电动汽车用永磁同步电动机矢量控制系统设计*
2022-06-23 10:58赵晓娟
机电工程技术 2022年5期
赵晓娟
(山西水利职业技术学院,山西运城 044000)
0 引言
随着传统能源短缺危机和生态环境可持续发展需求的到来,新能源汽车将逐渐取代传统燃油车,而电动汽车又是新能源汽车中不可忽视的存在。实际上,全球首辆电动汽车早于19世纪70年代被研制出来,比传统燃油车还要早十几年,但是鉴于当时电动汽车电池充电时间过长、续航里程短、造价高等问题并没有得到解决,传统燃油汽车由于石油被大量开采、内燃机及其控制技术的发展而成为汽车行业的主角。但是,随着传统汽车所排放的CO 等有害物质对环境的影响及噪声污染大、燃油短缺等问题的出现,电动汽车重新站上历史舞台。近年来,欧美、日本等发达国家政府都大力支持电动汽车上的发展,所投入的人力、财力均较多,并获得了明显的进步;我国也于2001 年启动了“863”计划电动汽车专项,随后以众泰2008EV、超越一号、F3DM、F6DM等为代表的电动汽车陆续被研制出来,代表着我国电动汽车也进入了大跨越发展的新阶段[1-5]。
电动汽车的驱动系统担负着能量转换、传递的重任,而驱动系统的主要构成为电动机。永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)由于其结构简单、效率高、噪声小、控制性能好等优势,得到了广泛使用。这类电机的控制主要采用恒压频比(U∕F)控制、矢量控制(VC)和直接转矩控制(DTC),其中U∕F控制存在起动和低速时转矩动态响应差、稳定性不好等问题;DTC 控制主要是采用定子磁链定向,利用离散的两点式控制直接对电动机的定子磁链和转矩进行调节,结构简单、转矩响应快,但将其用于永磁同步电动机的控制在技术上还存在缺陷。矢量控制又称为磁链定向控制,是通过两次坐标变换,把定子三相电流分解为id和iq分别进行调节,模拟直流电机转矩的控制方法,属于连续控制,转矩脉动大大减小[6-9]。本文主要研究电动汽车用永磁同步电动机的矢量控制系统设计,并在Matlab∕Simulink中进行仿真模拟。
1 PMSM数学建模
为分析方便,在进行永磁同步电动机的数学建模时,作出如下假设:PMSM 定子绕组采用星形连接,且其上流过的电流为对称三相正弦量;忽略定子磁通的谐波及饱和影响;忽略磁滞损耗和涡流损耗。在此基础上,研究PMSM 矢量控制算法时,建立如图1 所示的坐标关系,其中a-b-c为三相静止坐标系,α-β为两相静止坐标系,d-q为两相旋转坐标系[8]。
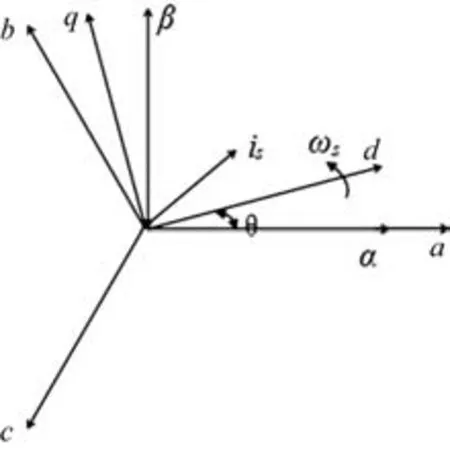
图1 PMSM坐标关系图
经过两次坐标变换,得到d-q坐标系下的数学模型如下。
电压方程:
磁链方程:

转矩方程:

运动方程:

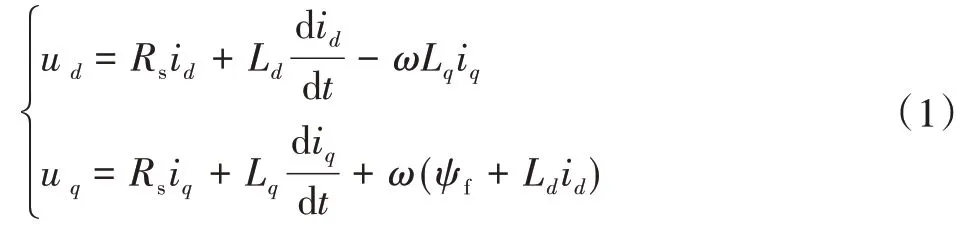
式中:ud、uq、id、iq、yd、yq、Ld、Lq分别为永磁同步电动机定子侧d轴和轴q上的电压、电流、磁链和电感;ω为转子旋转的角速度;yf为转子永磁体磁链;P为电动机极对数;Te为电磁转矩;TL为负载转矩;J为转动惯量。
通过上面的分析,将永磁同步电动机的数学模型大大简化。由于本文主要是研究表贴式永磁同步电动机,属于隐极式电机,故Ld=Lq=Ls,则转矩方程进一步简化为式(5),即,该永磁电机的Te仅决定于其交轴电流分量,当直轴分量id=0时,iq最大,功率大大提高,使电动机的定子铜耗降低,效率显著提升。
转矩方程:

2 SVPWM控制技术
矢量控制(VC)是一种模拟直流电机的控制方法,将定子电流分解为励磁电流和转矩电流两部分,直接进行控制。永磁同步电动机是一个非线性、多变量、强耦合的动态系统,VC 的提出很好地解决了PMSM 控制系统复杂、效果差的问题,并且在永磁同步电动机的矢量控制中采用SVPWM 控制技术,也就是通过直接控制功率器件的开关状态,使得到的电机旋转磁场接近于圆形,这样不仅能使逆变器输出电流的谐波成份及损耗大大降低,从而减小电磁转矩的脉动,且算法简单,效率高。图2所示为一三相桥式电路,开关器件导通为1,截止为0,该电路共输出如图3 所示的8 种基本电压空间矢量,其中U0(000)、U7(111)为零电压矢量,其余的6个电压矢量U1(100)、U2(110)、U3(010)、U4(011)、U5(001)、U6(101)为有效矢量,且各个空间矢量的幅值都为通过这8 个基本电压空间矢量的组合可以合成任意需要的电压矢量,图3以第3扇区Usref为例[10]。
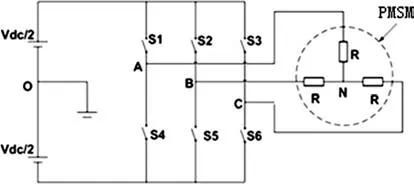
图2 三相桥式电路
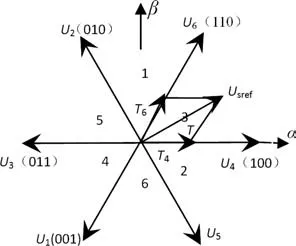
图3 逆变器电压空间矢量

推导可得:
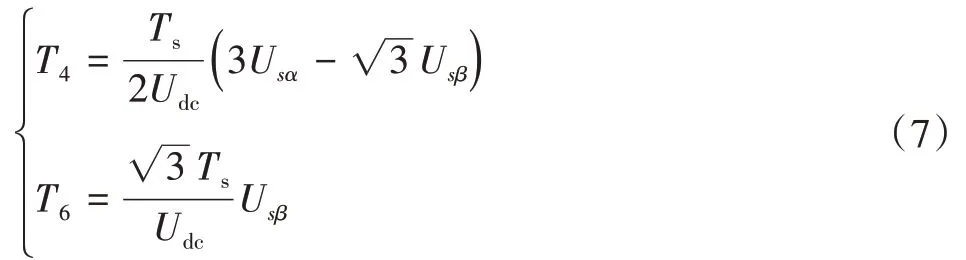
式中:Ts为开关周期;T4为开关矢量U4的作用时间;T6为开关矢量U6的作用时间;T0为零矢量的作用时间,零矢量的选择按照开关动作次数最少的原则。
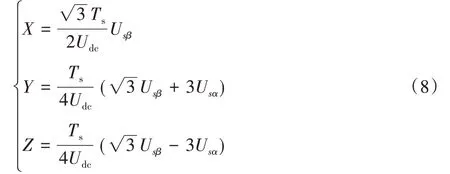
通过上面分析,电压空间矢量在其他扇区时,均可得到相邻两个基本电压矢量的作用时间,为方便计算,定义:
对于不同的扇区,相邻两个基本电压矢量按表1取值。
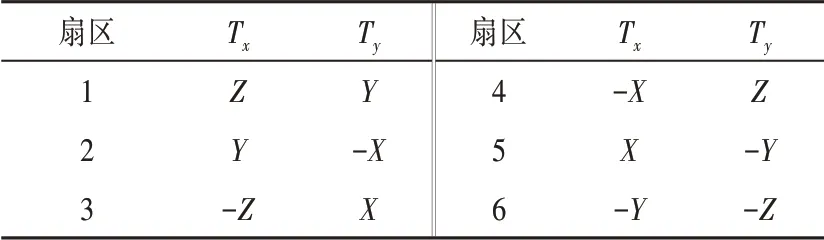
表1 Tx、Ty赋值表
3 PMSM矢量控制策略
永磁同步电动机的矢量控制是一种基于磁场定向的控制方法,包括转子磁链定向控制、定子磁链定向控制、气隙磁链定向控制和阻尼磁链定向控制4种,本文PMSM采用转子磁链定向的控制方法[11-12]。根据数学建模中电磁转矩的表达式可知,此控制策略是以转子磁极轴线定向去控制定子的交轴电流id,可最大程度上防止永磁体去磁而导致的电机性能变化。
图4 所示为电动汽车用永磁同步电机矢量控制的原理框图,该控制系统在原来研究的基础上增加了位置伺服控制,使系统能够得到快速、精确的相位控制,提高了系统的动态响应能力,稳定性更好。具体工作过程如下:三相逆变器输出电流ia、ib、ic经过Clark变换成为ia、ib,再经过Park 变换成为id、iq。速度给定值与位置传感器反馈回来的电机实际速度的差值经速度PI 调节器后输出为iq
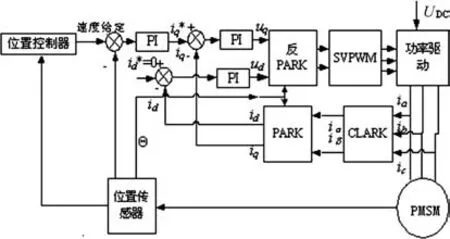
图4 电动汽车用PMSM矢量控制原理
*,再与实际检测到的转矩电流iq的差值经电流PI调节器后输出为uq;励磁电流的期望值id*=0 与实际检测值的差值经PI 调节器后输出为ud。ud、uq经反Park 变换得到ua、ub,送入SVPWM 控制器,得到6 个功率器件的控制信号,最终为永磁同步电动机提供合适的三相电压。该控制系统为包括了位置控制、速度控制和电流控制的三闭环控制系统,且SVPWM 控制技术的引入,使得逆变电路的开关损耗大大减小,电压利用率显著提升,谐波及脉动成份降低,电动机的调速性能得到明显改善。
4 控制系统仿真建模及分析
根据图4 所示的控制系统原理框图,在MATLAB∕Simulink环境下搭建仿真模型,如图5所示。具体电机参数为:定子电阻Rs= 1.9 Ω,交直轴电感Ld=Lq=2.7 mH,主磁链ψf=0.27 Wb,极距τ=45 mm,动子质量M=5 kg,阻尼系数Bv=0 N · m∕s,极对数P=4。
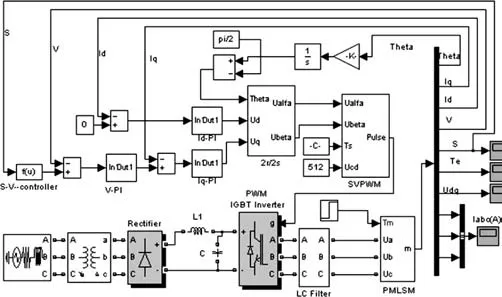
图5 电动汽车用PMSM矢量控制的仿真模型
从仿真结果分析出,该PMSM 由空载启动,转速很快从0 加速到给定转速1 100 r∕min,仅需要0.007 s 的时间,动态响应快,定子侧三相电流ia、ib、ic也很快接近正弦波;当0.01 s 负载突然增加、0.022 s 负载突然减小时,定子三相电流,dq轴电流及电磁转矩也很快相应,且id接近于0,说明这种基于位置、速度、电流的三闭环矢量控制算法能得到满意的控制效果。
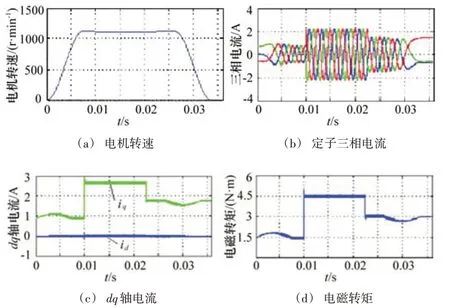
图6 电动汽车用PMSM矢量控制的仿真结果
5 结束语
本文针对电动汽车用PMSM 的矢量控制进行了分析研究,搭建了电机的数学模型,对SVPWM 控制技术进行了分析,在原来基于速度、电路的双闭环PMSM 矢量控制系统中,又增加了位置伺服控制,构成了一种三闭环的矢量控制系统,并在Matlab∕Simlink 环境下进行建模仿真,从实验波形图分析可知,位置环的增加使控制系统能够得到快速、精确的相位信号,系统能够快速作出反应。整体来说,该控制系统动态响应快,具有很好的稳定性、跟随性、抗干扰性等,启动、制动性能良好,且电流畸变率低,整体控制效果理想。
猜你喜欢
微电机(2022年8期)2022-10-12
防爆电机(2022年3期)2022-06-17
中国特种设备安全(2022年1期)2022-04-26
传感器与微系统(2022年3期)2022-03-23
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
微电机(2020年7期)2020-08-01