
一种利用弹着点确定临近目标轨迹误差的方法∗
2022-06-21 07:40:22王召刚
舰船电子工程 2022年5期
王召刚
(中国人民解放军92124部队 大连 116023)
1 引言
在对地面攻击的飞行试验中,临近目标轨迹是飞行器全程轨迹中关键的段落。临近目标段轨迹的精度评估对于末制导考核具有重要意义。在参数解算中代入测元精度计算轨迹精度的方法[1~2],只能给出偏差的量级范围,当测元异常时,精度评价失效;“硬”比对采用真值来鉴别轨迹测量误差,同时给出误差的量级和方位,是一种更好的方法。
以弹着点为真值鉴别临近目标点轨迹测量误差是一种“硬”比对方法,方法能同时给出轨迹偏差的量级和方位,这种方法一般也是飞行器试验全程唯一能够进行“硬”比对的时刻。飞行轨迹采用外测结果,比对指标是整个外测测控正常与否、精度如何的重要评价;飞行轨迹采用遥测弹上内测量结果,比对指标是弹上内测量精度指标。利用比对结果修正的遥测内测量飞行轨迹和目标真实坐标计算目标相对飞行器的方位和距离,对于末制导分析具有重要意义。
弹着点[3~4]是飞行器与地面、水面或目标表面的第一交点。测量方法一般有光学测量方法[3~6]、声学测量[7~11]方法,这些测量方法多用来测试弹药射击密集度等指标,应用场景都不是具有导航制导系统的大型飞行器试验。飞行器试验弹着点的获取一般可以采用飞行轨迹和靶面交汇、事后检靶和图像测量三种方法途径。利用轨迹交汇,弹着点计算结果受飞行器轨迹精度影响,不能对轨迹精度做出鉴定;事后检靶的方法受靶面变形的影响存在测量偏差,且实时性不好;图像测量是利用图像内容的相互位置关系由已知来推算未知的方法。文章设计了一种获取弹着点位置的图像测量方法,方法减小靶面变形对测量的影响,是当前飞行器试验弹着点计算精度较高、结果最可靠的方法。
通过在被攻击物体表面一定距离处设置靶墙面,墙面上设置标识点来校准靶墙面在中靶前后的形变影响,可以降低飞行器穿过靶墙面的冲击对弹着点计算的影响。文中,设计了标识点检测算法,利用灰度阈值提取标识点像素,设计图像生成算法计算标识点像素集;以标识点像素集几何中心为标识点像素坐标,设计了标识点标签计算方法;利用中靶前后标识点标签一一对应关系修正弹着点判读的偏差。用弹着点对应时刻的飞行器轨迹速度矢量为法矢量,过弹着点建立虚拟靶面;以飞行轨迹在虚拟靶面穿过点相对弹着点的偏差的距离和方位作为飞行轨迹的“硬”比对结果。
2 模拟靶设置
一般在没有毁伤效果测量的末制导考核试验中,通常以规则形状代替实体靶[12]。在某次飞行器对陆攻击试验中,选取在被攻击目标建筑表面设立一面靶墙,墙上设置十字靶心和标识点,对标识点进行大地测量得到精确大地坐标,标识点的间距要与飞行器的大小相适应,要大于飞行器的直径。在靶墙表面一定距离处设立单目高速摄像测量系统,将图像实时回传指挥中心,试验实施前后单目摄像机尽量保持位置和摄像姿态不变。
图1为建筑表面建立的靶墙上面的标识点设置示意图。共有48个标识点,靶墙背景选择白色,标识点为黑色,靶心为红色中心和橙色十字架组成。以单目摄像机拍摄图片的左上角点为坐标原点O,向右为X轴正向,与X轴垂直向下为Y轴正向建立像素坐标系,标识点具有在OXY坐标系下的像素坐标和试验前大地测量的大地坐标。

图1 靶墙标识点设计示意图
3 弹着点计算方法
为了减小图像拍摄产生的飞行器中靶前后图像畸变,在拍摄飞行器中靶前后,单目摄像机测量参数和位置尽量保持不动。在固定好单目定点摄像机之后,选择距离飞行器中靶时刻前最近的一副图片A和中靶时刻后最近的一副图片B。A和B两幅图片不能有飞行器存在。设摄像机拍摄图像尺寸为M×N,vi,j为图像位置(i,j)处的像素灰度值。
3.1 在中靶前图像上计算标识点像素坐标
Step1 如图2中所示,实验室拍摄的中靶前图片(实际打靶情况与此类似),有效靶墙面(标识点区域)只占图片的一部分,首先需要划定图像上靶面区域。划定有效靶墙面需要在单目高速摄像测量系统的安装过程中进行。划定范围在包含所有标识点基础上,尽量排除靶区周围环境干扰。划定区域为矩形,区域划定后在试验进行过程中不再改变,用式(1)表示划定区域,通过M0、M1、N0和N1四个像素位置确定划定范围对应的子图片V。
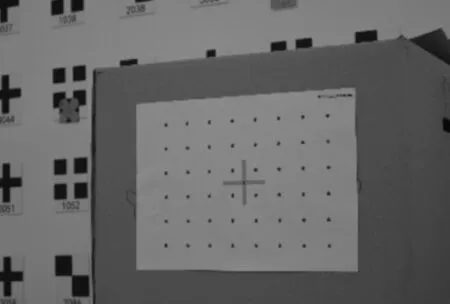
图2 有效靶墙面与周边

其中,1≤M0≤M1≤M,1≤N0≤N1≤N。
Step2 把图片V转换成灰度图片,滤波之后,根据经验设置阈值δ提取标识点像素集。阈值设置要根据标识点像素灰度分布范围在试验前进行设置,文中标识点都为黑色,取δ=100可以提取所有标识点的像素位置集合:

设置提取的标识点像素集个数m=1,下面计算每个标识点的像素集。
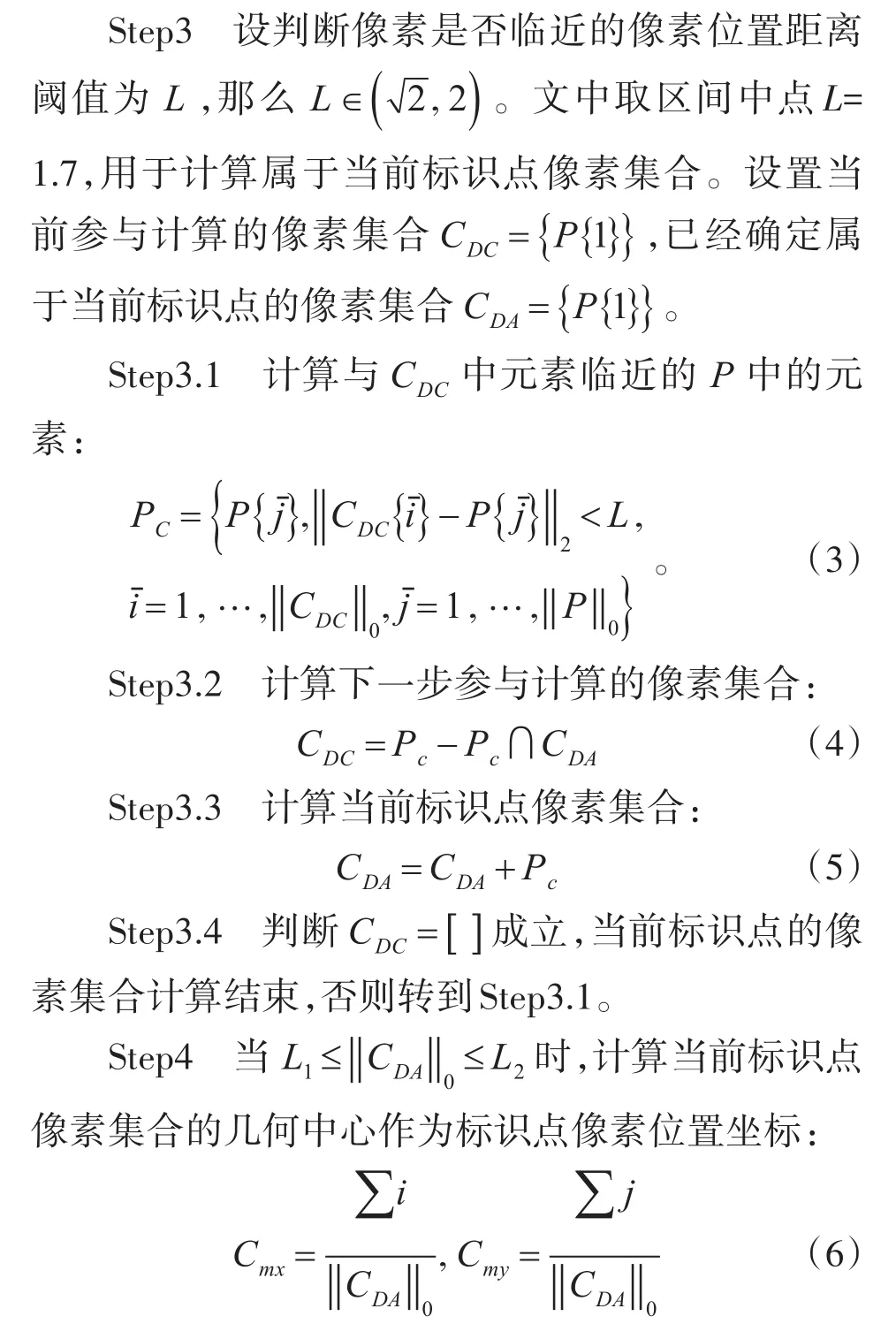
其中L1与L2为标识点像素集元素个数的上下限,能够去除靶心十字、噪声等干扰,式(6)中的分子表示属于当前标识点的所有像素的横向和纵向位置坐标的和。
Step5 计算P=P-CDA,如果P={}结束,否则令m=m+1返回Step3。
其中‖‖0表示计数范数,‖‖2表示欧式距离范数。提取的标识点像素位置坐标集合为

G是提取标识点像素集个数,文中设置的模拟靶中G=48。
Step6 设模拟靶的标识点行数和列数为Gx和Gy,有G=GxGy,下面计算标识点的行列位置标签。首先提取标识点位置坐标沿图片X轴和Y轴的范围为

由于预先设置标识点是等间隔分布的,那么计算相邻标识点分布间隔为

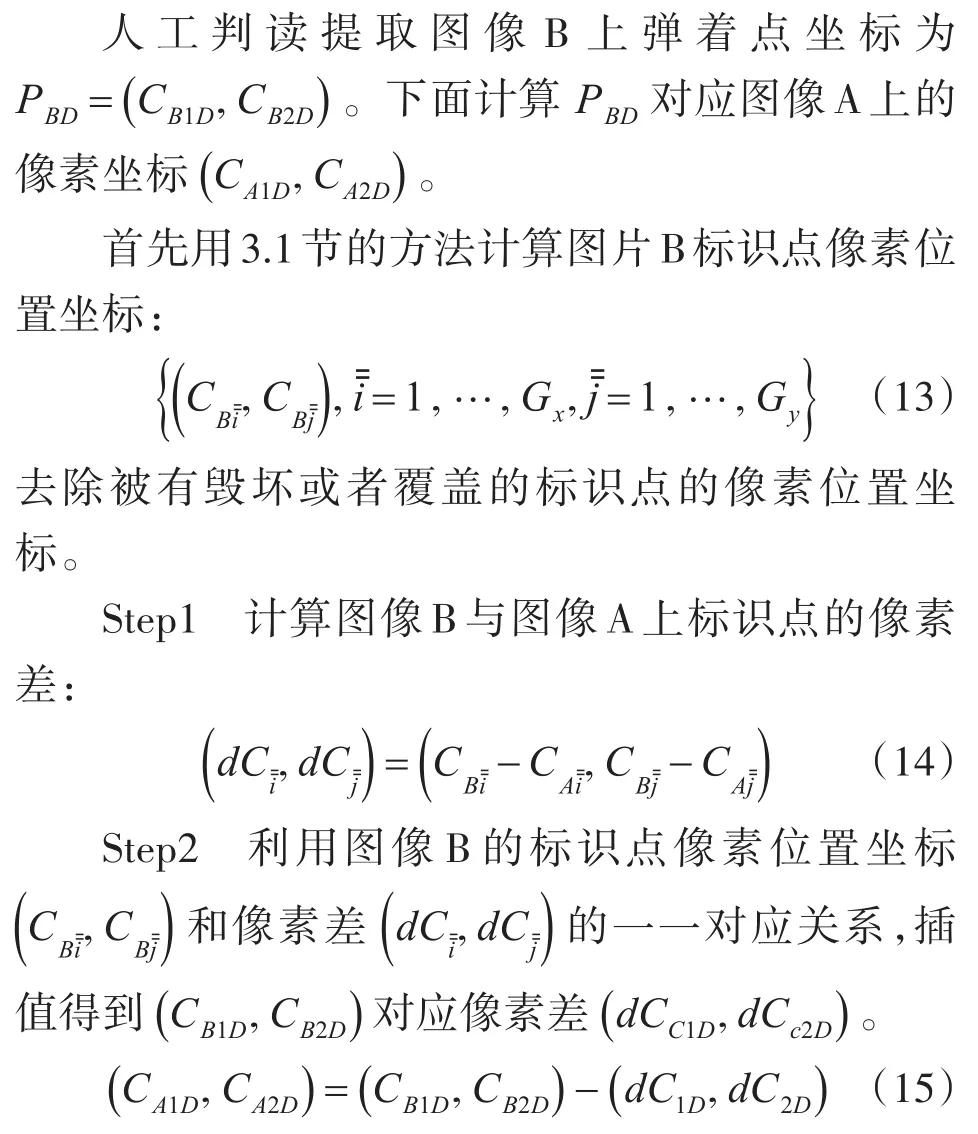
3.2 计算弹着点在中靶前图像上像素坐标
3.3 计算弹着点的大地坐标
图像 A 中每个标识点像素位置 (CAiˉ,CAjˉ)都有与其一一对应的大地坐标,利用这种一一对应关系插值得到(CA1D,CA2D)对应的大地坐标(BD,LD,HD)为弹着点的大地坐标。
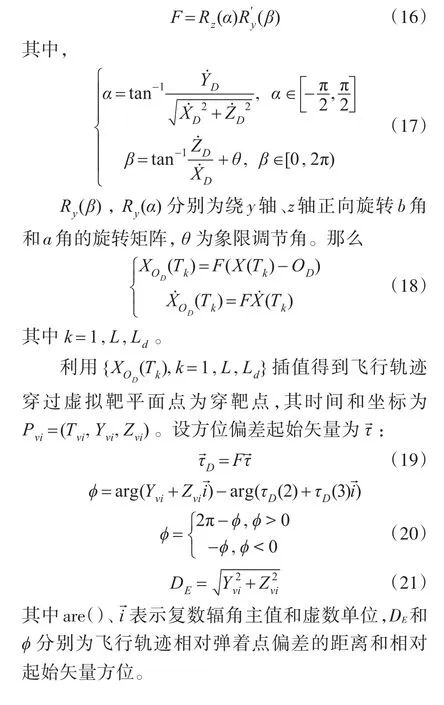
4 计算临近目标轨迹的偏差和方位
5 算例及分析
采用某次飞行试验临近目标段轨迹、待攻击靶心。靶墙面采用实验室缩比图像实验代替,设计标识点如图1所示,假设图像为35m×49m,采用飞行试验中实际使用的靶面标识点大地坐标作为标识点大地坐标,利用实验室打靶实验前后两幅图片提取并计算弹着点大地坐标。
首先进行中靶前后标识点像素集合提取。在中靶后图片上提取标识点像素集受弹着点影响有两种情况需要特殊处理,弹着点覆盖标识点时,取消这个标识点;弹着点与标识点相切时,在中靶后的图像上人工添加空白线段,区分之后在进行标识点提取;图3所示为提取的中靶后的标识点像素集合,其中包含了弹着点和十字靶心,右侧放大图片显示算法区分弹着点和相邻标识点为两个像素集。在图3结果基础上,通过Step4中的像素个数限制,可以去除弹着点和十字靶心的影响。对各个像素集计算几何中心得到图4、图5所示中靶前后的标识点像素位置。

图3 提取的标识点像素集合
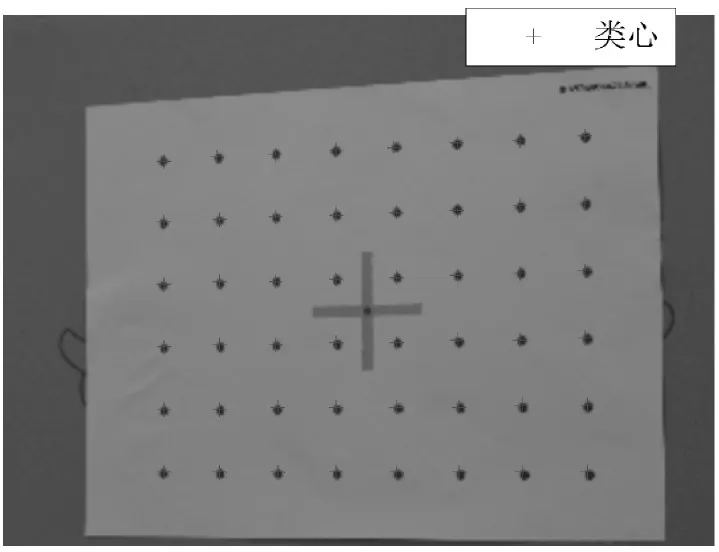
图4 中靶前靶墙上标识点像素位置计算结果
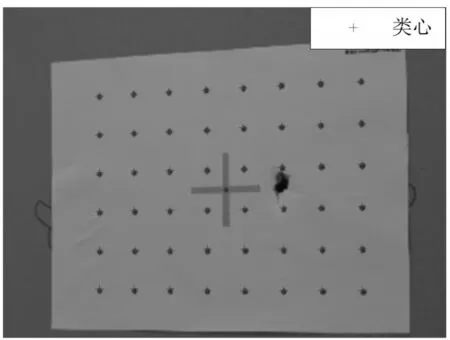
图5 中靶后靶墙上标识点像素位置计算结果
计算中靶前后标识点像素位置差结果如图6所示,位置差变化最剧烈的为弹着点附近的标识点。弹着点误差修正量计算结果如表1所示,其中距离修正量是像素修正量和单位像素代表距离的乘积。
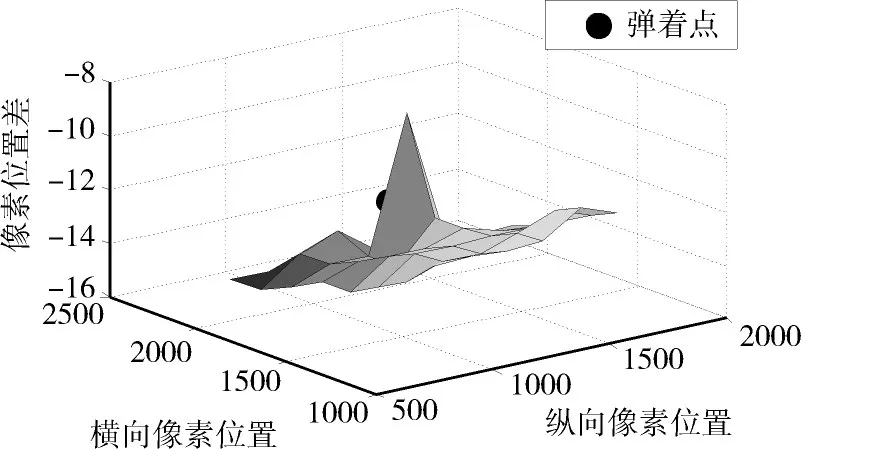
图6 中靶前后对应标识点像素位置差
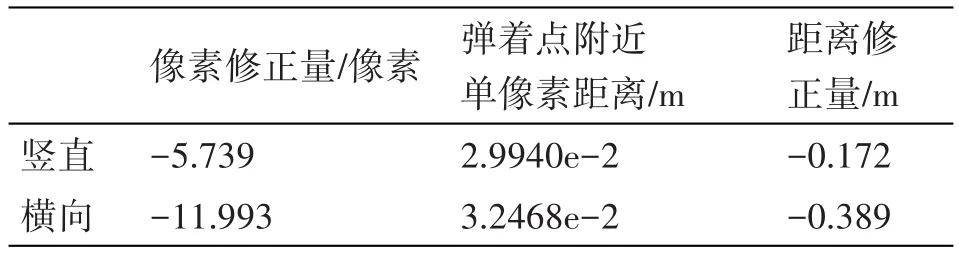
表1 弹着点误差修正结果
利用弹着点像素位置差,得到弹着点在中靶前图像的像素坐标,利用大地坐标和像素坐标的对应关系插值得到弹着点的大地坐标。利用弹着点大地坐标、和弹着点对应的飞行轨迹速度矢量建立虚拟靶面,计算得到飞行轨迹穿靶点相对于弹着点偏差的距离为6.33m,距离起始矢量偏差29.33°。计算结果如图7所示,在当地地面坐标系下绘制的飞行器轨迹末段攻靶示意图,图中显示了靶墙面和虚拟靶面的相对位置示意图。图中的起始矢量为靶墙上竖直矢量在虚拟靶面的投影,是虚拟靶面十字虚线竖直向上方向。
图7 飞行器攻靶轨迹示意图
算例中摄像机拍摄图像维数为2000×2999×3,标志区域竖直方向约855个像素,横向约1073个像素。影响轨迹鉴别精度的因素如表2所示,共有三个误差源。采用蒙特卡洛方法计算得到轨迹偏差估计精度:偏差距离的标准差为0.063m,偏差方向标准差为0.602°。
表2 穿靶点相对弹着点偏差精度误差源
6 结语
文章设计了一种在飞行器攻靶试验中获取弹着点,利用弹着点“硬”比对测量的飞行轨迹末段误差的工程实现方法。比对指标是轨迹相对于弹着点在虚拟靶面上的偏差距离和方位角度。
方法中靶面的标识点样式统一,利用灰度级识别标识点,利用满足灰度级的像素集合元素个数来剔除干扰。实际应用中,绘制靶面要尽量选择韧性较好的材料,这样在试验中没有碎片丢失,在试验之后可以人工复原平整,试验之后检靶得到的弹着点可以与图像计算结果相互校准。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
广东造船(2020年1期)2020-05-03 14:01:49
西安交通大学学报(2019年9期)2019-09-10 04:01:22
指挥控制与仿真(2018年6期)2018-12-03 11:12:08
当代体育科技(2018年24期)2018-06-11 06:30:16
电子制作(2018年2期)2018-04-18 07:13:25
西安交通大学学报(2018年1期)2018-01-12 04:25:54
装甲兵工程学院学报(2016年5期)2016-03-16 04:27:16
兵工学报(2015年10期)2015-11-21 05:45:28
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
