具有动态感知防撞功能的婴儿学步车的设计与实现*
2022-06-23 10:58:12冯伯翰陈旭东郭达鋆欧益权
机电工程技术 2022年5期
冯伯翰,陈旭东,郭达鋆,欧益权
(广东松山职业技术学院,广东韶关 512126)
0 引言
随着新生儿数量逐年增加,人们一直在思考如何更轻松地照看婴儿。伴随着智能家居的推广普及,传感器技术、控制技术的不断发展,婴儿学步车也应该实现智能化。但目前市面上的婴儿学步车智能化水平尚存在不足,且小部分存在设计缺陷,学步车容易发生与周围物体发生碰撞、滑落到坑洞、台阶、斜坡等情况,造成学步车翻滚,使婴儿受伤[1],相关统计指出以头部和颈部受伤最为常见。
近年来,科研学者也对婴儿车的智能化作出了贡献,对婴儿车摇篮结构进行了重新设计,避免婴儿随着摇篮进行左右摇晃,降低婴儿侧翻风险[2]。通过模块化设计实现自动摇车、音乐播放、体温检测、避障、遥控等功能,提高了婴儿车的智能化程度。在婴儿学步车上搭建了嵌入式系统,通过将压缩感知理论应用到TLD 跟踪算法,实现婴儿学步车能够自主跟踪前方家长前进;但仍需要家长时刻保持在婴儿车的前方,为婴儿学步车提供路线引导[4]。为了降低家长照看婴儿的负担,保障婴儿在学步过程中的安全,本文设计一款具有动态感知功能的闭环防碰撞控制系统的婴儿学步车,配备避障模块、报警模块、电源模块、控制器模块、制动模块和摄像头模块,建立障碍物链表,判断障碍物运动情况,在危险情况下自动进行制动并报警,实现动态感知防撞功能,保护婴儿学步安全,减轻家长照看婴儿的负担。
本文结合婴儿学步车使用环境,提出婴儿学步车防撞实验的工况,并进行重复实验,实验结果表明该婴儿学步车能够有效防止学步车发生碰撞、翻滚等情况的发生,保障婴儿的人身安全,具有一定的推广价值。
1 婴儿学步车的抗倾覆特性
婴儿在使用学步车时,易发生以车轮为支点,婴儿施加在学步车上的推力为杠杆力,学步车侧滚、前滚的情况。为了有效防止此类现象的发生,本文根据船舶浮心理论[5],引入婴儿学步车的抗倾覆稳定性这一概念。婴儿学步车车体偏离平衡位置后,能够自主恢复到平衡位置的特性称为婴儿学步车具有抗倾覆特性。若婴儿学步车车体偏离平衡位置后无法自主恢复,甚至车体继续倾斜,车体将会丧失抗倾覆稳定性,这是婴儿学步车使用过程中不允许的。
根据浮心理论,若婴儿学步车的车体浮心高度高于车体的重心高度,婴儿学步车车体具有抗倾覆稳定性;反之,婴儿学步车丧失抗倾覆稳定性;当婴儿学步车的浮心高度与重心高度相等时,婴儿学步车处于随遇平衡的状态,称之为稳定和失稳的临界状态。
为了确保婴儿学步车具有足够的抗倾覆特性,在设计时可以采用在婴儿学步车车体下部配重,上部采用轻质高强度材料等方法,应尽可能留有足够大的设计余量,提高婴儿学步车的抗倾覆稳定性,保证婴儿学步过程中的安全。
2 防撞婴儿学步车系统总体设计
本文设计的防撞婴儿学步车系统总体设计框图如图1所示。系统主要包括电源模块、控制器模块、制动模块、报警模块、避障模块、摄像头模块。其中控制器模块是系统的核心部件,接受各个模块发出的信号,经过数据处理分析后对相应模块进行实时控制,保护婴儿的安全[6]。
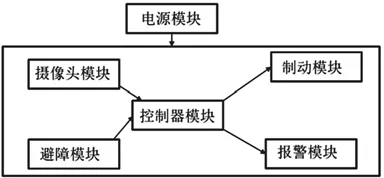
图1 系统总体设计框图
3 系统硬件选型
(1)控制器模块
本文控制器模块芯片选择的是STC89C52 处理器,它是基于MCS-51内核的8位微控制器,程序存储容量为8 kB,工作电压为3.8~5.5 V,拥有定时计数器、I∕O 口、看门狗等内部资源。该芯片具有运行速度快、低功耗、成本低廉、外部资源丰富等特点。
(2)超声波避障模块
阿多尼弗林碱对照品 (批号:111877-201201;浓度:0.092 μg·mL-1), 野百合碱对照品 (批号:111878-201102;纯度:99.8%),均购自中国食品药品检定研究院;感冒消炎片(昆明中药厂有限公司,规 格 :0.3 g/片 , 批 号 :480003、480095、480097、480098、480099);乙腈为色谱纯,其余试剂为分析纯;去离子水自制。
本文系统的超声波避障采用HC-SR04模块,该模块包含控制电路、超声波接收器和发生器[7]。工作电压为直流5 V,探测距离范围为2~450 cm,最高探测精度可达0.2 cm。通过测量发出信号至信号返回的时间差,计算得到与障碍物之间的距离。
(3)高清摄像头模块
本文系统的摄像头模块选用TSL1401CL 线性CCD 模块,工作电压为3~5 V 直流,其广角摄像头能够采集前方120°范围内的物体,并将图像数据实时传输至主控制器,具有抗干扰性、高精度、高可靠性等优点。
(4)制动模块
本文系统制动模块采用微小马蹄锁,布置在婴儿学步车的每个车轮上方。一旦遇到危急情况,控制器发出信号,为轮边电机提供高电平,控制马蹄锁迅速动作,实现制动,保护婴儿;当婴儿车前方不再有障碍物、台阶等危险路况时,控制器控制制动模块自动开锁。该制动模块具有动作速度快、可靠性高等优点,动作速度小于1 s。
(5)报警模块
本文系统的报警模块主要由有源蜂鸣器及其关联电路构成,蜂鸣器额定电压为3 V,声压为80 dB。当婴儿学步车遇到危险情况,控制器给报警模块提供高电平,使得蜂鸣器发出警报声;当大人手动调整婴儿学步车方向后,控制器将报警模块的电压输出更改为低电平,警报声消失。
(6)电源模块
电源模块由NMC 三元锂离子电池和KM2596 电压转换模块组成。电池采用可充电锂电池,输出电压为3.7 V,具有安全环保、高容量等优点。电压转换模块将电池电压根据其他模块的额定电压进行调压处理,保证所有模块正常运行。
4 系统软件设计
在完成硬件选型和系统搭建后,需要进行程序的编写与烧录。本文婴儿学步车系统的整体语言编写是C 语言,编译软件是Keil4。婴儿学步车在完成代码烧录后,启动电源进行模块初始化,包括摄像头模块、时钟设置、延时函数、报警模块等。在模块初始化顺利结束后系统开始采集周围环境信息,婴儿车进入探测状态,当检测到有台阶、突出障碍物时,启动报警模块和制动模块,一直持续到婴儿车在外力作用下改变方向,前方不再有危险障碍物[8-9]。系统流程如图2所示。
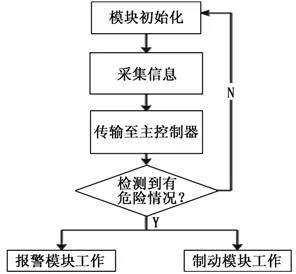
图2 系统流程
在整个系统工作流程中,最为重要的是动静态障碍物的检测,即采用何种算法保障处于运动状态下的婴儿学步车能够识别动态环境下的障碍物,建立障碍物链表。由超声波模块和摄像头模块的特点可以看出,二者的识别范围为特定角度内的发散区域,障碍物被识别后以识别点的形式发送到处理器,并且距离越远的障碍物,在空间内占据的识别点个数越少[10-12]。将空间中连续的识别点进行连通处理,就能探测到障碍物的空间大小及其位置。
由于超声波和摄像头每个周期都只能采集到当前周期的环境信息,因此为了检测动态环境内的障碍物,必须对多个周期内的采样数据进行分析,得到障碍物的位置、体积大小、运动速度和方向等,并建立障碍物链表。基本算法思路如下。
(1)采集实时环境数据,建立并保存环境地图数据库。对采集点的数据进行初步处理,得到障碍物坐标和体积大小,并以此为根据建立当前T周期内的障碍物链表。
(2)采集并读取下一周期内的环境数据,建立T+1周期内的障碍物链表。
(3)对于T+1 周期障碍物链表,依次搜索数据与T周期内的链表数据进行配对,当两个障碍物间的估计坐标距离小于设定阈值X时,可以认为这两个障碍物为同一个障碍物。
(4)对于已经实现配对的障碍物,在环境地图中进行地图匹配,可以得到在两个采样周期内该障碍物在空间xyz坐标系上的位移,并通过计算可以得到障碍物的速度和方向。
(5)将每个障碍物的速度值与设置的速度阈值V进行比较,若速度值大于阈值V,则判断该障碍物为动态障碍物;反之则为静态障碍物。判断后将运动状态记录至该障碍物的障碍物链表中。
(6)返回步骤(2)中,采集下一周期的环境数据。
其中,考虑到系统采样周期较小,为了减少计算量,将采样间隔取为0.2 s。并且在试验中将位移阈值X设置为20 cm,速度阈值V设置为25 cm∕s。但是该算法对于障碍物的形态和运动状态具有一定的限制,障碍物移动速度过快或体积过大时,会出现无法识别到障碍物的现象,降低识别精度。
5 具有动态感知防撞功能实现
为了测试防撞婴儿学步车的性能,本文设计了4 种实验工况,分别对应日常生活中常见的4 种会对婴儿人身安全造成伤害的情境:上下楼梯、以桌椅为代表的静态障碍物和以扫地机器人为代表的动态障碍物。实验时为了模拟婴儿正常使用学步车,采用小型电动机推动学步车前进,速度为10 m∕min。婴儿学步车在控制系统作用下实现制动至完全静止,取婴儿学步车最前端与障碍物间的距离作为安全距离,并设定可接受的最小安全距离为1 m,重复实验10次,实验数据结果如表1所示。结果表明,本文设计的婴儿学步车可以识别日常生活中的多种障碍物,均满足安全距离小于设定值1 m,其中对于地面突出的静态障碍物识别效果最优,而对于动态障碍物的识别效果不够理想,原因对于移动障碍物,系统会自动调节采集系统的识别分辨率,这在一定程度上削弱了识别速度。
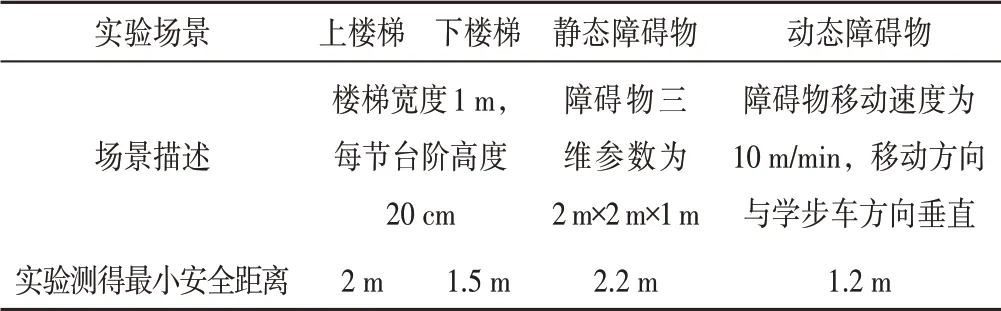
表1 实验结果
6 结束语
本文设计的具有动态感知防撞功能的婴儿学步车以STC89C52单片机作为控制器,搭建具有动态感知的闭环防碰撞控制系统,接受来自摄像头模块和超声波模块对周围环境感知的数据,建立障碍物链表,判断障碍物运动情况,并计算动态障碍物的移动速度,并对报警模块和制动模块进行控制,经过多次调试和测试试验后,顺利实现动态防撞、保护婴儿等功能。本文设计的婴儿学步车经过适当改进可以投入市场应用,能够有效保护婴儿学步安全,应用面广、实用性强,具有一定的应用前景。
猜你喜欢
成都信息工程大学学报(2019年2期)2019-08-28 10:00:46
第二课堂(课外活动版)(2019年12期)2019-02-10 03:59:37
瞭望东方周刊(2018年46期)2018-12-05 05:14:14
学生天地·小学低年级版(2018年5期)2018-09-13 10:10:32
成都信息工程大学学报(2018年1期)2018-05-31 08:40:25
中学科技(2015年7期)2015-07-03 05:57:13
好孩子画报(2015年7期)2015-05-30 10:48:04
科学生活(2014年12期)2014-12-20 09:46:13
电测与仪表(2014年1期)2014-04-04 12:00:22
家庭医学(2013年6期)2013-04-29 00:44:03