
基于遗传算法的主动径向转向架动力学优化
2022-06-24 13:37:10肖权益池茂儒梁树林
机械制造与自动化 2022年3期
肖权益,池茂儒,梁树林
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
0 引言
目前,我国正处于城市轨道交通系统发展的黄金时期,随着铁道车辆设备的不断升级以及为了进一步提升地铁车辆在复杂线路条件下的适应性,主动径向技术越来越受到关注。主动径向转向架不仅可以解决传统转向架曲线通过性与直线稳定性的矛盾,同时还可以大大改善地铁车辆由于小半径曲线多而磨耗加剧的问题。因此,深入研究主动径向转向架车辆动力学性能具有十分重要的理论和实际工程意义。
由于主动径向技术带来的巨大效益,国内外学者针对主动径向转向架开展了一系列的研究。FU B等[1]从车轮磨损的角度出发对不同径向控制策略下的车轮磨耗进行了长期迭代预测分析;FARHAT N等[2]认为通过曲线时,当前后轮对横向蠕滑力相等且纵向蠕滑力为0时主动径向转向架导向性能更好,并研究了不同主动径向策略下的动力学性能;PEREZ J等[3]提出了纯滚线轮对横移控制、轮对相对摇头角控制以及轮对摇头力矩控制三种控制策略;沈钢和赵惠祥[4]基于纵向蠕滑力为0的设想提出了一种对轮对施加摇头力矩闭环控制的主动径向转向架;王乾等[5]对下一代地铁径向转向架控制系统进行了研究,并提出利用地面信标和回转角传感器获取控制信号的两种方案。
以上研究在主动径向转向架的控制策略方面做了大量工作,而对动力学参数匹配方面的研究却非常少。实际上,采用主动径向技术在解决稳定性和曲线通过性矛盾的同时,也给动力学的优化提供了空间。遗传算法在解决非线性、多目标等复杂问题时有着良好的表现,且在铁道车辆领域实际应用中也取得了一定的效果[6-7]。因此,本文采用自适应遗传算法对地铁车辆主动径向转向架开展多参数多目标优化,以期进一步全面提升车辆的动力学性能。
1 主动径向转向架原理
主动径向转向架其导向原理是根据轮对通过曲线的姿态,借助安装在转向架上的作动执行机构实时驱动轮对,迫使轮对呈外八字形展开而处于径向位置。本文所研究的主动径向转向架的主要结构是在轮对两侧各纵向布置一个作动器,作动器一端连接轴箱,另一端连接构架。通过曲线时,曲线外侧作动器活塞杆伸出,曲线内侧作动器活塞杆缩回,从而迫使轮对趋于径向。
以往学者大多从理论研究角度出发采用基于蠕滑力或者基于纯滚线的控制方法,然而实际上对蠕滑力、轮对横移以及等效锥度等信息的实时测量仍然存在很大难度,目前只能运用卡尔曼滤波方法并借助大量传感器估计得到数据。因此,本文从工程应用化角度出发,采用基于位移闭环的相对摇头角控制策略,示意图如图1所示。其中作动器在曲线上实时控制位移为
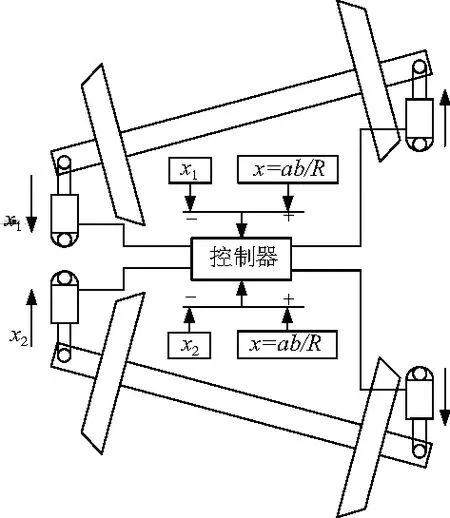
图1 主动径向控制策略示意图
(1)
式中:a为作动器横向跨距之半;b为车辆轴距之半;R为曲线半径。
由上述可知,为了实现径向转向架的主动控制,就必须知道线路的实时曲率半径。本文采取在头车布置二系回转角传感器的方式来获取控制输入信号,感知曲率半径公式[8]为
(2)
式中:ρ为一位转向架实时线路曲率;d为车辆定距;φA、φB分别为一位、二位转向架与车体的相对回转角;ν为车辆运行速度。
2 主动径向转向架联合仿真模型建立
考虑到结合伺服电机和液压技术的电液作动器依靠液压油的可压缩性可以适应具有强烈振动的转向架工作场景,同时具有质量轻、体积小、便于一体化的优点,本文采用电液式作动器作为主动径向控制系统的执行器。电液作动器系统原理图如图2所示,其主要工作原理是计算机输入控制指令信号给伺服电机驱动器,驱动并控制电机的转速和转矩进而控制液压泵输出油量来推动液压缸活塞杆输出位移,与此同时计算机根据传感器反馈信号不断调节活塞杆的输出位移。

图2 电液作动器系统原理图
电液作动器的液压泵流量方程、液压缸流量连续性方程、液压缸和负载的力平衡方程为:
Qp=Dpωp-CpPL
(3)
(4)
ApPL=mts2Xp+BpsXp+kXp+FL
(5)
式中:Qp为液压泵输出流量;Dp为液压泵排量;ωp为液压泵角速度;Cp为液压泵总泄漏系数;PL为负载压力;QL为液压缸负载流量;Ap为液压缸有效作用面积;Xp为作动器输出位移;Ct为液压缸总泄漏系数;V0为系统总压缩容积;βe为油液有效体积弹性模量;mt为活塞上的总质量;Bp为总黏性阻尼系数;K为负载刚度;FL为活塞上的负载力。
由于铁道车辆曲线由缓和曲线和圆曲线构成,故作动器输出位移存在明显的加速段、匀速段以及减速段。所以为了减小作动器时滞对主动径向转向架影响,在采用PID位移闭环控制的基础上添加基于速度的前馈开环控制以补偿定量泵的转速,其控制传递函数框图如图3所示。

图3 作动器控制传递函数框图
同时,基于SIMPACK多体动力学仿真软件建立主动转向架地铁车辆动力学模型,其中车辆采用LM踏面,钢轨采用CN60轨,建模过程充分考虑悬挂系统和轮轨接触的非线性特性。随后建立主动径向转向架的联合仿真模型,仿真流程如图4所示。

图4 联合仿真流程
为清晰地反映主动径向转向架的径向效果,对比分析了不同车辆以均衡速度通过无轨道激励500 m曲线半径时的一位转向架各轮对的横移量、冲角以及磨耗功。如图5-图7所示,采用传统转向架通过曲线时,其导向轮冲角、磨耗功以及轮对横移明显大于非导向轮,这是由于传统转向架的大一系定位刚度限制了蠕滑力的导向效果。相对于传统转向架,主动径向转向架通过直接给轮对施加摇头力矩,使得导向轮轮缘不再贴靠钢轨,前后轮对朝纯滚线横移以具有一个较好的曲线通过姿态。在500 m曲线半径上,导向轮在圆曲线上的冲角由3.71 mrad降为0.07 mrad,降幅达98%,轮对已基本处于完全径向位置。由于冲角的显著降低,轮对磨耗也得到大幅改善。

图5 轮对横移量
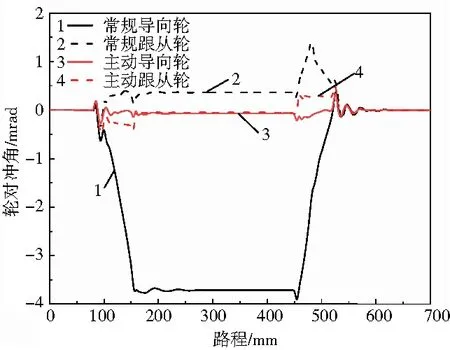
图6 轮对冲角
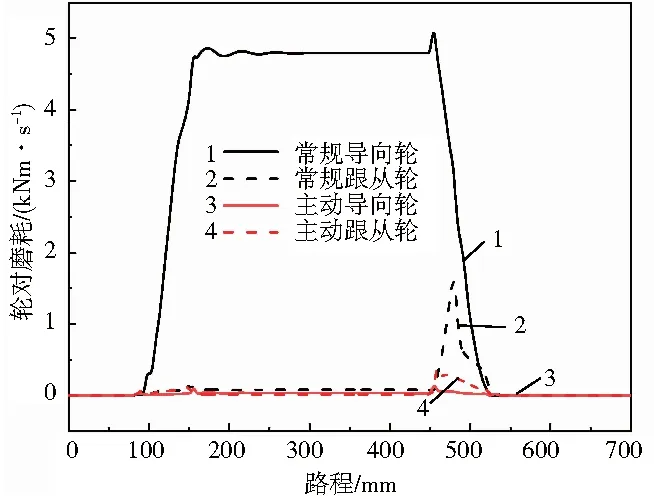
图7 轮对磨耗
3 基于自适应遗传算法的动力学优化
铁道车辆动力学主要取决于轮轨和悬挂参数的合理匹配,因此进行参数优化是动力学研究的重点。然而,传统的优化设计方法仅仅是针对单一参数进行单一目标的优化。实际上,不同参数间存在着明显的交互耦合作用,因此本文采用自适应遗传算法进行多参数多目标优化。
3.1 自适应遗传算法原理
遗传算法是借鉴进化学和群体遗传学理论而发展出来的一种用于解决系统最优化的搜索算法,其核心思想是模拟自然种群的进化过程,通过选择、交叉以及变异等遗传规则,在每一子代都保留更为适应环境的个体,使种群朝着适应度高的方向进化,从而种群在不断迭代后收敛到所求问题的最优解。然而传统遗传算法存在着早熟、可靠性低以及收敛慢的缺点[9],其交叉概率和变异概率都需根据经验预先选取,而不会随着迭代过程变化,难以在维护群体多样性的同时保证算法的收敛性。因此,本文根据适应度的大小采用自适应交叉与变异算子,其公式如下:
(6)
(7)
式中:f为要交叉的两个体较大的适应度;favg为种群个体的平均适应度;fmax为种群个体的最大适应度;Pc和Pm分别为交叉和变异概率。
同时引进小生境技术,优化时将每代个体分为不同类别,再对比每类个体的适应度,选出适应值高的个体作为此类的代表并组成群,随后在种群中以及不同种群间开展遗传算子操作以生成下一代种群。此外,为进一步提高搜索全局最优解的能力,设置动态的小生境海明距离并采用格雷码编码和精英保留策略[7]。
3.2 计算流程及参数优化结果
根据自适应遗传算法对主动径向转向架进行多目标动力学优化,选取对动力学灵敏度较高的作动器节点径向刚度Kpx2、一系横向定位刚度Kpy、二系横向减振器阻尼Csy、二系空簧横向刚度Ksy、二系垂向减振器阻尼Csz、二系空簧垂向刚度Ksz共6个参数进行多参数优化。
考虑铁道车辆稳定性、平稳性和曲线通过性三大动力学性能,同时将各性能指标进行归一化处理后再进行线性加权,从而将多目标优化问题转换为单目标优化问题。在计算目标函数时,为兼顾车辆服役性能,分别考虑了低锥度和高锥度两种轮轨关系的动力学模型,同时对其动力学指标各赋予50%的权重。此外,本文在保证临界速度的同时,将构架横向稳定性、平稳性和曲线通过性认为同等重要,并分别为其赋予相同的权重。在此基础上,将平稳性进一步细化为横向平稳性和垂向平稳性并赋予同等权重,将曲线通过性进一步细化为轮轨横向力、轮轨垂向力和轮轨磨耗并赋予同等权重。基于上述计算原则并设置一定约束条件,得到优化问题的目标函数:
(8)
式中:OP为优化使用的评价函数值;Aby1为新轮和磨耗轮构架横向加速度滤波后的均方根加权归一化值;Wy1、Wz1分别为横向平稳性、垂向平稳性的加权归一化值;Q1、P1、W1分别为轮轨垂向力、轮轨横向力以及轮轨磨耗功的加权归一化值;Vcr为临界速度;H为轮轴横向力。
基于自适应遗传算法的主动径向转向架动力学优化计算流程图如图8所示。设置初始种群个体数为60,迭代数为20代,精英个体数为6个,初始交叉和变异概率分别为0.6和0.05以进行遗传算法的计算。目标函数最小值随着迭代次数的变化如图9所示,从图9中可以看出,子代最优解随着迭代次数逐渐变好,优化效果明显。选取末代最优个体作为最终参数优化值,参数如表1所示。
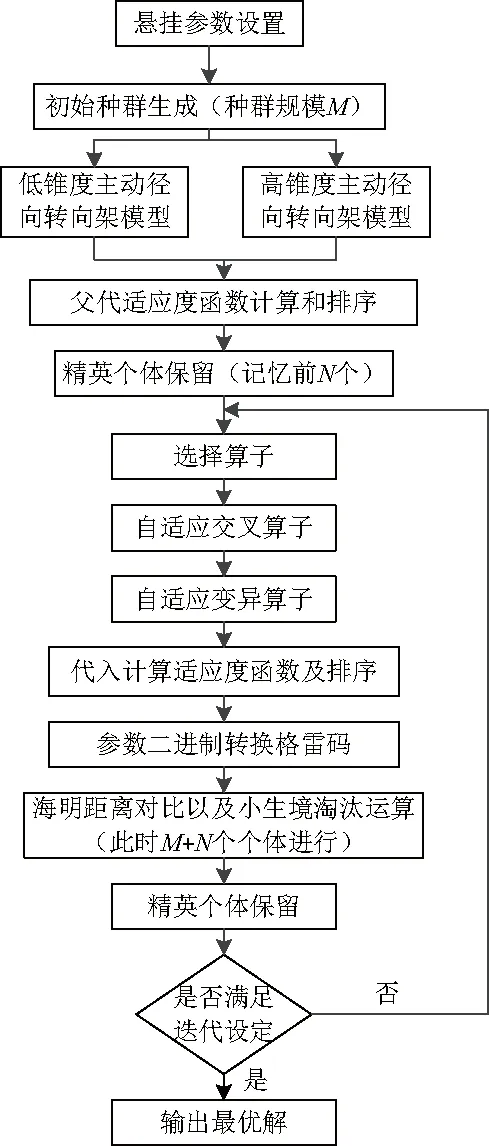
图8 自适应遗传算法优化流程图
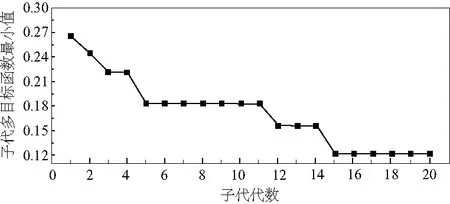
图9 子代目标函数最优值变化

表1 优化前后悬挂参数
4 优化前后动力学性能对比分析
为验证遗传算法的优化效果,对比分析了传统、主动(优化前)、主动(优化后)3种转向架的横向平稳性和曲线通过性,线路施加美国五级谱。图10-图11分别为车辆横向平稳性和垂向平稳性。由图可知,3种转向架平稳性指标均随速度的增大而增大,优化前主动径向转向架平稳性指标和传统转向架基本一致,而采用遗传算法优化后,无论是新轮还是磨耗轮的平稳性都得到了明显的改善。以120 km·h-1运行平稳性为例,优化后,新轮横向平稳性由2.08降为1.78,磨耗轮横向平稳性由2.37降为1.98;新轮垂向平稳性由2.01降为1.82,磨耗轮垂向平稳性由2.04降为1.80。
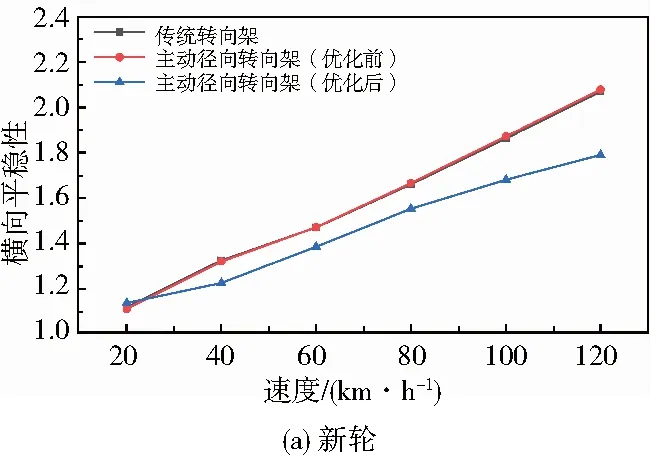
图10 横向平稳性

图11 垂向平稳性
图12所示为3种转向架以不同速度通过半径500 m时的轮轴横向力、轮轨垂向力、轮质量减载率、脱轨系数和整车磨耗功。从图中可以看出,相对于传统转向架,主动转向架可以明显提高各项曲线通过性指标,遗传算法优化参数后各项指标还能得到进一步提高。相对于传统转向架,优化参数后的主动径向转向架轮轴横向力可以改善约30%;轮质量减载改善约10%;脱轨系数改善约35%;磨耗改善约85%。
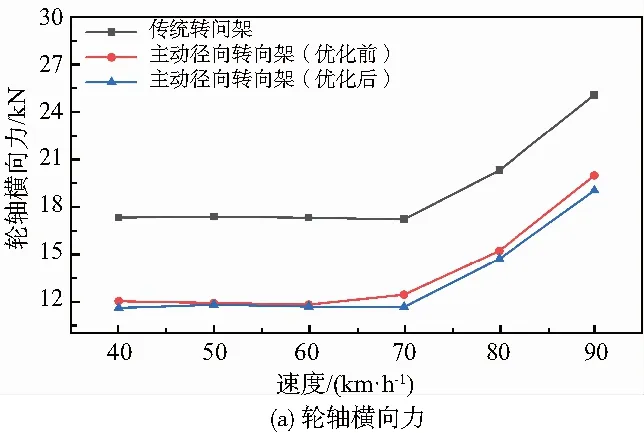
图12 R500曲线安全性
5 结语
本文通过建立地铁车辆主动径向转向架的联合仿真模型,验证了主动径向的径向效果,并利用自适应遗传算法对车辆动力学进行了多参数多目标的优化,得到如下结论:
1)相比传统转向架,主动径向转向架可以实时调整轮对通过曲线的姿态,显著提高车辆的曲线通过性,使得轮对冲角、轮轨磨耗、轮对横移量以及脱轨系数等各关键指标均得到大幅改善;
2)采用自适应遗传算法进行多目标优化可以较好地实现轮轨和悬挂参数的匹配,进一步改善车辆动力学性能,优化后各项动力学指标都优于原参数。以120 km·h-1运行平稳性为例,优化后,高锥度横向平稳性由2.37降为1.98,改善幅度约为16%;高锥度垂向平稳性由2.04降为1.80,改善幅度约为12%。
猜你喜欢
数学物理学报(2021年3期)2021-07-19 06:02:48
装备制造技术(2020年9期)2021-01-26 00:14:42
铁道通信信号(2020年10期)2020-02-07 01:01:02
工程与建设(2019年5期)2020-01-19 06:22:44
西安航空学院学报(2017年3期)2017-07-05 14:58:36
厦门理工学院学报(2016年1期)2016-12-01 04:50:40
北京航空航天大学学报(2016年2期)2016-12-01 03:00:27
铁道通信信号(2016年6期)2016-06-01 12:10:20
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25 03:00:30
中国铁道科学(2015年5期)2015-06-21 06:53:22
