高精度永磁同步电动机矢量控制系统的设计
2022-06-23 08:52马鹏欢霍耀佳
宁夏电力 2022年2期
马鹏欢,霍耀佳
(国网宁夏电力有限公司电力科学研究院,宁夏银川 750011)
0 引言
传统直流电机的原理是利用定、转子励磁绕组产生励磁磁场使电机转动,此过程的机械换向需借助于换向器和电刷的工作来完成,电动机一旦出现故障就会造成维护成本过高,而且控制精度较低更是限制了其在高精度控制领域的发展。随着新型材料以及电机领域的不断发展与进步,利用永磁体这种材料代替励磁绕组进行励磁,使电动机在结构上直接省去了装配绕组、集电环和电刷的麻烦,从而提高了电动机运转的可靠性[1-2]。从永磁同步电动机(permanent magnet syn⁃chronous motor,PMSM)发展初期到现在,各种各样永磁材料的不断更新和永磁同步电动机的不断发展虽然大幅度提高了其运行性能与效率,但面对激烈的市场竞争,永磁同步电动机目前在高精度伺服控制领域显露出需要继续深入研究的紧迫性和必要性:文献[3]为提高控制精度制定了基于预测函数控制理论的伺服系统速度控制策略;文献[4]提出一种基于他控式变频调速策略以提高控制精度;文献[5]基于状态空间模型,在功率因数校正的基础上引入模糊控制器提高控制精度;文献[6]提出一种新型永磁同步电动机变结构的自抗扰速度控制方法,从而减小系统误差,优化控制精度等。本文通过研究提升表面贴装式永磁同步电动机伺服控制系统的稳态性能与控制精度,以使其被广泛应用在矿用提升机、精密机床等领域。
1 PMSM的数学模型与矢量控制算法
1.1 永磁同步电动机的数学模型
由于表面贴装式永磁同步电动机存在涡流和磁滞损耗等复杂因素影响,因此提出以下假设条件来研究PMSM的数学模型,即:
(1)定子绕组电流是三相对称正弦波;
(2)忽略涡流和磁滞损耗的影响;
(3)忽略定子磁场谐波与饱和的影响。
通过以上假设可以得到三相静止坐标系下的PMSM基本方程,再利用Clarke变换和Park变换推导出永磁同步电机在d-q旋转坐标系下的基本方程。
定子磁链方程为

式中:ψd、ψq—定子磁链的d、q轴分量;
Ld、Lq—直轴电感和交轴电感;
id、iq—定子电流的d、q轴分量;
ψf—转子磁链。
由式(1)可以看出,定子磁链直轴分量ψd由电枢反应磁场Ldid和转子永磁磁场ψf两部分组成,定子磁链交轴分量ψq只由电枢反应磁场Lqiq体现。
定子电压方程为

式中:ud、uq—定子电压的d、q轴分量;
R1—定子电阻;
p—微分算子;
ω—转子角速度。
从式(2)可以看出,其定子电压方程不需要计算转子位置角,可直接通过公式推导间接解耦转子位置角,而且该方程中除了转子角速度外都是常数,便可在设计控制算法时不需要考虑太多的非线性变量,使控制算法得到进一步简化。
电磁转矩方程为

式中:np—电机极对数。
在推导过程中乘3/2是合成变换而不是恒功率变换。
电机的运动平衡方程为

式中:J—转动惯量;
TL—负载转矩;
B—阻尼系数。
从式(3)可以看出,输出的电磁转矩Tm存在id和iq的乘积项,也就是直轴电流id与交轴电流iq之间存在耦合,如果id和iq之间的耦合关系没有解决,就无法实现电磁转矩的线性化控制。
要实现对于PMSM的高精度控制,不仅要解决直轴电流id与交轴电流iq之间的耦合关系,还需引入矢量控制算法。
1.2 矢量控制算法
矢量控制又称磁场定向控制,多用于非线性、强耦合的多变量系统。在转子、气隙和定子磁场定向中选择固定的同步旋转坐标轴时,考虑到选择气隙和定子磁场定向需要考虑更多的耦合关系,所以本文选择转子磁场定向控制。由于直轴电流id在电磁转矩方程中所起的作用并不大,因此若能控制住id=0始终保持不变,通过将id=0代入式(3)就可以得到:

由式(5)可以看出,id和iq的乘积项直接被消除了,此时电磁转矩Tm与直轴电流id的大小无关,由于与iq相乘的系数可以看做是常数,所以电磁转矩Tm与交轴电流iq呈线性关系,即直接通过调节iq的大小就可以控制电机输出的电磁转矩,同时也可以得出id=0的控制方式可以实现永磁同步电动机输出电磁转矩的线性化控制。
选择id=0的控制方式来实现永磁同步电动机输出电磁转矩的线性化控制,即定子磁场定向控制,此时需要PI控制器、Clarke变换模块、Park变换模块、Park逆变换模块、三相逆变器模块、SVPWM模块、位置与速度检测模块以及电机等这些模块共同来完成。
如图1所示,转子磁场定向控制由外环为速度环,内环为电流环的双闭环结构组成。其中外环控制原理为首先由输入的给定转速nref和检测到的电动机转速n作差后得到的差值,经过速度PI控制器计算出交轴电流的参考输入i*q,交轴电流的参考值i*q再经过电流PI控制器计算出交轴电压uq,交轴电压uq再通过Park逆变换得到两相静止坐标系下的α轴电压uα,uα再经过SVPWM模块和三相逆变器模块得到定子相电流,最后把定子相电流送到电机模块中。
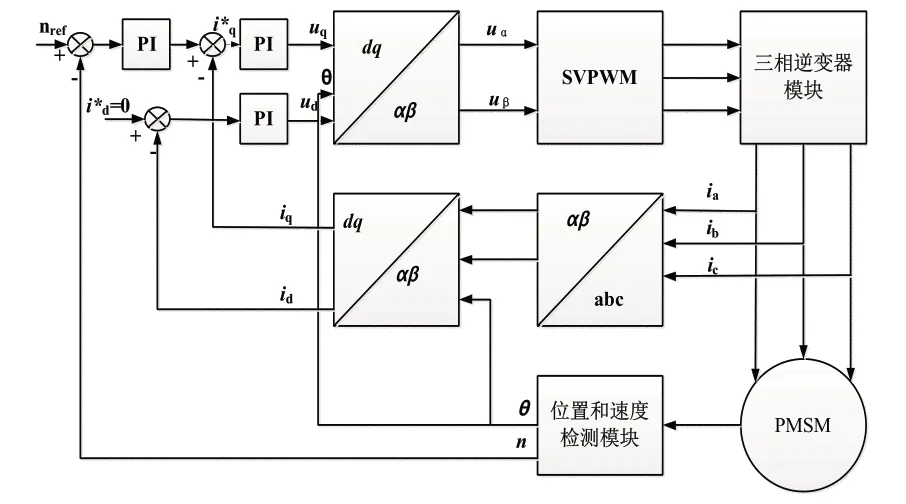
图1 转子磁场定向控制
内环控制原理为首先是由输入的给定电流i*d和反馈的直轴电流id作差后得到的差值,经过电流PI控制器计算出直轴电压ud,直轴电压ud再通过Park逆变换得到两相静止坐标系下的β轴电压uβ,uβ再经过SVPWM模块和三相逆变器模块得到定子相电流,最后把定子相电流送到电机模块中。内环与外环得到的定子相电流iɑ,ib和ic不仅仅只送到电机模块,同时通过Clarke变换转换到两相静止坐标系中,再利用Park变换转换到d-q旋转坐标系中,从而形成反馈的直轴电流id和交轴电流iq完成在该控制系统循环调节的目的。其中SVPWM的主要原理是三相对称的正弦波电压给电动机供电时,以电动机定子绕组产生的理想磁链圆为参考,适当切换逆变器不同开关模式,迫使电动机形成的实际磁链向理想磁链圆靠近[7-8]。
如图2所示,任意电压矢量Uref在某一时刻旋转到任一区域时,均可分解成两个易于分析的相邻的基本矢量,而每个基本矢量的大小都可以用作用时间表示,可以利用基本矢量在作用时间上的不同去合成接近于圆轨迹旋转的电压空间矢量,同时还需把不同开关状态产生的实际磁链与理想磁链圆作比较,通过比较结果确定逆变器的最优开关状态,从而形成驱动电机的PWM波形[8-10]。
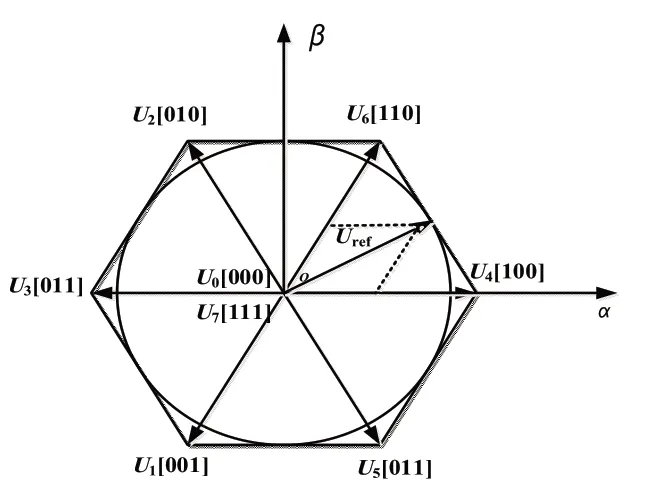
图2 电压空间矢量
2 永磁同步电机矢量控制系统的仿真模型
本文使用MATLAB R2016a版本的Simulink软件来搭建PMSM矢量控制系统仿真模型,如图3所示,主要由PI控制模块、坐标变换模块、SVP⁃WM模块以及永磁同步电动机模块组成。
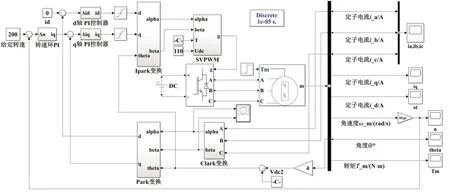
图3 仿真模型
该仿真模型采用id=0的控制策略形成双闭环磁场定向控制系统。电机参数设置如表1所示。仿真模型参数如下:给定转速为200 rad/s,负载转矩设为8 N·m,采样时间Ts=0․000 01 s。速度PI控制器参数为KP1=5,KI1=14;电流PI控制器参数为KP2=5,KI2=7․5。
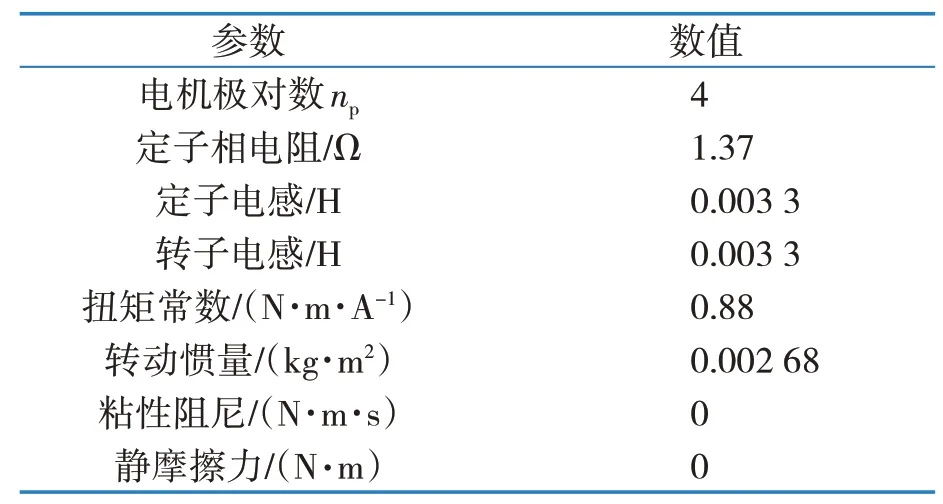
表1 永磁同步电机参数
通过运行上述仿真模型得到定子侧三相电流以及直轴电流id和交轴电流iq的仿真波形,如图4、图5和图6所示。
由图4、图5和图6观察可以发现:定子侧三相电流在0․02 s之后基本呈正弦波形;交轴电流iq在经过刚开始的抖动之后在0․02 s进入稳态,稳态后的交轴电流iq一直保持的是直线,可见系统稳定性能较好;直轴电流id一直在id=0上下之间来回波动,趋于一种临界稳定的状态,基本达到了调节直轴电流趋近于0的预期效果。
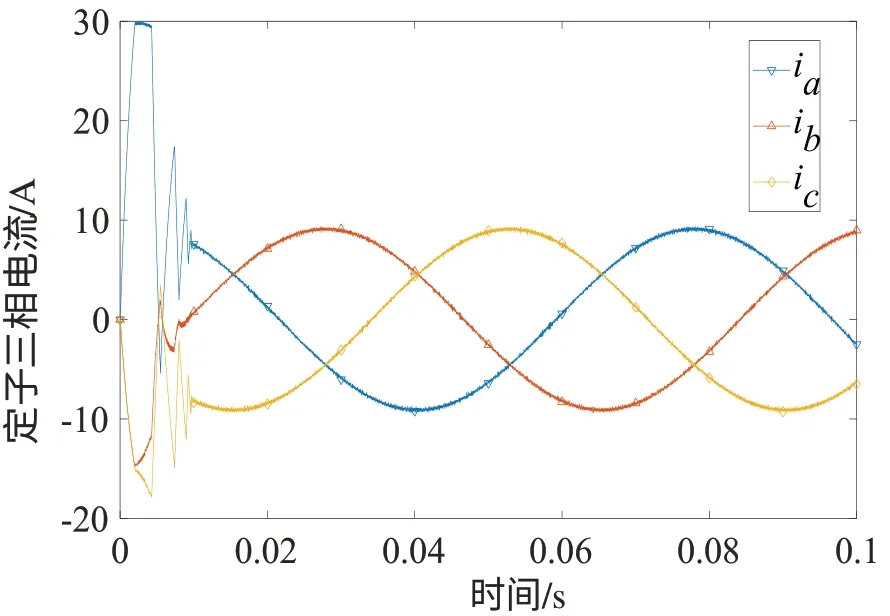
图4 定子侧三相电流波形
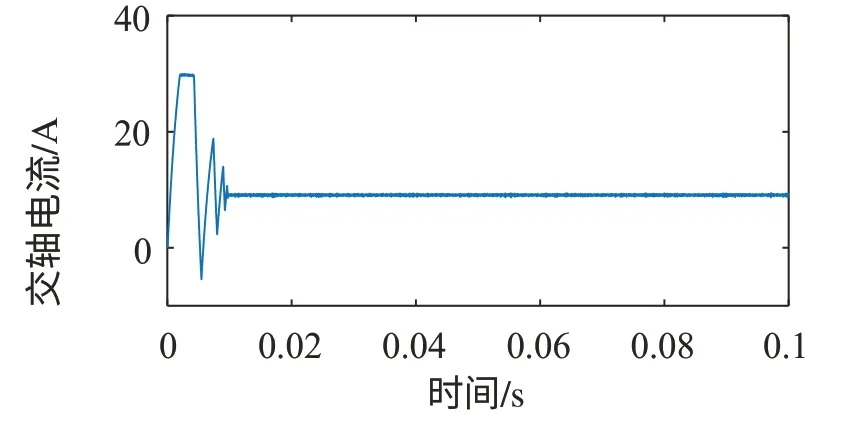
图5 交轴电流iq的波形
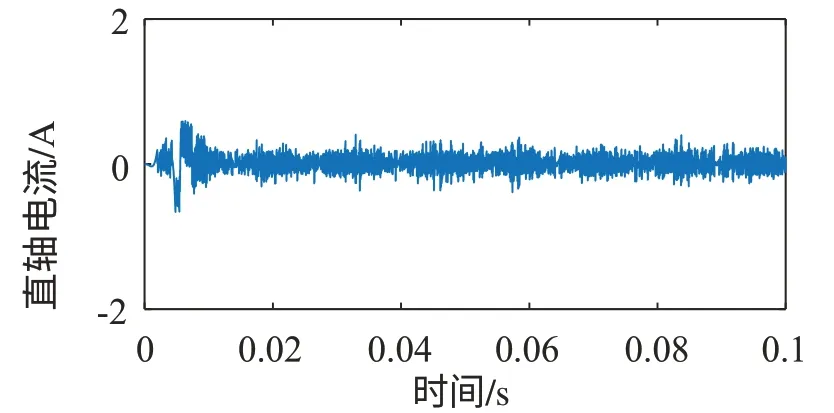
图6 直轴电流id的波形
根据图7可以看出,电机转速在0․01 s后就迅速达到给定转速200 rad/s并保持此转速恒定不变,虽然进入稳态之前有较小的超调量,但稳态之后基本无任何抖动。由图8可以发现电磁转矩Tm与交轴电流iq的波形基本相似,所以也可以采用直接转矩控制的方法来实现对永磁同步电动机的控制。综上所述,试验结果表明整个系统在0․02 s后进入稳定运行状态,其响应速度较快,而且控制精度也较高。

图7 电机转速的波形
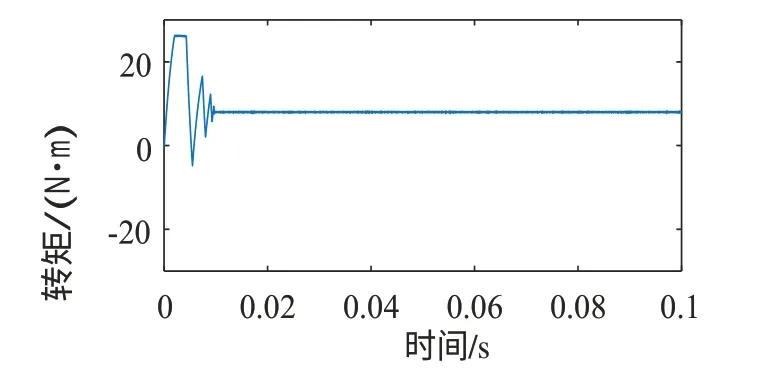
图8 电磁转矩的波形
通过XY Grash模块的图9可以看出,磁链波形基本呈圆形形状,达到了形成圆形磁场的预期目标。

图9 磁链的波形
3 结论
构建了基于MATLAB/Simulink三相永磁同步电机矢量控制系统的高精度仿真模型,通过理论分析和仿真实验得到结论如下:
1)通过分析永磁同步电动机数学模型的原理,阐述直轴电流id与交轴电流iq之间的耦合关系,提出了优化其耦合关系的id=0控制策略。
2)在仿真模型中首先通过添加磁场查询模块和电机参数查询模块,然后利用id=0最优控制策略进行对永磁同步电动机磁链、定(转)子电流、转速、转矩等参数的跟踪控制研究,最后仿真与试验结果不仅验证了id=0最优控制策略的有效性,还验证了本文所提的永磁同步电动机高精度仿真控制模型能够快速达到稳态特性输出的精准度。
3)随着科技的不断进步,各种各样的智能控制算法在电机控制领域也逐步受到关注,因此可以在此研究基础之上,考虑采用智能控制算法来实现永磁同步电机矢量控制或者直接转矩控制。
猜你喜欢
时代汽车(2022年19期)2022-10-18
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
科学家(2022年3期)2022-04-11
电机与控制学报(2018年9期)2018-05-14