基于车载激光扫描点云的铁路隧道横断面提取
2022-06-21 03:03邢庭松彭金涛张同刚
技术与市场 2022年6期
邢庭松,彭金涛,张同刚
(1.中铁隧道集团三处有限公司,广东 深圳 518051; 2.西南交通大学,四川 成都 610031)
0 引言
车载三维激光扫描技术具有非接触、效率高、精度高等优势,能够快速获取对象的海量点云,受环境影响较低,在铁路隧道的限界分析、收敛分析等方面具有很好的应用潜力。基于车载隧道Lidar点云进行铁路限界分析和收敛分析中的一个关键环节是提取隧道横断面。
为快速提取隧道横断面,Kang等[1]采用随机采样一致性(RANdom SAmple Consensus,RANSAC)提取圆形隧道的中轴线,然后获取隧道断面。Han等[2]把隧道点云投影到XOY平面上,根据隧道边界点来确定隧道中线,最后获取隧道横断面。托雷等[3]先采用RANSAC算法和最小二乘平差算法对隧道中轴线进行提取,再采用局部曲面拟合进行隧道横断面提取。现有的这些算法多针对圆形盾构隧道来开展研究。圆形盾构隧道在城市地铁中应用较为广泛,而我国普速铁路和高速铁路中应用较少,绝大部分的铁路隧道断面为马蹄形断面。车载Lidar技术在铁路隧道中应用的一个关键环节就是如何从快速获取海量点云中快速提取隧道的横断面。
本文基于铁路隧道内的轨道,提出了一种快速提取运营铁路隧道的车载Lidar点云断面的快速提取方法,利用实测普速干线隧道铁路和高速铁路隧道的车载Lidar点云对提出的方法进行测试,并分析了提取的断面在隧道限界分析及收敛测量中的可行性和适用性。
1 铁路隧道横断面的快速提取方法
运营铁路隧道中的一条或二条铁路轨道。通常情况下轨道方向与隧道走向基本一致,因而可以基于轨道方向来确定隧道横断面的方向。

1.1 隧道横断面位置和方向的确定
横断面位置和方向的确定是车载Lidar点云提取隧道横断面的关键环节。目前很多相关研究中利用地面激光扫描技术来获取隧道点云,在该技术中可以通过地面控制点来确定隧道断面的位置和方向,而在车载激光扫描中,则难以通过地面控制点来完成该项工作。由于铁路隧道内存在铁路轨道,而轨道的方向与隧道走向基本一致,因此可以通过隧道内轨道方向来确定隧道的方向,进而确定隧道横断面的方向。
对于隧道内任意一点P,首先以P点为中心,半径为r的范围内采用邻域高差算法[4]搜索可能存在的铁路钢轨。假定P点距离钢轨的位置附近,考虑到铁路的轨距为1 435 mm,因此本文将搜索半径r设为1 m,这样仅可能搜索到一条钢轨,搜索到的钢轨的长度小于2 m(见图1)。虽然铁路线路从整体来看存在直线和曲线等不同情况,但由于普速铁路干线铁路和高速铁路的曲线段的曲率半径很大,因而在局部范围内钢轨可以视为一条直线。根据现行规范[5-6],普速铁路干线铁路最小为1 200 m,当钢轨长度为2 m时,曲线的矢高约为0.4 mm,小于Lidar点云的精度,因而当钢轨长度小于2 m时可视为一条直线。高速铁路最小曲率半径更大,达到6 000 m。

图1 隧道横断面位置和方向确定
1.2 基于坐标变换及投影方法的隧道横断面快速生成

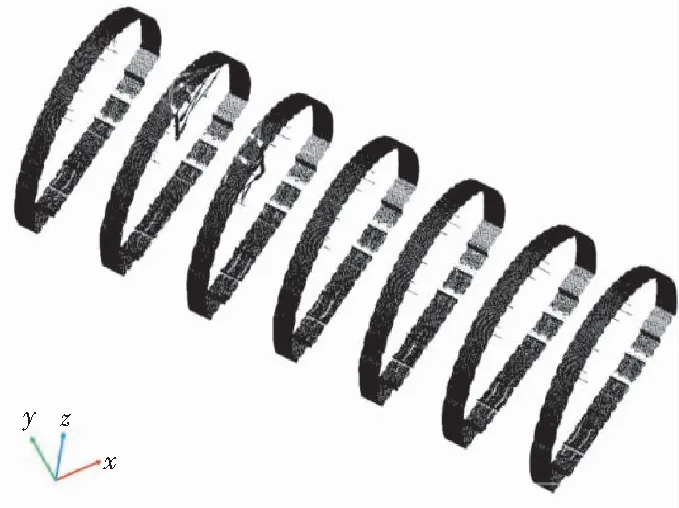
图2 隧道断面缓冲区点云
(1)
vqi=Zqi
(2)
缓冲区内所有点在投影面上的投影点集合{(uqi,vqi)}记为该点处的二维隧道横断面。前者可以用于隧道断面的净空分析等应用,后者则可用于隧道断面的收敛分析等应用。
1.3 隧道横断面点云分类和优化
在隧道全断面收敛测量和分析等应用中,需要考虑隧道内壁边墙的变化的情况,而在以上步骤中提取出来的隧道断面点云除了实际隧道边墙外,还包括边墙上铺设的电缆、信号灯、接触网等设备设施。在隧道收敛测量应用时,在隧道断面提取过程中,需要对各个缓冲区内的隧道点云进行分类,去掉非隧道边强点云后再进行投影,这样提取得到的断面点则全部由边墙点组成。
考虑到即使是曲线隧道,在较短的长度上(投影缓冲区厚度的2倍)也可以视为直线隧道;同时考虑到马蹄形铁路隧道的设计断面一般由3段圆弧组成。根据这些特点,本文采用随机采样一致性(RANSAC)[8]方法,以圆柱面为拟合参数,从缓冲区隧道点云中将内壁边墙上的点标识出来。
由于点云密度比较大,这样获取的隧道断面的点也比较多。为了提高后续收敛分析的效率,可沿着隧道边墙,从左侧到右侧,按照固定间隔(本文设为10 cm)对隧道断面点进行抽稀。
2 试验
2.1 试验数据
试验采用2条运营铁路隧道的实测车载Lidar点云对本文提出的方法进行测试,隧道断面均为马蹄形。一条是普速干线有砟铁路隧道,另一条是无砟轨道高速铁路隧道。采用MS-120车载激光扫描测量系统对隧道进行整体扫描,测量精度优于1 mm,点云密度约为80 pt/m2。
普速铁路隧道宽11.77 m,高8.45 m,采用客货共线电力牵引机车限界;高速铁路隧道宽12.69 m,高9.82 m,采用客运专线铁路机车车辆限界进行限界分析,断面间隔为5 m。
实验中,隧道断面在里程方向的间隔视为5 m,隧道点云的缓冲区厚度设为0.5 m。
2.2 隧道横断面提取
采用本文方法分别对二条隧道点云进行分段和横断面结果列于图3(a)和图4(a)。每个断面采用的缓冲区厚度为0.5 m,缓冲区点云与最终生成的三维断面在图3(b)和图4(b)中,图中红色的为三维断面。相应的二维断面在图3(c)和图4(c)中给出。

图3 普速铁路隧道断面

图4 高速铁路隧道断面
为满足隧道收敛测量和分析的需要,对各缓冲区点云采用RANSAC进行拟合,分别获得3个圆柱面,图中红(R区)、蓝(B区)、绿色(G区)3种颜色的点表示位于这3个圆柱面的点,这3点即为隧道边墙上的点,其余点采用黑色表示。仅利用隧道边墙上的点,生成隧道边墙的二维断面,并按照一定的间隔(10 cm)进行抽稀。普速铁路隧道缓冲区点云分类结果在图5(a)中给出,最终提取的隧道内壁边墙点云结果在图5(b)给出。

图5 普速铁路隧道内壁边墙断面
2.3 基于隧道横断面点云的限界分析和收敛测量
根据提取出来的隧道横断面,结合铁路隧道的建筑限界来开展限界分析,结合隧道的设计断面开展收敛测量。
限界分析采用计算几何中射线法[9-10]依次判断隧道横断面中每个点与隧道基本建筑限界轮廓之间的拓扑关系,如果点在限界范围内,则为侵界,相应的部位标注为“侵界”,如图6所示。
将获取的隧道边墙断面与隧道设计图中的设计断面进行比较,可以得到隧道全断面的形变情况。为突出显示形变效果,将变形量扩大100倍,如图7所示。

图6 限界分析

图7 全断面收敛测量
为了表达隧道断面上各点的变化情况,从断面左下角第一个点起始,沿隧道内壁将整个断面曲线进行展开,显示在图8中。

图8 全断面收敛分析
从图8可以直观地看出隧道各个部位的定量变化情况。
3 车载三维激光扫描云的优势
传统的断面仪、全站仪搭配固定反射棱镜等测量方式在隧道施工测量、断面测量及变形监测中应用较为广泛,但这些传统测量方法的测量成果特征点布设离散、人工测量效率低、成本高等已经不再适应当下隧道施工效率及精度要求。车载三维激光扫描云技术具有非接触、效率高、精度高等优势,能够快速获取对象的海量点云,利用车载三维激光扫描点云的技术获取隧道空间点云数据并进行断面拟合,受环境影响较低,在马蹄形铁路隧道的限界分析、收敛分析等方面具有很好的应用潜力,可实现对隧道空间信息的高精度、高效率、数字化、可视化的测量和分析,进而利用计算机技术实现隧道三维模型重建、隧道断面拟合、隧道变形监测及隧道施工超欠挖分析等工程应用。
4 结语
基于铁路隧道的钢轨,提出了一种铁路隧道车载Lidar点云连续横断面快速提取方法,能够处理马蹄形铁路隧道横断面。
采用邻域高差方法提取钢轨,利用邻域矩阵分析方法确定隧道方向和隧道横断面的方向。
提出了三维隧道断面和二维隧道断面的确定方法。根据马蹄形隧道断面由三段圆曲线组成的特点,利用RANSAC算法,实现了马蹄形隧道内壁边墙点云的分类,在此基础上,实现了隧道内壁边墙断面的提取。
基于实际车载Lidar点云,验证了本文提出算法的有效性,并分析提取的断面在隧道净空分析和收敛分析应用中的适用性。
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
东北水利水电(2022年9期)2022-09-16
交通科技与管理(2021年5期)2021-06-13
农业科技与信息(2021年3期)2021-03-31
水利规划与设计(2020年1期)2020-05-25
中国水能及电气化(2019年2期)2019-03-06
中外公路(2019年5期)2019-01-15
中华老年口腔医学杂志(2016年6期)2017-01-15
山东工业技术(2016年14期)2016-07-05
中国感染控制杂志(2015年7期)2015-12-13