基于输电杆塔区域提取的图像匹配算法
2022-06-21 07:13郭可贵曹瑞万能汪晓尹悦唐旭明熊军林
计算机应用 2022年5期
郭可贵,曹瑞,万能,汪晓,尹悦,唐旭明,熊军林*
(1.国网安徽省电力有限公司 超高压分公司,合肥 230601; 2.中国科学技术大学 信息科学技术学院,合肥 230026;3.国网安徽省电力有限公司 合肥供电公司,合肥 230000; 4.国网安徽省电力有限公司 淮南供电公司,安徽 淮南 232007)(∗通信作者电子邮箱xiong77@ustc.edu.cn)
基于输电杆塔区域提取的图像匹配算法
郭可贵1,曹瑞2,万能3,汪晓1,尹悦1,唐旭明4,熊军林2*
(1.国网安徽省电力有限公司 超高压分公司,合肥 230601; 2.中国科学技术大学 信息科学技术学院,合肥 230026;3.国网安徽省电力有限公司 合肥供电公司,合肥 230000; 4.国网安徽省电力有限公司 淮南供电公司,安徽 淮南 232007)(∗通信作者电子邮箱xiong77@ustc.edu.cn)
针对无人机(UAV)视觉定位过程中传统特征提取与匹配算法匹配质量不佳的问题,提出了一种基于输电杆塔区域提取的图像匹配算法。首先,将图像划分为若干相互重叠的网格区域,并对每个区域采用双层金字塔结构提取特征点,从而保证特征点的均匀分布;其次,使用直线分割检测(LSD)算法提取图像中的直线,从而利用输电杆塔的特殊结构得到输电杆塔的支撑区域;最后,在连续图像中对输电杆塔区域与背景区域内的特征点分别进行匹配,以进一步估计相机运动。在旋转和平移估计实验中,与传统的ORB特征提取与匹配算法相比,所提算法的特征匹配准确率提升了10.1个百分点,相对位姿误差的均值降低了0.049;在UAV巡检实验中,采用所提算法进行UAV轨迹估计的相对误差为2.89%,表明该算法可在实时绕塔飞行过程中实现对UAV位姿的鲁棒、精确估计。
无人机巡检;输电杆塔提取;均匀化特征;图像匹配;运动估计
0 引言
随着我国电力行业的高速发展,超高压、大容量的输电线路在不断地扩建,能源覆盖面积也在增加。输电线路作为电力系统中的关键组成部分之一,其安全稳定的运行直接影响到电力系统的可靠性,故对输电线路的巡检工作至关重要。多旋翼无人机(Unmanned Aerial Vehicle, UAV)由于拥有机动灵活、悬停稳定性好以及便于操控的特点,目前已经广泛应用于电力巡检中[1-2]。无人机自主巡检时,需要实时对自身的空间位置进行估计。但在输电塔附近,无人机因受周围环境影响,局部区域内可能无法接收到全球定位系统(Global Positioning System, GPS)信号,从而导致定位失灵。因此,基于视觉的同时定位与建图(Simultaneous Localization and Mapping,SLAM)技术逐渐在无人机自主巡检中得到应用。
在利用视觉信息进行无人机定位时,首先对拍摄的图像提取特征点并进行特征匹配,进而根据匹配的结果估计无人机位姿。图像中特征点的提取与匹配结果直接影响后续位姿计算的精度。传统的ORB(Oriented FAST(Features from Accelerated Segment Test) and Rotated BRIEF(Binary Robust Independent Elementary Features))[3]特征提取算法采用FAST[4]角点提取算法提取图像中的角点,并结合灰度质心法与旋转不变的二进制描述子提取图像中的特征点。但FAST角点检测算法基于图像中像素灰度值的统计量进行角点筛选,导致提取特征点集中于图像中纹理密集区域,易导致特征匹配时无法有效利用全局特征匹配信息,降低了特征匹配质量。并且由于输电塔的镂空结构,部分输电塔上特征点的描述子包含背景信息,该类特征点参与匹配时同样会降低全局特征匹配的质量。因此在实际巡检中,采用传统ORB特征提取与匹配算法提取并匹配图像中特征点时,易出现图像间特征匹配质量不佳、无人机位姿计算精度不高的问题。针对此问题,本文提出了一种基于输电杆塔区域提取的图像匹配算法,利用杆塔结构特征提取图像中输电杆塔区域,然后基于提取结果对特征点进行分类并完成特征匹配,同时将匹配结果用于无人机的旋转及平移估计中,实验结果验证了本文算法的有效性。
1 相关工作
无人机在电力巡检作业中,可利用基于视觉的SLAM技术进行自身位置与姿态的辅助估计。目前主流的视觉SLAM方法主要分为间接法和直接法[5-6]:间接法通过提取和匹配图像中的显著性特征完成运动估计与定位建图,如基于点特征的ORB-SLAM2[7]、基于线特征的PL-SLAM[8]等;直接法利用图像中各像素间灰度信息的变化关系完成定位与建图,如SVO[9]、DSO[10]、LSD-SLAM[11]等。由于无人机作业场景光照变化较大,对光度误差敏感的直接法不能稳定运行,在此任务中本文选择基于特征的视觉SLAM。而在基于特征点的视觉SLAM中,特征点的提取与匹配结果直接影响后续位姿计算的精度。常用的特征点有尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)[12]、SURF(Speeded Up Robust Features)[13]、ORB等。本文选用具备尺度、光照、旋转不变性,并兼顾实时性的ORB特征完成图像间的特征提取与匹配操作。然而,依据特征提取原理,ORB特征主要分布在图像中纹理丰富的区域,平滑区域的少量特征点对图像间的匹配与运动估计会产生不利影响。
在无人机巡检任务中,对图像中输电杆塔的识别与提取能有效地帮助无人机完成各项巡检任务[14]。Tragulnuch等[15]提出了一种基于视频序列的输电铁塔检测与跟踪方法,利用Canny-Hough变换的方式实现在航拍视频序列中对输电杆塔的高效检测与跟踪。王榆夫等[16]利用杆塔上钢条互相平行且与主轮廓相接的特性提取了杆塔的主轮廓与中轴,通过计算杆塔中轴与地面水平参考线的夹角完成对杆塔的倾斜程度的判断。徐晶等[17]提出了一种检测铁塔上鸟巢的方法,利用图像中的交叉线段确定杆塔区域,在杆塔区域内根据描述鸟巢的惯性矩特征量检测鸟巢。该方法只在杆塔区域内检测鸟巢,降低了背景区域对检测结果的干扰,能有效地检测出鸟巢区域,但其确定杆塔区域的方法忽略了背景中存在的干扰线段,导致杆塔识别的结果有较大误差。
基于文献[17]的研究,本文提出了一种改进的输电杆塔提取方法,并将之应用于特征匹配过程中,进而提升了图像间特征匹配质量及运动估计的精度。
2 技术方案
在输电杆塔巡检任务中,针对传统ORB特征提取与匹配算法在室外场景下特征匹配质量不佳,易导致在视觉跟踪时无人机位姿计算精确度较低的问题,本文提出了一种基于输电杆塔区域提取的图像匹配算法。首先,对图像进行网格划分提取均匀分布的ORB特征点;然后,提取图像中的输电杆塔区域。将提取的特征点分为输电杆塔区域特征点与背景区域特征点两类,对两类特征点分别进行匹配,得到图像间特征匹配结果。本文算法的具体流程如图1表示。

图1 所提基于输电杆塔区域提取的特征匹配算法流程Fig. 1 Flow chart of proposed feature matching algorithm based on transmission tower area extraction
本文的主要工作如下:
1)提取图像均匀分布的特征点,能有效地提高旋转估计的计算精度及鲁棒性。
2)结合图像中的线段特征提出了一种提取输电杆塔区域的方法,同时根据图像中的输电杆塔区域对均匀分配的特征点进行分类并完成特征匹配,提高了特征匹配准确率以及平移估计的计算精度。
2.1 特征点的均匀提取
传统的ORB特征提取算法获得的特征点主要分布在图像中纹理密集的区域,而无人机拍摄的照片视野开阔,纹理分布集中,平滑区域较多,提取出的特征点会集中在局部区域。当无人机发生大角度的旋转运动时,大量特征点在运动后消失,导致匹配结果中出现大量误匹配,运动估计的计算精度也因此降低。在此情况下,可对图像提取全局均匀分布的特征点,提高匹配质量及后续运动估计的精度。
从图2可知,传统算法提取的特征点在图像中的分布并不均匀,集中在输电杆塔、房屋等局部区域,在输电线路、树木等区域均无法有效提取特征点,而本文算法则实现了特征点在图像上的均匀分布。

图2 不同算法特征点分布情况Fig. 2 Distribution of feature points of different algorithms
2.2 基于输电杆塔区域提取的特征匹配
输电杆塔上提取的特征点由于杆塔的镂空性质包含部分背景信息,对无人机拍摄的照片进行特征匹配与运动估计时,杆塔区域上的特征点与背景区域上的特征点会相互影响对方的匹配结果,导致图像间整体的特征匹配质量不佳,进而影响运动估计的鲁棒性和稳定性。为提高特征匹配质量,本文提出了一种基于输电杆塔区域提取的特征匹配方法。利用本文提出的输电杆塔区域提取方法提取图像中的输电杆塔区域,并基于此对图像中的特征点进行分类,进而完成图像间的特征匹配,提高了图像全局的特征匹配质量。
2.2.1 输电杆塔区域提取方法
提取图像中的输电杆塔区域是对图像中的特征点进行分类与匹配的基础。由于杆塔结构存在大量的交叉线段,文献[17]提出了可以根据图像中交叉斜线的数量来确定杆塔区域,并采用块状区域进行前景的分割;但其忽略了图像中存在的噪声线段,并且在进行杆塔区域判定时,只要求斜上与斜下方向线段超过一定数量要求即可,并未考虑线段交叉结构的对称性对线段数目的约束,导致大量背景区域被误判成杆塔区域。针对这一问题,本文提出了一种新的方法使输电杆塔区域的提取结果更为精细与准确。
在实际环境中,由于图像中纹理信息丰富的区域常易提取出大量的噪声线段,为减少噪声线段对输电杆塔提取结果的影响,需预先对输入的图像进行滤波平滑处理。由于输电杆塔区域内像素点的方差高于噪声线段区域像素点的方差,因此本文选用双边滤波器对图像进行滤波,使得在滤波过程中,噪声线段被去除,输电杆塔上的线段被保留。本文采用直线分割检测(Line Segment Detector, LSD)算法[18]提取图像中的线段,并根据线段的角度对线段进行分类:
由交叉线段的对称性可知,杆塔上斜上线段与斜下线段的数目应当相近,因此本文根据图像中任一区域内的斜上线段数目M1与斜下线段数目M2提出杆塔区域判定条件。图像中符合式(1)的区域即为输电杆塔区域。
算法1给出了提取图像中输电杆塔区域的具体步骤,图3给出了杆塔提取结果的可视化展示。从图3可知,本文算法能够有效地提取图像中的输电杆塔区域。
算法1 输电杆塔区域提取算法。
2)采用LSD算法提取图像中的线段
4) for 图像内的每个区域 do
5) for 分块内每条直线 do
6) 计算线段的角度
7) 根据线段的角度对线段进行分类
8) end for
12) end if
13) end for
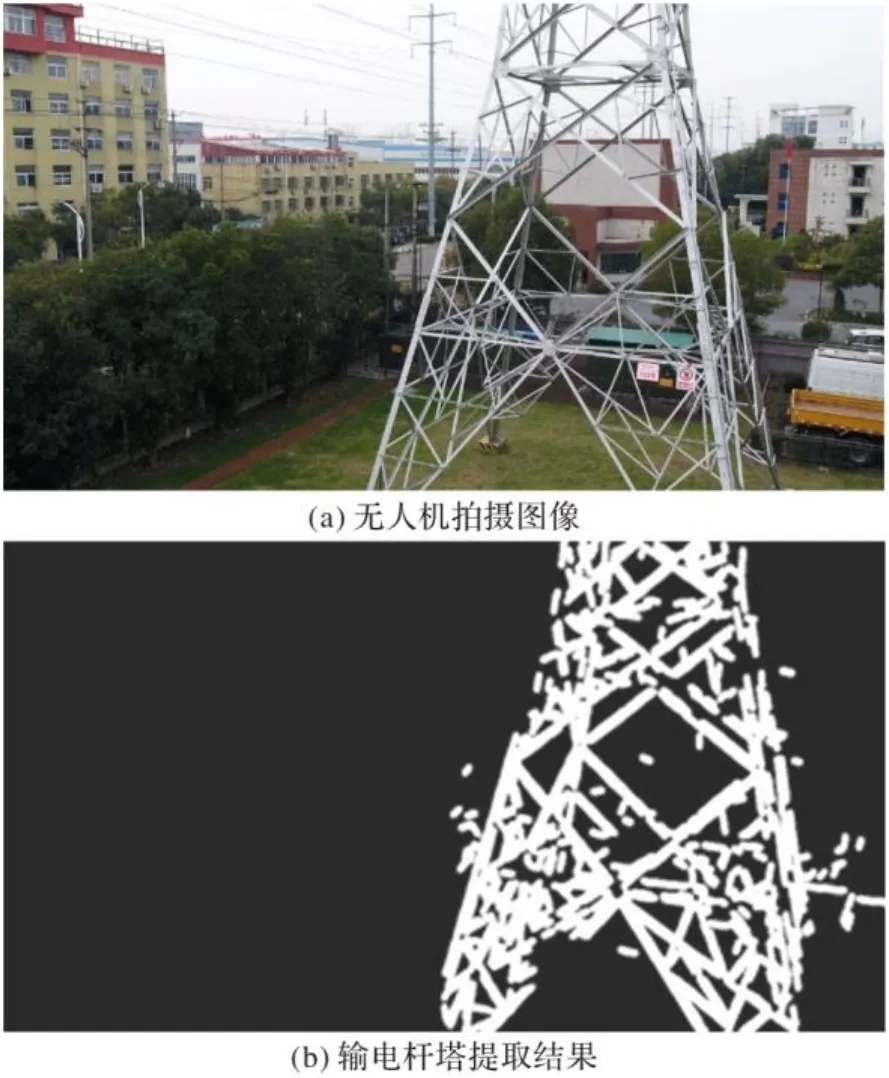
图3 无人机拍摄图像及输电杆塔提取结果Fig. 3 Image taken by UAV and transmission tower extraction result
2.2.2 特征点的分类与匹配
为了提升图像间的特征匹配质量,在提取出图像中的输电杆塔区域后,本文提出了一种特征匹配的方法。首先,遍历图像中所有特征点,根据特征点所处位置构造输电杆塔支撑区域特征点集合与背景区域特征点集合。其次,对任意两张图像与图像,将两张图像的输电杆塔支撑区域特征点集合与背景区域特征点集合分别进行特征匹配。
输电杆塔区域在图像整体中面积小,特征点数目较少,对该区域内特征匹配对筛选的要求可更为宽松,本文将输电杆塔支撑区域特征点集合中匹配对的筛选阈值设置为。背景上的特征点匹配对数目较多,为降低背景区域的误匹配对数目,本文将背景区域特征点集合中匹配对的筛选阈值设置为,图3为采用本文所提算法对无人机拍摄图像提取输电杆塔的结果。图4(a)、图4(b)分别展示了图像中输电杆塔区域及背景区域的特征匹配结果,可知杆塔区域与背景区域的特征点均得到了良好匹配。

图4 基于输电杆塔和背景特征点的分类与匹配结果示意图Fig. 4 Schematic diagram of classification and matching results based on feature points of transmission tower and background
3 运动估计
本文将特征匹配的结果应用于图像间的运动估计中来验证本文算法的性能。图像间的运动估计包含旋转估计与平移估计两部分。
3.1 旋转估计
式中:K为相机的内参;E为图像之间的本质矩阵;R与t为相机之间的旋转与平移。
由式(2)~(3)可知,本质矩阵由对极约束确定且具有尺度等价性。由于旋转平移共有6个自由度,因此本质矩阵实际上有5个自由度,即最少可通过5对正确匹配进行求解。考虑到本质矩阵内部的非线性性质,本文采用八点法[19-20]对其进行线性化并求解本质矩阵,从而精确解算出图像间的旋转变换。
3.2 平移估计方法
对于两张连续图像,若第一幅图像中特征点的空间3D位置已知,则根据两张图像特征点的匹配关系得到若干对3D-2D点的匹配关系,进而可构造求解相机位姿的PnP(Perspective-n-Point)问题。本文采用EPnP(Efficient PnP)方法[21]进行求解,将获得的位姿作为初始值最小化重投影误差e,得到优化后的精准平移量。
式中:n为匹配特征点的总个数;ui为第i个匹配特征点的像素坐标;表示相机的位姿;Pi为第i个匹配特征点对应的空间坐标;si表示第i个匹配特征点的深度;为其根据求解位姿投影后的像素坐标。
在实际估计图片间的平移变换过程中,图像之间可提供的匹配对数远超过需要的匹配对数。在提供的特征匹配对中,正确匹配对占比越多,求解出位姿精度也更高,估计出的平移也越精准。
4 实验与结果分析
为验证本文算法的性能,针对旋转和平移估计分别进行对比实验。定义传统的ORB特征提取与匹配方法为M1,提取图像均匀分配的ORB特征点后直接进行特征匹配的方法为M2,提取图像均匀分配的ORB特征点后结合输电杆塔区域进行特征点分类与匹配的方法为M3。
4.1 旋转估计
在实际的输电杆塔环境中,保持无人机位置不变,将云台翻滚角设置为0°,调整云台相机的偏航角与俯仰角以进行组合拍摄,共拍摄25张,分别采用M1、M2算法提供的特征匹配结果估计图片的旋转。
图5为旋转估计的均值随特征点数目与旋转角度的变化情况(定点旋转分别为6°、12°、18°、24°),横坐标表示提取的特征点数目,纵坐标表示估计的旋转角度。由图5中可知,在旋转角度较小时,M1、M2均能获得稳定的估计效果;当旋转角度进一步增大时,M1收敛性被破坏,而本文提出的M2算法能在特征点数量较少时得到收敛至误差范围内的估计结果。综上可知,在无人机运动过程中,本文提出的M2算法对旋转估计问题具有更强的鲁棒性和准确性。

图5 不同角度下旋转估计的均值随特征点数目的变化情况Fig. 5 Variation of mean value of rotation estimation with feature points at different angles
4.2 平移估计
为验证本文提出的基于输电杆塔区域提取的特征点分类与匹配方法对提升平移估计精度的有效性,本文使用无人机拍摄了5组平移图片序列进行实验,每组包含4张图片,构成3段平移。分别采用M1、M2、M3三种算法计算特征匹配的准确率,并将特征匹配结果用于图片间的平移估计。由于单目相机不具备尺度信息,且实验数据中不包含旋转运算,本文采用相对位姿误差(Relative Pose Error, RPE)的均方根误差(Root Mean Squared Error, RMSE)在平移变化中的退化形式来评价算法效果。
取拍摄图像位置所处的GPS坐标作为参考真实值,图6给出了三种算法下的轨迹估计,表1给出了三种算法的匹配准确率以及用于平移估计时的相对位姿误差。由图6可知,与M1算法相比,本文所提出的M2、M3算法下的运动轨迹更接近真实值。由表1可知,本文所提M2与M3算法的特征匹配准确率相较于M1算法分别提升了1.8个百分点与10.1个百分点。此外,与M1算法相比,M2与M3算法用于平移估计时的相对位姿误差的均值分别降低了0.016 5与0.049 0,表明本文算法能在不同程度上通过提升特征匹配准确率提高估计精度。

图6 不同算法的轨迹对比Fig. 6 Trajectory comparison of different algorithms
4.3 巡检应用
为验证本文所提算法的实际应用价值,以ORB-SLAM2为运行平台,对本文算法在输电杆塔环境下的定位效果进行了测试。实验过程中,无人机在输电杆塔旁起飞,绕塔飞行一段距离后降落,由本文算法求解到的轨迹和由GPS记录的真实轨迹如图7所示。由图7可知,本文算法得到的轨迹与真实轨迹相近,随着飞行距离的增加,误差有增大的趋势,最终降落点的相对误差为2.89%,在允许接受的误差范围内。

表1 匹配准确率与平移误差对比Tab. 1 Comparison of matching accuracy and translation error

图7 本文算法在输电杆塔巡检环境下的轨迹和真实轨迹Fig. 7 Trajectory of proposed algorithm and real trajectory in transmission tower inspection environment
5 结语
为了提高无人机视觉定位精度,本文提出了一种基于输电杆塔区域提取的图像匹配算法。该算法在图像中提取均匀分布的ORB特征点,有效提高了后续旋转估计的计算精度及鲁棒性;同时依据输电杆塔上存在大量交叉线段的特殊性质确定图像中输电杆塔区域,进而对特征点分类并完成特征匹配,提高了特征匹配的准确率及后续平移估计的计算精度。实验结果表明,在输电杆塔的巡检任务中,采用本文算法结合ORB-SLAM2框架对无人机进行定位时效果良好,在输电巡检领域中具有实际应用价值;但是本文算法中的直线提取过程十分耗时,很难达到实时性的要求。在以后的工作中,将进一步考虑采用更高效的直线检测技术提高算法的运行效率。
[1] 隋宇,宁平凡,牛萍娟,等.面向架空输电线路的挂载无人机电力巡检技术研究综述[J].电网技术,2021,45(9):3636-3648.(SUI Y, NING P F, NIU P J, et al. Review on mounted UAV for transmission line inspection [J]. Power System Technology, 2021, 45(9): 3636-3648.)
[2] 吴立远,毕建刚,常文治,等.配网架空输电线路无人机综合巡检技术[J].中国电力,2018,51(1):97-101,138.(WU L Y, BI J G, CHANG W Z, et al. Research of unmanned aerial vehicle comprehensive inspection for distribution network overhead transmission lines [J]. Electric Power, 2018, 51(1): 97-101, 138.)
[3] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF [C]// Proceedings of the 2011 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2011: 2564-2571.
[4] ROSTEN E, DRUMMOND T. Machine learning for high-speed corner detection [C]// Proceedings of the 2006 European Conference on Computer Vision, LNCS 3951. Berlin: Springer, 2006: 430-443.
[5] 高翔,张涛,刘毅,等.视觉SLAM十四讲从理论到实践[M].北京:电子工业出版社,2017:132-204.(GAO X, ZHANG T, LIU Y, et al. Fourteen Chapters of Visual SLAM: from Theory to Practice [M]. Beijing: Publishing House of Electronics Industry,2017: 132 -204.)
[6] 王霞,左一凡.视觉SLAM研究进展[J].智能系统学报,2020,15(5):825-834.(WANG X, ZUO Y F. Advances in visual SLAM research [J]. CAAI Transactions on Intelligent Systems,2020, 15(5): 825-834.)
[7] MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo and RGB-D cameras [J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262.
[8] PUMAROLA A, VAKHITOV A, AGUDO A, et al. PL-SLAM: real-time monocular visual SLAM with points and lines [C]// Proceedings of the 2017 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2017:4503-4508.
[9] FORSTER C, PIZZOLI M, SCARAMUZZA D. SVO: fast semi-direct monocular visual odometry [C]// Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Piscataway: IEEE,2014: 15-22.
[10] ENGEL J, KOLTUN V, CREMERS D. Direct sparse odometry [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625.
[11] ENGEL J, SCHÖPS T, CREMERS D. LSD-SLAM: large-scale direct monocular SLAM [C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8690. Cham: Springer, 2014: 834-849.
[12] LOWE D G. Distinctive image feature from scale-invariant key points [J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[13] BAY H, TUYTELAARS T, GOOL L van. SURF: speeded up robust features [C]// Proceedings of the 2006 European Conference on Computer Vision, LNCS 3951. Berlin: Springer, 2006: 404-417.
[14] 李振宇,郭锐,赖秋频,等.基于计算机视觉的架空输电线路机器人巡检技术综述[J].中国电力,2018,51(11):139-146.(LI Z Y, GUO R, LAI Q P, et al. Survey of inspection technology of overhead transmission line robot based on computer vision [J]. Electric Power, 2018, 51(11): 139-146.)
[15] TRAGULNUCH P,CHANVIMALUANG T, KASETKASEM T,et al. High voltage transmission tower detection and tracking in aerial video sequence using object-based image classification [C]// Proceedings of the 2018 International Conference on Embedded Systems and Intelligent Technology and the 2018 International Conference on Information and Communication Technology for Embedded Systems, Piscataway: IEEE,2018: 1-4.
[16] 王榆夫,韩军,赵庆喜,等.基于无人机图像的电力杆塔倾斜检测[J].计算机仿真,2017,34(7):426-431.(WANG Y F, HAN J,ZHAO Q X, et al. The method of power transmission tower inclination detection based on UAV image [J]. Computer Simulation, 2017, 34(7): 426-431.)
[17] 徐晶,韩军,童志刚,等.一种无人机图像的铁塔上鸟巢检测方法[J].计算机工程与应用,2017,53(6):231-235.(XU J, HAN J, TONG Z G, et al. Method for detecting bird’s nest on tower based on UAV image [J]. Computer Engineering and Applications, 2017, 53(6): 231-235.)
[18] GIOI R G von, JAKUBOWICZ J, MOREL J M, et al. LSD: a line segment detector [J]. Image Processing on Line, 2012, 2: 35-55.
[19] HARTLEY R I. In defense of the eight-point algorithm [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1997, 19(6): 580-593.
[20] LONGUET-HIGGINS H C. A computer algorithm for reconstructing a scene from two projections [J]. Nature, 1981, 293(5828): 133-135.
[21] LEPETIT V, MORENO N F, FUA P. EPnP: an accurateO(n) solution to the PnP problem [J]. International Journal of Computer Vision, 2009, 81(2): Article No.155.
Image matching algorithm based on transmission tower area extraction
GUO Kegui1, CAO Rui2, WAN Neng3, WANG Xiao1, YIN Yue1,TANG Xuming4, XIONG Junlin2*
(1.Ultra High Voltage Company,State Grid Anhui Electric Power Company Limited,Hefei Anhui230601,China;2.School of Information Science and Technology,University of Science and Technology of China,Hefei Anhui230026,China;3.Hefei Electric Power Supply Company,State Grid Anhui Electric Power Company Limited,Hefei Anhui230000,China;4.Huainan Electric Power Supply Company,State Grid Anhui Electric Power Company Limited,Huainan Anhui232007,China)
In order to solve the problem of low matching quality of the traditional feature extraction and matching algorithm in Unmanned Aerial Vehicle (UAV) visual localization, a new image matching algorithm based on transmission tower area extraction was proposed. Firstly, the image was divided into several overlapping grid areas, and the feature points were extracted by a two-layer pyramid structure for each area to ensure the uniform distribution of feature points. Then, the Line Segment Detector (LSD) algorithm was used to extract the lines in the images, the transmission tower support areas were extracted on the basis of special structure of transmission tower. Finally, the feature points in the transmission tower areas and the background areas were matched respectively in continuous images to further estimate the camera motion. In the rotation and translation estimation experiment, compared with the traditional Oriented Features from Accelerated Segment Test(FAST) and Rotated Binary Robust Independent Elementary Features (BRIEF) (ORB) feature extraction and matching algorithm, the proposed algorithm has the feature matching accuracy improved by 10.1 percentage points, the mean value of relative pose error reduced by 0.049. In the UAV inspection experiment, the relative error of the UAV trajectory estimation by using the proposed algorithm is 2.89%, which indicates that the proposed algorithm can achieve the robust and accurate estimation of the UAV’s pose during the real-time flying around the tower.
Unmanned Aerial Vehicle (UAV) inspection; transmission tower extraction; homogenized feature; image matching; motion estimation
TP391.4;TM75
A
1001-9081(2022)05-1591-07
10.11772/j.issn.1001-9081.2021050796
2021⁃05⁃17;
2021⁃12⁃22;
2021⁃12⁃23。
2019—2020年安徽省电力有限公司科技项目(5212F018008S)。
郭可贵(1985—),男,安徽淮南人,工程师,主要研究方向:输电线路无人机巡检; 曹瑞(1997—),男,安徽六安人,硕士研究生,主要研究方向:视觉同时定位与建图; 万能(1990—),男,江西临川人,工程师,硕士,主要研究方向:输电线路无人机巡检; 汪晓(1972—),男,安徽合肥人,高级工程师,硕士,主要研究方向:输电线路运维管理; 尹悦(1991—),男,安徽淮南人,工程师,主要研究方向:输电线路无人机巡检; 唐旭明(1965—),男,安徽淮南人,高级工程师,主要研究方向:输电线路无人机巡检; 熊军林(1977—),男,河南郑州人,教授,博士,主要研究方向:自动控制。
This work is partially supported by 2019—2020 Science and Technology Project of Anhui Electric Power Company Limited (5212F018008S).
GUO Kegui, born in 1985, engineer. His research interests include transmission line unmanned aerial vehicle inspection.
CAO Rui, born in 1997, M. S. candidate. His research interests include visual simultaneous localization and mapping.
WAN Neng, born in 1990, M. S., engineer. His research interests include transmission line unmanned aerial vehicle inspection.
WANG Xiao, born in 1972, M. S., senior engineer. His research interests include transmission line operation and maintenance management.
YIN Yue, born in 1991, engineer. His research interests include transmission line unmanned aerial vehicle inspection.
TANG Xuming, born in 1965, senior engineer. His research interests include transmission line unmanned aerial vehicle inspection.
XIONG Junlin, born in 1977, Ph. D., professor. His research interests include automatic control.
猜你喜欢
卫星应用(2022年1期)2022-03-09
中国科技纵横(2020年13期)2020-12-11
初中生学习指导·提升版(2020年11期)2020-09-10
机电信息(2020年12期)2020-06-29
现代信息科技(2020年22期)2020-06-24
山东工业技术(2019年16期)2019-07-19
读写算·小学中年级版(2017年1期)2017-02-28
初中生世界·七年级(2016年2期)2016-03-03
科技与创新(2015年9期)2015-06-02
小雪花·成长指南(2015年5期)2015-05-25