计
输电线路防冰/除冰机器人控制系统包括地面监控端和机器人本体两部分,如图10所示。
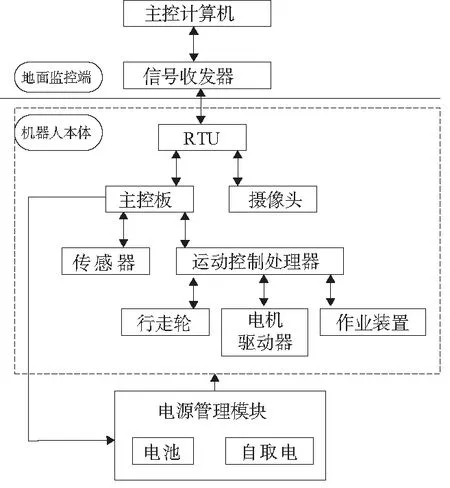
图10 输电线路防冰/除冰机器人控制系统示意图
3.1 运动作业控制和数据传输系统
为了实现机器人在输电线路上稳定行走、环境检测、预防作业及除冰作业等功能,本机器人控制系统基于ARM Cortex M4架构开发的微控制器STM32F427作为嵌入式微控制器,利用上位机与下位机之间的无线通信实现对机器人的遥控操作[15-16]。MCU能够对传感器输入的数据进行判断来控制各部分的运行,实现自主控制运行,同时将数据传给RTU,由RTU将采集数据发送回监控中心。通过RTU实现传感器数据和遥控指令双向传输,其中设置远程遥控为第一优先级。
3.2 电源系统
输电线路防冰/除冰机器人上搭载相关检测传感器和通信设备,必要的情况下进行主动防冰和除冰措施,因此机器人能源消耗较大。由于机器人悬挂在野外输电线上,运行过程中如果需要频繁更换电池,会消耗大量的人力、物力,不利于机器人的广泛应用。
为解决机器人的能源问题,采用高压架空输电线路自取电及智能电池充电一体化管理系统[17]。本系统可以将高压架空输电导线周围的磁能转化为电能,直接为外接负载供电,而且机器人带有备用充电锂电池。即使线路停电,装置内部的备用锂电池也能保证较长时间的不间断供电,可以解决因电池无法长期供电影响机器人作业的问题。输电线路防冰/除冰机器人电源管理系统如图11所示。

图11 输电线路防冰除冰机器人电源管理系统
4 环境感知系统设计
传感器是实现机器人在线智能化作业的重要组成部分之一,其性能的好坏直接决定了主动防冰除冰的效果。此机器人采用了六要素超声波一体微型气象站、测量光栅、非接触式红外测温仪以及摄像头等设备。
微型气象站可以同时测量风速、风向、温度、湿度、大气压力和雨量等6种气象数据。将气象站安装在机器人顶部,可以随机器人在线上移动,测出整条线路的局部气象数据;非接触式红外测温仪的作用是测量输电线路的温度。测量光栅的目的是测量电线的覆冰厚度,其作用是为除冰预警提供准确点覆冰厚度数据;摄像头的目的是为图像处理系统提供清晰的视频和图片。
监控中心显示界面如图12所示。
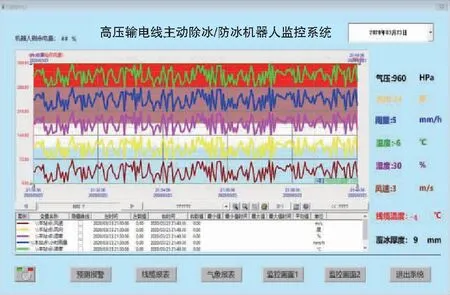
图12 环境感知系统监控中心显示界面
5 样机研制与试验
本文设计的输电线路防冰/除冰机器人实验样机在线运行状态如图13所示。

图13 试验样机
通过对样机的试验表明:
1)机器人可以在线路上正常运行,对线路弧度具有很好的适应性,最大上行坡度45°;
2)人工作用下,机器人可以轻松地上下线;
3)防冰、除冰功能可以正常作业;
4)各传感器在机器人移动时能够正常运行,实现采集的数据传回监控中心进行显示和存储;
5)机器人可以适应10~20mm线径的线路运行,并进行相关工作。
6 结语
输电线路除冰机器人较人工除冰有作业安全、效率高等优点。本文设计的防冰/除冰机器人在分析目前相关机器人的基础上,对机器人整体机械结构、控制系统、环境感知系统和数据传输系统进行了详细的设计与制作,并进行了在线运行,测试其稳定性、机动作业效果等各功能指标。结果表明:机器人运行正常;各功能均达到预期要求;可以实现对输电线路进行监测和防冰/除冰作业。
猜你喜欢
建材发展导向(2019年5期)2019-09-09 09:25:10
娃娃乐园·综合智能(2019年6期)2019-07-10 00:37:32
意林·全彩Color(2018年9期)2018-10-12 01:07:08
电子制作(2018年12期)2018-08-01 00:48:08
创新作文(小学版)(2016年13期)2016-11-11 05:46:29
红蜻蜓·低年级(2015年10期)2016-01-26 10:55:28
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
