基于基准站信噪比先验信息的GNSS观测数据多路径误差识别方法及应用
2022-06-24 04:50:24黄观文白正伟
地球科学与环境学报 2022年2期
刘 健,黄观文,杜 源,白正伟
(长安大学 地质工程与测绘学院,陕西 西安 710054)
0 引 言
全球卫星导航定位(Global Navigation Satellite System,GNSS)技术以其全天候、实时、高精度三维定位的特点逐渐成为形变监测的重要技术方法之一。目前,GNSS形变监测技术已在桥梁、建筑、尾矿、大坝等开阔领域得到成熟应用,但在地形地貌复杂的滑坡监测环境中仍存诸多不足。这主要是因为滑坡易发区往往处于高山峡谷、植被茂密的山区,GNSS信号传播过程中不可避免受到遮挡环境干扰,产生严重的多路径效应以及频繁的周跳现象,极大降低监测数据质量,导致GNSS模糊度固定困难,从而严重影响定位结果的可用性,甚至造成错误的灾害预警。
由于多路径效应与卫星相对于天线的空间位置、反射面反射特性、天线性能等均密切相关,在不同监测站间具有非空间相关性,所以很难建立准确的多路径误差改正模型对观测值进行改正,且通过现有差分技术也无法削弱其影响,使其成为影响GNSS滑坡监测的主要误差源。目前,多路径效应的削弱方法大致可以分为4个方面:①选取合适的监测站站址环境。汪东等研究指出灌木丛、树叶是复杂环境下多路径效应的主要来源。但是对于滑坡监测,根据实际监测需求,监测站站址的选取自主性较差,因此,从源头上削弱多路径效应具有很大的局限性。②改进接收机及天线性能,如采用右旋极化天线,加装抑径板和扼流圈天线,改进天线设计等。但这会额外增加接收机成本,且改进后的接收机体积大,不利于野外作业。③改进接收机内部信号处理方法,如窄相关器技术(Narrow Correlation Technology,NCT)、多路径削减技术(Multipath Estimation Technology,MET)、多路径削减延迟锁相环技术(Multipath Elimination Delay Lock Loop,MEDLL)等。但是这些技术对硬件性能要求较高,且计算量巨大,不利于推广。④数据后处理算法,受客观条件的约束较小,成本较低,且多路径效应抑制效果较好,被国内外学者广泛研究。代表性方法有信噪比法、多路径周日重复性方法、基于小波理论的算法以及自适应滤波器、经验模态分解(Empirical Mode Decomposition,EMD)等。Axelrad等利用多路径影响下卫星信噪比(Signal-to-noise Ratio,SNR)显著降低这一特性,自适应估计多径的频谱参数,以抑制多路径误差;针对长期静态观测中多路径误差的时间相关性,Bock等提出了一种基于恒星日滤波来提取和消除多路径误差的方法;李盈洲利用经验模态分解方法抑制GPS短基线差分中的多路径噪声,取得良好效果。但是这些算法较为复杂,且主要适用于数据后处理。针对复杂滑坡环境,Han等曾提出采用卫星方位角-高度角观测值构建监测站空间地形环境,即利用自适应截止高度角(Azimuth-dependent Elevation Mask,ADEM)模型剔除较差观测值,以削弱多路径影响,但该方法对监测站附近植被、人工设施影响的多路径效应应用效果不佳。
复杂滑坡环境下,严重的多路径效应会显著降低监测站观测数据质量,并最终影响监测精度。本文考虑到滑坡监测中基准站通常布设于开阔无遮挡环境,提出一种基准站信噪比信息辅助的观测数据多路径误差识别方法。该方法拟通过对基准站和监测站信噪比观测值作站间差分来识别剔除受环境干扰的较差观测数据,以抵御复杂监测环境所带来的多路径影响。
1 原理方法
1.1 观测数据剔除方法
卫星信号在传播过程中所受到的大气延迟、多路径衍射等误差,与卫星高度角密切相关。一般而言,卫星高度角越低,相关误差越大。因此,在数据处理时,传统处理方式通常会设置一个固定截止高度角,将低于该高度角阈值的卫星观测值作为粗差进行剔除,即传统固定截止高度角(Traditional Fixed Cut-off,TFC)模型。其剔除准则为
<
(1)
式中:表示接收机到卫星的高度角;表示固定截止高度角阈值。
上述传统处理方式仅仅适用于开阔观测环境,而对于地形起伏较大的复杂遮挡环境,存在较大弊端。这是由于复杂环境下,受地形影响质量较差的观测值并非全部分布于低高度角区域。此时,截止高度角设置过低,无法剔除大部分较差观测数据;反之,则会导致过多有效数据被视为粗差剔除。
当前,随着GNSS不断发展建设,可观测卫星数显著增多。Han等曾提出利用卫星高度角-方位角来构建监测站地形空间环境,根据方位自适应调节截止高度角,即ADEM模型。其主要思想为:卫星天空视图外围边界与地形线一致重合;卫星绕地球运动过程中,其升起和降落时会与地形线产生一个离散交点;多个离散交点可以拟合出一条地形曲线,用这条曲线代替卫星视图0°边界。其中,离散交点可以由卫星高度角、方位角观测信息得到。此时,基于空间地形方位的ADEM模型可表示为
=+
(2)
式中:表示基于地形方位的自适应卫星截止高度角;表示基于方位变化的地形线;表示需设置的截止高度角,用于剔除地形表面植被引起的较差观测值(一般设定为5°)。
观测值剔除准则为
<+
(3)
与传统的固定截止高度角模型相比,ADEM模型可以有效识别地形线附近较差观测值,显著提升复杂环境下数据利用率。但当监测区地形起伏较大或监测站周边存在其他人工建筑物、高大植被等障碍物时,该方法的应用还存在较大局限性。
1.2 基准站与监测站数据相关性
为了保证监测结果的可靠性与可用性,滑坡监测通常采用“一点一基站”模式,即在滑坡形变区域外布设一个基准站作为差分数据站。对基准站与监测站数据所受各项误差及其数据相关性进行分析,将有助于后续误差处理。
GNSS卫星信号从产生到被接收机接收,期间所受误差影响大致可分为卫星端相关误差、接收机端相关误差以及信号传播路径相关误差。非差非组合伪距和载波相位观测方程可表示为
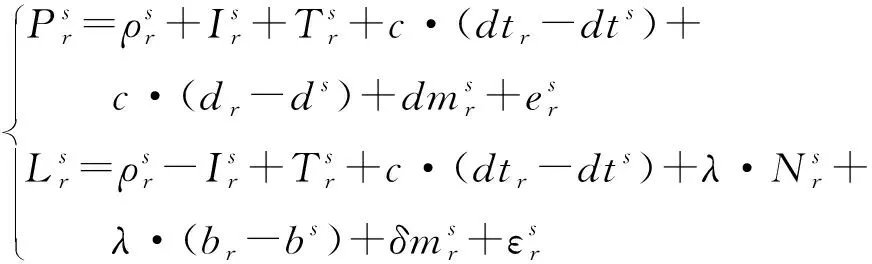
(4)

由于滑坡形变区域通常较小,基线距离一般只有数百米至千米,使得基准站和监测站所受大气延迟误差项近乎相同。通过接收机间、卫星间的双差,卫星端相关误差、接收机端相关误差、绝大部分大气延迟误差均可被有效消除。但是,受滑坡所处区域限制,监测特征点往往需要根据实际监测需求布设在滑坡体前缘或后缘,使得监测站周边环境极为复杂,信号往往被山体、植被等障碍物遮挡。而基准站则通常会选择在开阔无遮挡环境,避开高大建筑物、植被、水面等容易产生多路径效应的地物。观测环境的巨大差异,不仅使得监测点卫星可视范围骤减,也使得其所受多路径效应影响与基准站迥异。复杂遮挡环境下,监测站伪距多路径误差可达数米,且波动频率较高,远远高于基准站。由于多路径误差无法通过双差模型进行消除,往往会给滑坡监测结果造成严重影响。此外,在严重的多路径效应影响下,监测站数据发生周跳的频次也要远远高于基准站,且在空间域上分布不均。
信噪比作为表征接收机天线接收卫星信号质量的指标,其大小与卫星发射功率、接收机性能、天线性能、天线增益、监测站多路径效应、环境温度等众多因素密切相关。当硬件条件一定时,监测站多路径效应是影响信噪比观测值的最主要因素。其中,直射信号占主导趋势变化,反射信号呈现局部波动特征,因此,可采用多项式去趋势项提取多路径反射信号分量。
为验证信噪比与多路径效应的相关关系,以黑方台党川监测区HF02监测站C26卫星为例,观测时段为2022年年积日第4天第2 074~9 274秒共计7 200个历元。图1展示了信噪比多路径反射分量和L1/B1频点伪距多路径估值(MP1)的时间序列,红色代表多路径反射分量,蓝色代表MP1值。从图1可以发现,信噪比反射分量序列与MP1序列震荡变化趋势较为一致。图2为信噪比多路径反射分量和MP1值相关系数曲线,两者的相关系数在时间延迟1 s时达到最大值(0.64),为显著相关。

图1 信噪比多路径分量与MP1时间序列Fig.1 Multipath Component and Multipath MP1 Time Series of SNR
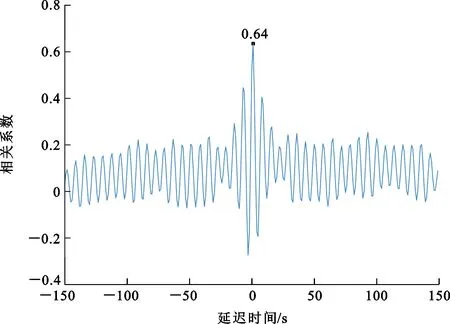
图2 信噪比多路径反射分量和多路径MP1值相关系数曲线Fig.2 Correlation Coefficient Curve of Multipath Component and Multipath MP1 of SNR
GNSS滑坡监测中,监测区域通常采用相同型号的接收机和高精度天线,且除多路径影响差异外,监测区内接收机所受外部环境相同。因此,基准站和监测站所受多路径影响差异均会被间接反映到相应的信噪比观测值中。
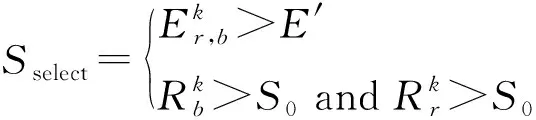
1.3 基于基准站信噪比先验信息的GNSS观测数据多路径误差识别方法

(5)

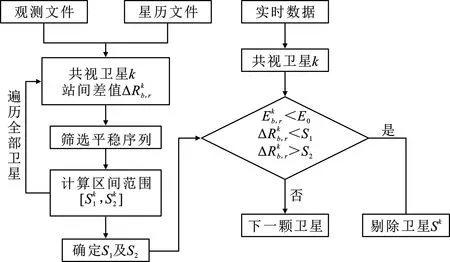
图3 数据处理流程Fig.3 Data Processing Flowsheet
(6)

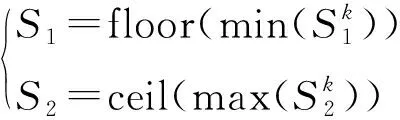
(7)
式中:floor表示向下取整;ceil表示向上取整。
最后,基于高度角、信噪比的观测数据剔除准则可表示为

(8)
在数据处理过程中,将满足上述准则的卫星观测数据标记为粗差进行剔除。
需要说明的是,该方法更适用于基准站和监测站接收机及天线类型均相同的条件下。当采用不同品牌接收机或者不同类型天线时,由于其抗多路径误差性能存在差异,计算的信噪比信息会存在一定的基准差异,可能会影响方法的改进效果,未来需进一步测试分析。
2 案例分析
2.1 河南三门峡地区某滑坡概况
本文以河南三门峡地区油气管道边坡监测项目某一滑坡为研究对象,监测环境如图4所示。该滑坡位于河南省三门峡市陕州区菜园乡,毗邻310国道青龙涧河特大桥,坡体南侧和西侧存在较大临空面,在强降雨等条件下,极易发生滑坡等地质灾害,严重威胁管道运输安全。监测区基准站SMX1布设于山顶,视野开阔,周围植被稀疏,观测环境良好;监测站SMX2布设于山体坡面,东侧背山,南侧靠近310国道青龙涧河特大桥,卫星信号遮挡严重,实时动态监测距离为85.35 m,为短基线。监测区域GNSS接收机为和芯星通UB4B0M型,观测天线为海积HG-GOYH7151测量型。

图4 河南三门峡地区某滑坡监测环境Fig.4 Monitoring Environment of One Landslide in Sanmenxia Area of Henan
图5分别展示了基准站、监测站卫星天空环视图及L1信噪比空间分布,颜色由绿色至紫色渐变,逐渐反映观测值质量变差。从图5可以发现,相比基准站,监测站受山体、植被、人工设施等影响信号遮挡严重,且较差观测值在空间域上分布不均,并非全部分布于低高度角区域。

图5 卫星天空环视图及信噪比分布Fig.5 Satellite Polar Coordinates and SNR Distributions
2.2 复杂环境误差特性
为进一步确定复杂环境下监测站卫星信号受干扰情况,本文随机选取监测区2021年年积日第94天的观测数据进行多路径及周跳分析,数据采样间隔为1 s。采用Anubis软件计算基准站和监测站相同时段共视卫星MP1值。图6给出了部分卫星的MP1序列对比,蓝色代表基准站,红色代表监测站。从图6可以看出,相比基准站,监测站受观测环境影响严重,在部分时段MP1值较大,最大达到6 m。

图6 基准站及监测站部分共视卫星MP1序列Fig.6 MP1 Sequences of Partial Common-view Satellites of Base and Monitoring Stations
严重的多路径效应还会导致卫星信号失锁,导致载波相位观测值发生周跳。采用TEQC软件对基准站及监测站GPS双频观测数据进行数据质量检查,并对周跳探测结果进行统计,参数设置均采用软件默认设置(IOD值大于400.0 cm·min,MP12值大于50.00 cm,MP21值大于50.00 cm,IOD表示电离层延迟变化率,MP表示伪距多路径均方根误差)。以高度角5°为区间间隔,周跳发生个数统计如图7 所示。从图7可以看出:基准站周跳主要发生在高度角15°以下;监测站受山体、植被、高架桥等因素影响,周跳分布范围较广,在15°以上高高度角区域均有发生,其中[30°,35°]区间范围周跳发生个数最大,达424次。
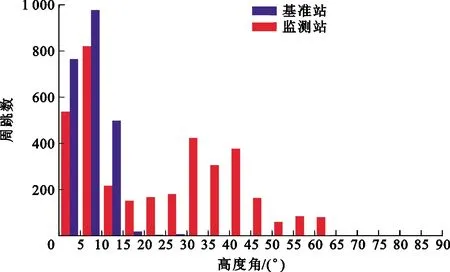
图7 基准站及监测站周跳分布Fig.7 Distribution of Cycle-slips of Base and Monitoring Stations
相比基准站,监测站卫星信号多路径效应严重且高高度角卫星观测值存在频繁的周跳现象,尤其在障碍物边缘区域最为严重。若不对这部分较差观测值进行识别剔除,将会对定位结果产生严重影响。
图8展示了G06卫星L1信噪比站间差值(Δ)序列。从图8可以发现:信噪比站间差值序列大部分保持稳定,但受周围地物(高架桥、山体等)遮挡,序列在第5 720~8 060、19 900~20 650历元出现较大波动,最大值达23 dB。

图8 G06卫星L1信噪比站间差值序列Fig.8 SNR Inter-station Difference Sequence of L1 Band of Satellite G06
分别选取GPS和BDS各卫星信噪比站间差值序列的平稳序列进行区间范围统计,统计结果如图9所示。从图9可以发现,卫星信噪比站间差值均值在-1附近,区间范围为[4,-5],其中BDS卫星区间范围要略大于GPS卫星,这可能是不同系统卫星的性能差异导致的。因此,本文值取-5,值取4。

图9 信噪比站间差值序列可靠区间范围Fig.9 Range of the Reliability Interval of SNR Inter-station Difference Sequence
2.3 定位结果分析
为验证基于基准站信噪比先验信息的GNSS观测数据多路径误差识别方法的可行性,对三门峡地区某滑坡监测站SMX2的2021年年积日第94天实测数据进行识别验证,观测数据采样间隔为5 s,并分别设计了3种识别方案:方案1,传统固定截止高度角(TFC)模型;方案2,基于地形空间环境的ADEM模型;方案3,基准站信息辅助的观测数据剔除方法。为了兼顾较高的数据利用率及较多的较差数据剔除效果,3种方案高度角阈值均设为10°。
图10分别给出了3种方案的识别范围(红色)。图10(a)为采用方案1的识别结果,只能识别高度角小于10°的粗差,剔除率为8.6%;图10(b)为采用方案2的识别结果,仅能对地形线附近一定范围粗差进行有效识别,剔除率为17.8%;图10(c)为采用方案3的识别结果,能够同时对地形线及桥梁附近的较差观测值进行有效识别,剔除率为16.9%。其中,在东北方向的30°~120°,方案1的数据剔除率为0.0%,方案2为3.9%,方案3为1.9%。结合图8进一步分析,可得出方案2和方案3策略要明显优于方案1;此外,对比方案2和方案3,方案2会误剔除信噪比大于45 dB的较好观测值,因此,其剔除率虽然略高,但准确性却低。
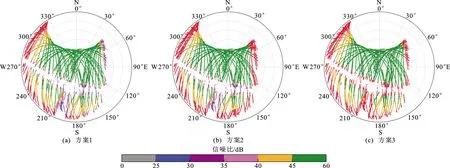
图10 3种方案识别范围对比Fig.10 Comparisons of Recognition Range of Three Schemes
为进一步对比验证3种方案对定位结果的影响,分别进行GPS/BDS双系统动态载波相位差分技术数据处理,均采用传统高度角定权模型,历元间参数不进行继承。浮点解残差序列及有效卫星数如图11所示,均方根误差统计如表1所示。由图11、表1可以看出,方案3浮点解精度明显优于方案1和方案2,在E、N、U方向相比方案1分别提升19.3%、25.2%、20.7%,相比方案2分别提升 36.8%、30.5%、38.2%。这主要是由于方案3精准地识别了受环境干扰的较差观测值,显著降低了监测站周围障碍物边缘多路径衍射误差的影响。值得注意的是,方案2浮点解精度略差于方案1,这主要是因为ADEM模型相比TFC模型数据剔除率有提升,有效观测卫星平均减少了2颗,但由于不能识别剔除受高架桥影响的较差观测值,从而间接扩大了这部分数据对定位精度的影响程度。

表1 3种方案浮点解残差均方根误差Table 1 Residual RMS of Floating Solutions of Three Schemes

图11 3种方案浮点解残差序列与有效卫星序列Fig.11 Floating Solution Residual Sequence and Effective Satellite Sequence of Three Schemes
模糊度的正确固定是载波相位高精度定位的关键技术之一,而固定率是制约复杂环境下高精度定位应用的重要因素。本文采用Lambda算法进行单历元模糊度固定,模糊度最优解和次优解比值(ratio门限)为3.0。表2给出了3种方案GPS/BDS组合定位的结果均方根误差及模糊度固定率。从表2可以看出,方案3相比方案1和方案2,模糊度固定率及定位精度均有明显提升。方案3模糊度固定率达97.2%,相比方案1提高44.2%,相比方案2提高30.8%;固定解均方根误差在E、N方向优于4 mm,N方向优于9 mm,满足滑坡监测需求。

表2 动态载波相位差分技术浮点解与固定解固定成功率与精度统计结果Table 2 Statistical Results of Fixed Success Rate and Accuracy of Dynamic RTK Floating Solution and Fixed Solution
进一步对监测站SMX2的2021年年积日第91~100天连续10 d的观测数据解算结果模糊度固定率进行统计,结果如图12所示。从图12可以看出:方案1连续10 d固定解比例较低,最低只有53.0%,平均固定率为57.4%;方案2连续10 d平均固定率为68.4%,最低为64.6%,相比方案1,模糊度固定率虽然有提升,但是并不显著;方案3模糊度固定率提高显著,连续10 d平均固定率为97.0%,最高为99.2%,相比方案1平均提高39.6%,相比方案2平均提高28.6%。

图12 3种方案模糊度固定率直方图Fig.12 Histogram of Ambiguity Fixation Rate of Three Schemes
3 结 语
针对复杂遮挡环境中卫星信号易受环境干扰,观测数据中存在大量较差观测值,导致模糊度固定困难的问题,本文提出一种基于基准站信噪比先验信息的GNSS观测数据多路径误差识别方法。
(1)该方法基于短距离内基准站和监测站的观测数据相关性,通过对卫星观测数据的信噪比进行站间差分来识别受多路径效应影响严重的较差数据,并对其进行剔除处理,以抵御复杂监测环境的多路径影响。该方法能够有效识别受山体、植被、人工设施等影响的较差观测数据,环境自适应能力更强。
(2)以河南三门峡地区某滑坡监测环境为例,通过实测数据对比分析TFC模型、ADEM模型以及本文提出的方法解算结果。结果表明:本文提出的方法平均模糊度固定率可提升至97%,相比TFC模型平均提高39.6%,相比ADEM模型平均提高28.6%;固定解定位中误差在E、N方向优于4 mm,U方向优于9 mm,满足滑坡监测需求。
西安地质调查中心是自然资源部中国地质调查局直属的正局级公益一类事业单位,是全国六大区中心之一!长期以来,西安地质调查中心与长安大学地质工程与测绘学院在区域地质调查、矿产资源开发、地质灾害调查与环境治理等领域有着持续深入合作,并取得了丰硕的研究成果和荣誉。正值西安地质调查中心组建六十周年之际,谨以此文表达最衷心的祝贺!祝愿西安地质调查中心在各项事业中再创伟业,再铸辉煌,周正健步向前走,年年谱写新篇章!
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
成都信息工程大学学报(2019年1期)2019-05-20 09:14:50
中国交通信息化(2019年2期)2019-03-25 03:20:16
四川环境(2019年6期)2019-03-04 09:48:54
中国环境监察(2016年8期)2016-10-23 05:41:42
公民与法治(2016年19期)2016-05-17 04:18:15
中国交通信息化(2015年10期)2015-06-06 06:39:32
读者·校园版(2015年7期)2015-05-14 13:11:40
河南科技(2014年15期)2014-02-27 14:12:35
华东理工大学学报(自然科学版)(2014年1期)2014-02-27 13:48:36