基于PID控制器的遥操作水下机器人航向运动研究*
2022-06-23 10:58周焕银刘国权
机电工程技术 2022年5期
万 程,周焕银,刘国权
(东华理工大学机械与电子工程学院,南昌 330013)
0 引言
由于陆地资源的不断开采导致陆地资源日趋枯竭,人们开始对海洋、湖泊等水域资源展开探索研究[1-4]。在20世纪90年代中期开始,水下机器人就已经大量运用在水下探测及军队勘察等任务中[5-8]。随着水下机器人技术的不断发展,水下机器人水下探测的范围不断扩大以及作业难度的不断增加,导致其任务要求也越来越多样化,以及用户对水下机器人工作过程中控制品质的要求也更高[9-10]。
良好的运动控制技术是遥操作水下机器人能够高效地完成水下作业的关键,其中遥操作水下机器人精准定深、航向等运动控制以及较强的抗干扰能力是保证其能够高效地完成水下作业的前提条件[11-13]。遥操作水下机器人的控制品质主要受到以下3 个因素影响:(1)有缆无人水下机器人自身系统是一种强耦合的非线性运动控制;(2)水下环境不易预测,导致水流环境干扰复杂多样;(3)任务过程中,水下机器人自身结构、恢复力、机械手等因素的变化。随着ROV 运动控制相关技术的日趋成熟,其运动控制理论也逐步完善,人们对水下机器人的控制精度也在逐步提高,因此,设计一套可以克服诸多影响因素的控制策略来提高无人水下机器人在复杂水流环境下的运动状态与控制效果是非常必要的。
本文将采用PID 控制方法设计遥操作水下机器人的航向运动控制器并完成仿真实验,分析仿真实验结果。验证仿真实验的准确性,将设计的航向控制器嵌入到水下机器人本体,进行航向运动水池试验,对比分析水池试验和仿真实验的结果。
1 ROV水下机器人国内外研究现状
2011 年瑞典公司Ocean Modules 开发的于V8 Sii,是一种小型的检测级ROV,拥有8 个推进器和直观控制系统使其运动完全自由,能够实现360°的任意旋转,通过搭载的卫星定位系统,可以完成水下机器人的自动跟踪任务[14]。如图1所示。

图1 V8 Sii
广州海洋地质调查局协同上海交通大学、哈尔滨工程大学等国内高校在2014 年完成了我国第一台可达到4 500 m深的有缆遥控水下机器人——“海马号”完全自主研发工作,同年在我国南海海域搭乘“海洋六号”综合科学考查船完成了海上试验,其中包括海底电缆和海底地震仪布置、沉积物采样以及海底热流原位测量等任务,实现了与水下上升下降平台的协同作业,完成了定深、定向等运动且通过了多达91 项技术指标的现场考核,在当时是中国独立研究的最大下潜深度的、最高国产化率的无人遥控水下机器人作业系统[15]。如图2所示。
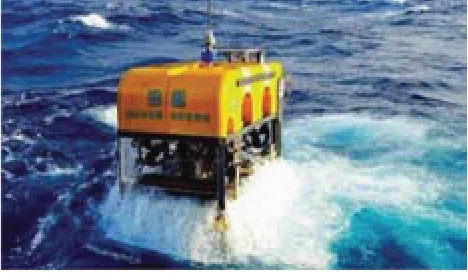
图2 海马号有缆遥控水下机器人
2 遥操作水下机器人及控制模型简化
本文所研究的遥操作水下机器人配有3 台推进器。其中2 台推进器水平安装布水下机器人艉部,用于前、后、侧移及偏转运动,另外1 台垂直安装在水下机器人顶部用于上升和下降运动,保证水下机器人能够保持一定的航速完成六自由度的运动。水下机器人同时搭载2台摄像机、2只照明灯、1 台声纳等观测设备。外形尺寸为92 mm×720 mm×545 mm,自身质量为85 kg,能够下潜的最大深度为300 m,前进航速不小于3 kn(1 kn=1.852 km∕h),侧移航速不小于1.5 kn。遥操作水下机器人如图3所示。

图3 遥操作水下机器人
由于水下机器人的系统具有强耦合性、非线性,本文在研究水下机器人的运动控制时,对其运动模型进行解耦得到航向运动模型。水下机器人系统航向运动控制模型的执行机构多种多样,本文所研究的遥操作水下机器人系统航向执行机构为布置于系统艉部左右两侧的推进器,航向控制的主要状态变量为系统航向角、航向角速度以及偏航角速度等。为简化控制模型,将运动中对水下机器人航向影响较小的状态量近似为零考虑,简化的航运动控制模型为:
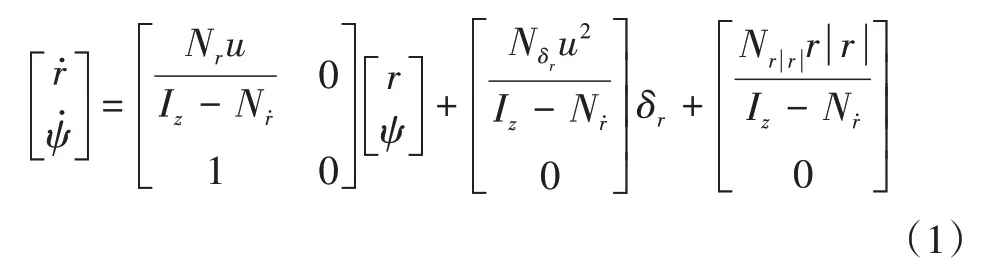
式中:r为偏航角角速度;ψ为偏航角角度;其余参量为相关水动力参数。
3 PID控制器设计及运动控制实验
3.1 PID控制器设计
PID 控制由比例控制器、积分控制器和微分控制器3个部分构成,是最早的且非常经典的一种控制方法,凭借结构简单、控制参数易于调整、可靠性高,且鲁棒性好等优点,因此许多专家和学者选用这种控制方法。其具体的结构如图4所示[16]。
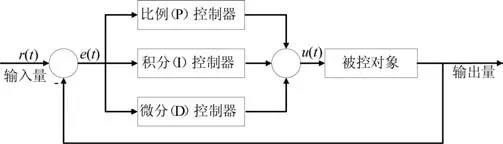
图4 PID结构框图
通过PID 结构框图,可以看出这种控制方法是一种线性控制方法,通过对被控对象输入量与输出量之间的偏差进行比例、积分和微分线性组合控制,从而对被控对象进行控制,可以得到经典的PID控制规律为:

式中:KP为比例控制器的控制系数;TI为积分控制器的时间常数;TD为微分控制器的时间常数。
3.2 遥操作水下机器人航向运动仿真实验
基于航向控制模型,设计基于PID 的航向控制器,进行控制参数调整,若比例控制器参数过大,则会导致系统超调量增大、振荡次数增多且系统调节时间也会变长,甚至会使系统难以收敛;虽然引入积分控制器会消除系统静差,但积分控制器参数过大,同样会使系统超调量增大、振荡次数增加,同时调节时间也更长;引入微分控制器,能够减小系统超调量、振荡次数减少且能够提高系统的动态性能,如果微分控制参数过大,会使系统误差发生较大变化,从而导致被控执行机构发生抖振。基于上述规律不断的调整控制器的3 个参数,最终调整参数K_P=200,K_I=10,K_D=12,得到速度控制仿真结果曲线如图5所示。
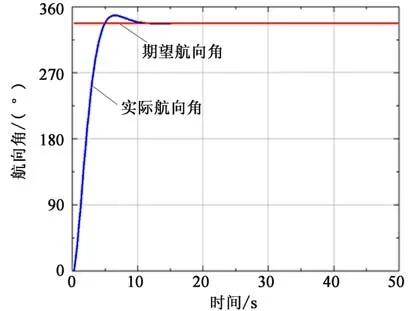
图5 基于PID的航向控制响应曲线
图中浅色曲线为遥操作水下机器人航向角期望值,深色曲线为遥操作水下机器人的实际航向角度,设计的基于PID 的航向控制器基本可以实现对遥操作水下机器人航向的控制任务,完成0°~340°的航向运动。在t=10 s 时系统趋于稳定状态,最大超调量为2.43%。
3.3 遥操作水下机器人航向运动水池试验
为验证仿真实验的准确性,下面进行水池试验,试验水池为室外游泳水池,水池尺寸为50 m×20 m,水池最深处可达到2.1 m引入遥操作水下机器人航向控制算法后,进行水池试验,如图6所示。

图6 水下机器人航向水池试验
3.3.1 参数未整定前水池试验
首先进行PID 参数未整定前遥操作水下机器人航向水池试验,观察水上控制界面确定水下机器人当前航向处于90°,然后在水下机器人控制平台的自治界面依次输入航向200°、航向330°指令,设置水下机器人速度为10 kn,调节时间为100 s,得到参数整定前遥操作水下机器人航向变化曲线如图7 所示。由图可以看出,在加入PID 控制算法后,遥操作水下机器人航向运动虽然能够完成所输入的相关控制指令,但系统一直处于不稳定状态,这说明没有一个合适的PID 控制参数,是不能够使系统达到良好控制效果的。
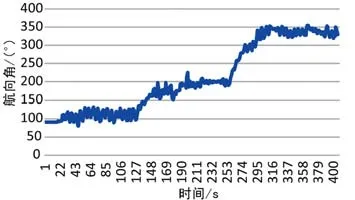
图7 参数整定前水下机器人航向变化曲线
3.3.2 第一次参数整定后水池试验
下面对控制器的3个参数进行整定,整定过程如下:首先将ki_head 和kd_head 两参数置零,将kp_head 参数值由0 开始逐渐增大,直至水下机器人航向曲线出现振荡,此时将kp_head 参数从当前值逐渐减小,减小到航向曲线振荡消失,记录此时kp_head 参数值,设定kp_head 参数值为记录值的50%;然后将ki_head 设置一个较小值,然后慢慢增大,直至被控系统的输出曲线出现振荡,此时将积分值再慢慢减小到系统输出曲线的振荡消失,记录此时ki_head 参数值,设定ki_head 参数值为设定值的45%;最后引入一个较小的kd_head 参数,调节过程与积分环节一样,记录当前kd_head 参数值,取kd_head参数为当前值的56%。最终PID控制器参数分别为kp_head=200、ki_head=20、kd_head=10,此时水下机器人航向角度值为190°,在自治界面依次输入航向285°、航向215°以及航向275°指令,对获取的遥操作水下机器人航向数据进行处理,得到第一次参数整定后的遥操作水下机器人航向变化曲线如图8所示。
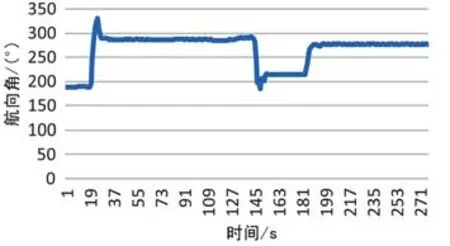
图8 第一次参数整定后水下机器人航向变化曲线
参数整定之后,通过图8 可以看到此时航向变化的曲线明显要完美许多,此时最大超调量依次为15.74%、13.76%、1.35%,响应时间依次为25 s、31 s、20 s,与参数未整定前遥操作水下机器人航向变化曲线对比,PID 航向运动控制器的控制参数整定后系统的响应时间、超调量、静态误差等指标都有了明显的改善,这说明了PID 控制器对于控制系统确实有着极大的改善作用,同时设置PID控制器的3个参数也至关重要。
3.3.3 第二次参数整定后水池试验
通过上述遥操作水下机器人航向变化曲线还可以看出,系统在调节过程中,仍具有较大的超调量,因此可以依据相同方法对PID 控制器的3 个控制参数进一步微调,最终调整参数kp_head=200、ki_head=15、kd_head=15,再次对遥操作水下机器人依次输入航向指令偏航190°、偏航265°、偏航340°。
本次试验起始时遥操作水下机器人航向角度值为45°,在自治界面依次输入上述指令后,对获取后的遥操作水下机器人航向数据进行,得到第二次参数整定后的遥操作水下机器人航向变化曲线如图9所示。
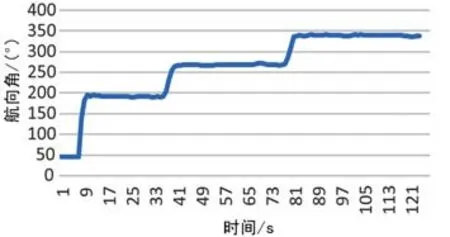
图9 第二次参数整定后水下机器人航向变化曲线
对比第二次参数整定后遥操作水下机器人航向变化曲线和第一次参数整定后遥操作水下机器人航向变化曲线可以看出,最大超调量依次为2.39%、1.08%、1.63%,响应时间依次为21 s、16 s、11 s,经过微调,控制系统的超调量明显降低,控制效果也更加良好。因此PID 控制器中调节积分参数和微分参数对于系统超调量减小、系统稳定性的提高、系统响应速度的加快等都有帮助。最后得出PID 控制参数整定原则为:若系统中有较大误差时,增加比例控制环节;若系统中有较小误差时,增加积分控制环节;若系统调节时间长时,增加微分控制环节。
对比分析水池试验的数据与仿真实验的输出曲线,可以看出在最大超调量这一性能指标,水池试验与仿真实验控制效果相近,而在响应时间这一性能指标,水池试验所需时间要远超于仿真实验的响应时间。由于构建的遥操作水下机器人控制模型与实际的遥操作水下机器人运动中还存在一定的误差并且在实际水池试验中,还存在水下环境及其他因素等造成的干扰,因此在实际的水池试验中还需不断的对PID控制参数进行调整以达到最优控制效果。
4 结束语
本文采用PID 控制方法进行遥操作水下机器人的深度控制、航向控制以及速度控制仿真实验,分析实验结果发现所设计的控制器基本能够完成遥操作水下机器人的运动控制任务,为验证仿真实验的准确性,基于设计PID 航向运动控制算法结合临界比例度参数整定方法,完成控制参数未整定前、第一次控制参数整定后以及第二次控制参数整定后的遥操作水下机器人航向水池试验,分析3 次水池试验结果显示控制参数整定后的遥操作水下机器人系统的响应时间、最大超调量等性能指标均有改善;对比并分析水池试验与仿真实验的结果,得出设计的PID 控制器能够使遥操作水下机器人完成相应的航向控制任务,但相比于仿真实验下的理想环境,水池试验时还有许多不确定的因素干扰影响,在实际的工程应用中还需不断的对控制参数进行调整。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
数学小灵通(1-2年级)(2020年10期)2020-11-14
民用飞机设计与研究(2019年4期)2019-05-21
新少年(2018年3期)2018-07-07
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
电子制作(2017年24期)2017-02-02
小学生导刊(低年级)(2016年11期)2016-11-14