低地板有轨电车ATO精准停车控制策略研究
2022-06-20 12:55彭学前曾春军武小平
技术与市场 2022年6期
彭学前,罗 超,曾春军,武小平
(中车株洲电力机车有限公司,湖南 株洲 412000)
0 引言
随着我国经济快速发展,城市轨道交通系统也得以综合发展,尤其是低地板有轨电车,由于其具有节能环保、满足自动化运营需求等特点,在旅游观光区、机场快捷线等方面运用较多。
低地板有轨电车作为一种城市轨道交通工具,为提高线路运营效率及降低司机疲劳驾驶带来的风险,越来越多的运营方采用ATO运行方式。安全合理的ATO精准停车控制策略不仅关系着乘客乘车舒适度,还影响着线路运营效率。现有的低地板有轨电车通过ATO运行方式,有着停车冲击大的特点,同时在具有站台屏蔽门对标的运营环境中存在冲标及欠标问题,导致站台屏蔽门无法自动打开,需要将ATO运行方式切换为手动驾驶方式后,再通过司机手动进行站台屏蔽门对标,影响了列车运营效率。
本文以七模块低地板有轨电车为例,利用列车MVB网络,提出低地板有轨电车ATO精准停车控制策略,充分发挥列车制动力配置及管理、电液转换及车载控制器(VOBC)控制保持制动方式,提高乘客乘车舒适度及列车运营效率。
1 列车配置和制动系统配置
七模块低地板有轨电车配置采用3M1T3F单编组方式,具体编组顺序为Mc1—F1—M—F3—Tp—F2—Mc2,其中Mc1、Mc2表示带司机室的动车,M表示动车,Tp表示拖车,F1、F2、F3表示浮车,具体如图1所示。

图1 七模块低地板有轨电车编组图
制动系统配置主要由电制动、液压制动和磁轨制动组成。其中,Mc1、Mc2、M三个动车液压制动系统由3套相互独立的被动式电液控制单元、电子制动控制单元(EBCU)和制动夹钳等部件组成,Tp车液压制动系统由主动式电液控制单元、电子制动控制单元和制动夹钳等部件组成。
2 ATO精准停车控制策略
针对七模块低地板有轨电车在具有站台屏蔽门对标的运营环境中,ATO进行精确停车时,列车充分发挥制动力配置及控制进行预减速、电液转换,直至停车进入保持制动。ATO输出制动指令到停车过程的时序(见图2)如下:T1时间是ATO发出制动命令到车辆控制系统(TCMS)收到制动命令时间,T2时间是TCMS收到制动命令到列车EBCU开始施加制动力时间,T3时间是列车EBCU开始施加制动到制动力达到预期值时间。
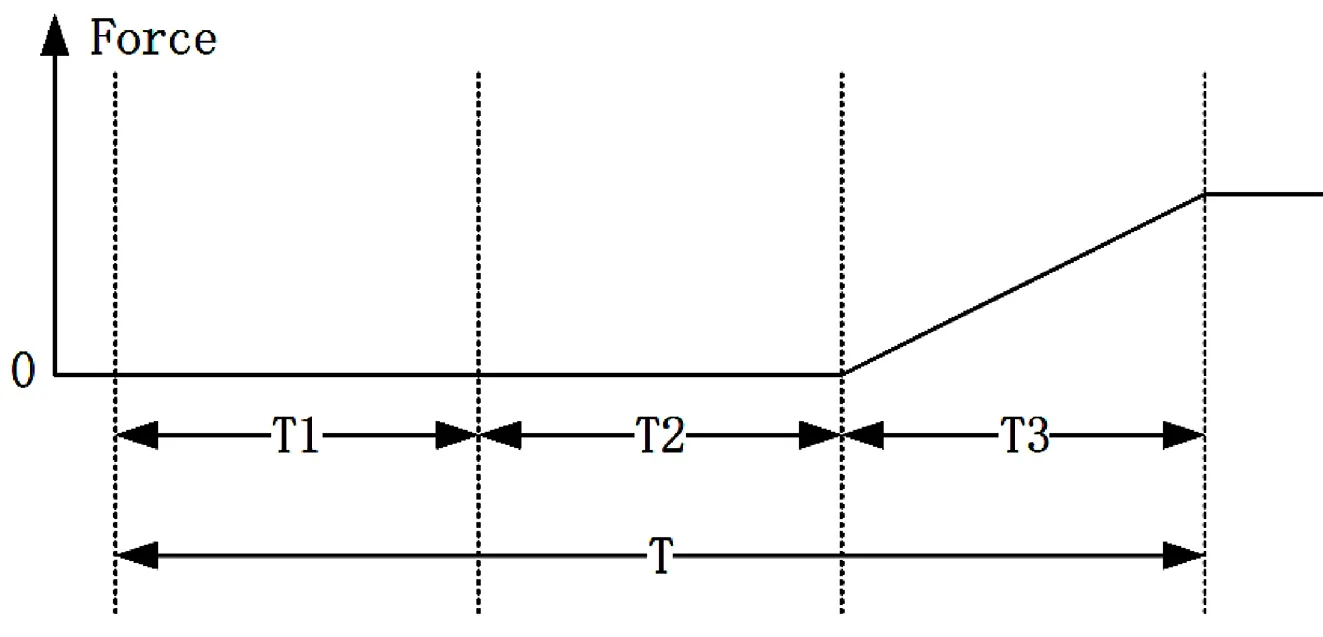
图2 ATO精准停车过程
2.1 制动力配置及管理控制策略
制动力由电制动力、液压制动力和磁轨制动力组成。七模块低地板有轨电车3个动车配置了载荷传感器,且M车载荷参数替代Tp车载荷参数,当EBCU检测到非零速信号时列车重量被储存,直到下一站为止,重量值被固定,单车2个载荷传感器取平均后对外输出重量信息T(以百分比形式)至TCMS,TCMS接受单车重量信息,并计算列车重量M列车,并将相应列车重量发送至EBCU及牵引控制单元(DCU)。列车重量M列车计算公式:
M列车=M列车AW0+(MMc1-AW3-MMc1-AW0)×TMc1+(MMc2-AW3-MMc2-AW0)×TMc2+(MM-AW3-MM-AW0)×TM+(MTp-AW3-MTp-AW0)×TM+ M列车转动惯量
(1)
TCMS根据列车重量及制动级位计算列车总制动力F总,并发送至DCU及EBCU。F总计算公式:
F总=M列车×a
(2)
其中,M列车为列车重量,a为制动级位对应的减速度。
制动力管理优先采用电制动控制策略,列车在制动过程中,EBCU通过司控器制动级位和MVB网络指令向DCU申请电制动力,DCU收到请求信号后输出实际电制动力F电,将列车速度进行预减速,当速度点达到进入电液转换条件时,开始补充液压制动力F液,当特定制动工况需要施加磁轨制动时,列车将投入磁轨制动力F磁,保证列车总制动力等于电制动力、液压制动力和磁轨制动力之和,其计算公式如下:
F总=F电+F液+F磁
(3)
根据上述制动力配置及管理控制策略,能够实现列车进行预减速,从而进入电液转换控制过程。
2.2 电液转换控制策略
列车在制动过程中,首先通过电制动力将列车进行预减速,当速度点达到进入电液转换条件时,开始实施电液转换控制策略:即当速度降到电液转换点时,DCU通过TCMS发出电制动淡出信号,经过短暂通信延时,EBCU收到电制动淡出信号,此时电制动力按比例减少,液压制动力按比例增加,直到电制动力完全退出,液压制动力完全施加。
电液转换控制策略曲线如图3所示。在t0时刻,列车发出电制动淡出信号,经过t0到t1的延时,电制动力按照固定曲线斜率减少,液压制动力按照同样的曲线斜率增加,直至t2时刻,电制动力完全退出,液压制动力完全施加。当速度来到t3时刻,列车进入VOBC控制保持制动过程,直到t4时刻,列车施加最大液压制动力,保证列车在线路最大坡道停车而不出现溜逸。
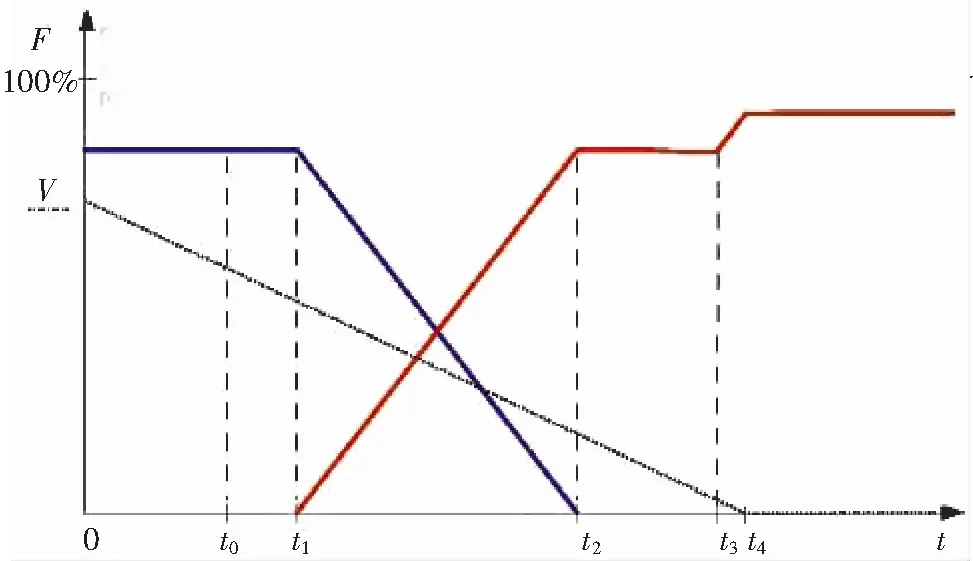
图3 电液转换控制策略曲线
2.3 VOBC控制保持制动策略
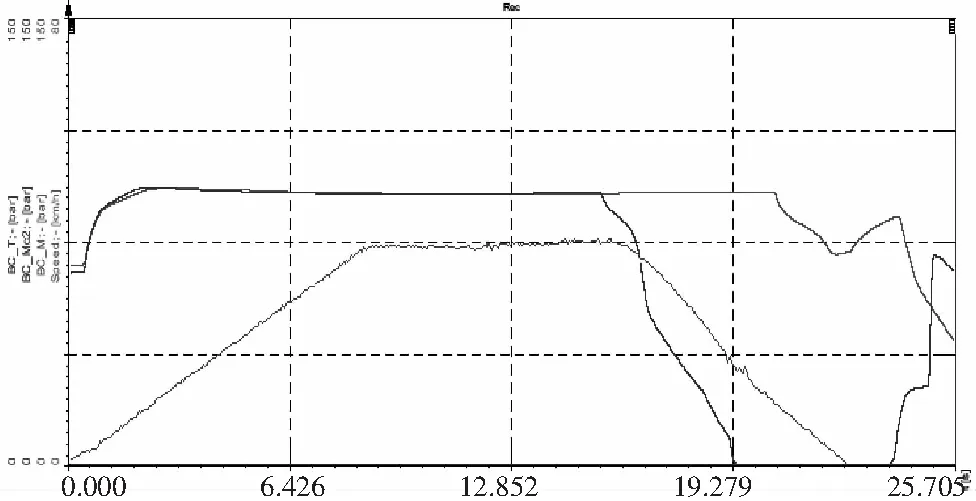
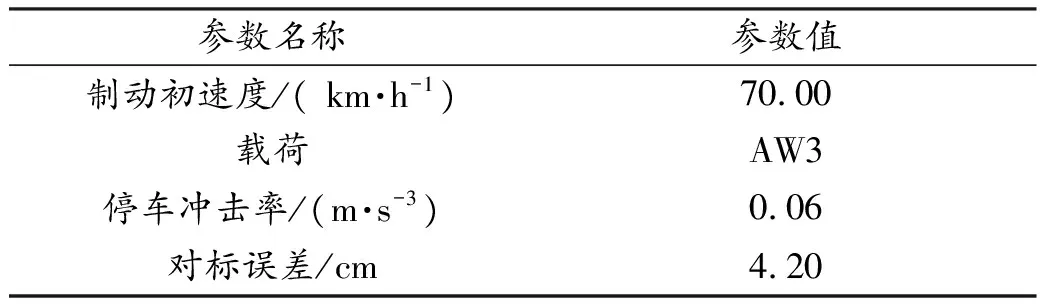
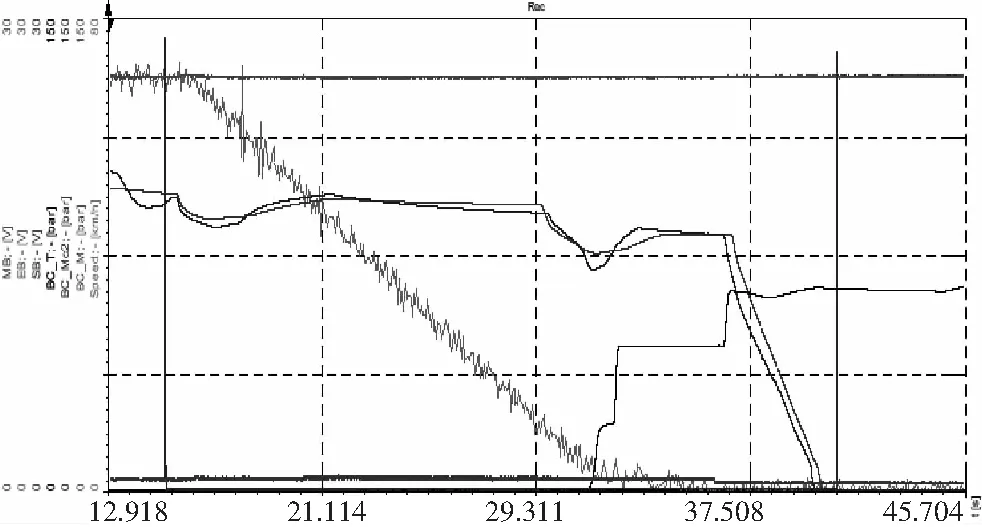
VOBC控制保持制动如图4所示。列车处于ATO运行模式时,当列车速度小于V1且持续t1 s,VOBC通过MVB网络向TCMS输出60%的常用制动和保持制动施加请求指令,此时EBCU会根据TCMS输出的施加请求指令,同时EBCU会检测列车速度,若检测到列车速度大于V2则不接受此指令,只有低于V2此命令才有效,液压制动系统才施加保持制动,同时液压制动系统撤销60%的常用制动指令。其中V1 图4 VOBC控制保持制动流程图 另外,列车在非牵引状态下,EBCU检测到列车速度小于V1且持续t2s后,仍然没有收到VOBC输出的保持制动施加请求指令,此时液压制动系统同样施加保持制动,确保在VOBC故障或MVB网络通信故障情况下仍然安全停车。 通过制动力配置及管理控制、电液转换和VOBC控制保持制动方式,不仅改善了停车冲击,而且站台屏蔽门对标误差小,极大地提高了列车运营效率,实现了ATO精准停车控制要求。 基于上述ATO精准停车控制策略,七模块低地板有轨电车在不同载荷、不同速度等级下,能够在具有站台屏蔽门运营环境中实现精准对标停车,且停车冲击性小、乘客舒适度高。针对不同载荷、不同速度等级进行了10 000次试验数据统计,平均停车冲击率为0.05 m/s3,平均对标误差为3.8 cm,现以下面2组具体试验数据进行说明。 试验1:AW0载荷,40 km/h速度等级,ATO停车数据如表1所示,停车过程如图5所示。 表1 40 km/h速度AW0载荷ATO停车数据 图5 40 km/h速度AW0载荷停车过程 试验2:AW3载荷,70 km/h速度等级,ATO停车数据如表2所示,停车过程如图6所示。 表2 70 km/h速度AW3载荷ATO停车数据 图6 70 km/h速度AW3载荷停车过程 试验结果表明:列车在不同载荷、不同速度等级下停车冲击小、对标站台屏蔽门误差小,满足ATO精准停车要求。 制动系统是确保低地板有轨电车行车安全最关键的系统,同时,利用MVB网络与TCMS及信号系统配合是实现ATO精准停车的关键所在。本文使用的七模块低地板有轨电车ATO精准停车控制策略可以为其他有轨电车ATO运行设计提供一定的参考。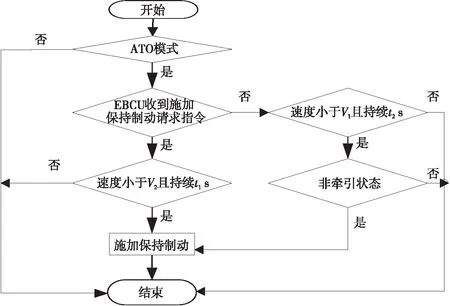
3 试验验证

4 结语
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
重型机械(2020年2期)2020-07-24
消费导刊(2018年10期)2018-08-20
凿岩机械气动工具(2017年3期)2017-11-22
山东工业技术(2016年15期)2016-12-01
凿岩机械气动工具(2016年2期)2016-11-11