
水下无人航行器用电机的集成设计
2022-06-20 05:03麻翠娟张雪峰杨晨炜李国强王智慧
微电机 2022年5期
麻翠娟,张雪峰,杨晨炜,李国强,王智慧
(1.北京精密机电控制设备研究所,北京 100076;2.北京宇航系统工程研究所,北京 100076)
0 引 言
交流永磁同步伺服系统已成为现代机电伺服驱动的发展趋势,永磁同步伺服电机是其重要执行部件,永磁同步电机具有结构简单、体积小、效率高、功率因数高等多项优点[1]。
为满足水下无人航行器对电机浸水式、体积小、集成化、噪声低、低成本、长时稳定工作的要求,本文研制了一种新型的永磁同步电机,应用电磁场有限元分析技术对电机磁路进行合理设计,充分提升电磁利用空间,减小电机转矩脉动,满足电机长时稳定运行的使用要求。同时,合理设计电机结构,解决结构紧凑、体积尽可能小的问题。采用耐腐蚀材料并严格设计密封结构,实现了电机的工作稳定性和可靠性。该电机与驱动控制器实现了集成一体化设计、装调、试验,提高了产品的集成性。
1 电机设计
1.1 设计要求
该电机作为水下某作动器的动力输出元件,要求体积小、成本低、水下可靠工作、电机通过线缆直接与驱动器实现电气连接。主要技术指标如下:
(1)直流母线电压:300±60 V;
(2)相电流有效值:≤5 A;
(3)极对数:P≤7;
(4)工况点转速、转矩要求:电机转矩3 Nm时,转速≥2000 r/min;
(5)单次工作时间:10 min;
(6)寿命:≥8年;
(7)总成尺寸:不大于200X180 mm(长X宽)
(8)单台电机总质量:2.8±0.1 kg
1.2 主要参数设计
根据如下经验公式计算定子内径和铁心长度:
(1)
式中,Dil为定子内径(m);Lef为铁心长度(m);Temmax为最大电磁转矩(Nm);Bσ为气隙磁密(T);A为电负荷(A/m)[2]。
由式(1)可见,定子内径和铁心长度主要取决于气隙磁密和电负荷。鉴于电机长时工作在海水环境中,散热条件有很大改善,电机运行时电流密度可以较常规电机适当提高,这样便可以减小电机体积,提高功率密度。
本方案充分提升电磁利用空间,实现额定输出要求,同时进行有效的电磁结构优化,保证电机在海水环境下的运行可靠性。额定转矩电流密度达11.25 A/mm2。考虑到技术指标要求极对数不大于7,为减小电机体积,提高其单位体积内的功率密度,在铁耗允许的范围内,转子选择多极结构,使得每极磁通量减小,有效地减小定子轭部的体积。电机要求动态反应快,同一功率等级的电机多极比少极每相电感更小,使得电机动态响应更快。分数槽结构可以有效减小齿槽转矩,分数槽电机工艺性好[3],因此,极槽配合方案选取绕组系数高、齿槽转矩小的14极15槽分数槽结构。
根据初步计算,电机主要结构尺寸如表1所示。
其次,改进进度管理模式能够保证建筑工程现场施工的安全。安全是现代建筑工程建设中常被提到的一个概念,因为安全问题和工程质量、经济性以及进度之间都存在着紧密的联系。若是在工程施工中出现安全事故,不仅会带来较大的经济损失,同时还会阻碍施工活动的正常推进,延误工期。基于此,在建筑工程施工的过程中,工程管理人员必须要从安全角度出发对工程进度计划进行科学的制定,保障各方面工序以及工作量的合理安排,留出一定的缓冲余地,同时改进但进度管理,将其与安全管理进行有机联动,如此才能保障建筑工程施工顺利有序的完成。

表1 电机主要结构尺寸
应总体体积小、集成化要求,将电机驱动控制器集成在电机壳体内,经初步设计,电机结构图如图1所示。电机由驱动控制器供电驱动,供电电压为300±60 V,输出转矩3 Nm时,转速≥2000 r/min,采用正弦波永磁同步电机,由定子、转子、壳体、端盖、驱动控制器等部分组成。转子通过霍尔组件来检测位置和速度信息,三个插装式霍尔传感器均布焊接在一个环形电路板上,与直接粘贴在绕组端部或安装在绕组之间的间隙中这两种方式[4-5]相比,方便更换或维修。驱动控制器包括两块驱动板、连接螺柱等,主要给电机和霍尔组件供电,并向上位机反馈转子信息,实现闭环控制。
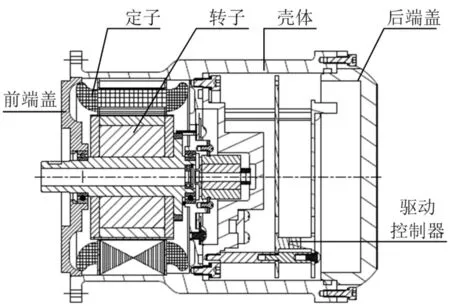
图1 电机结构示意图
1.3 电磁设计
按电机使用时实际负载和供电电压,采用基于“磁路”的电磁计算和基于电磁场有限元瞬态分析,进行电磁计算及优化分析。主要性能参数如表2所示。
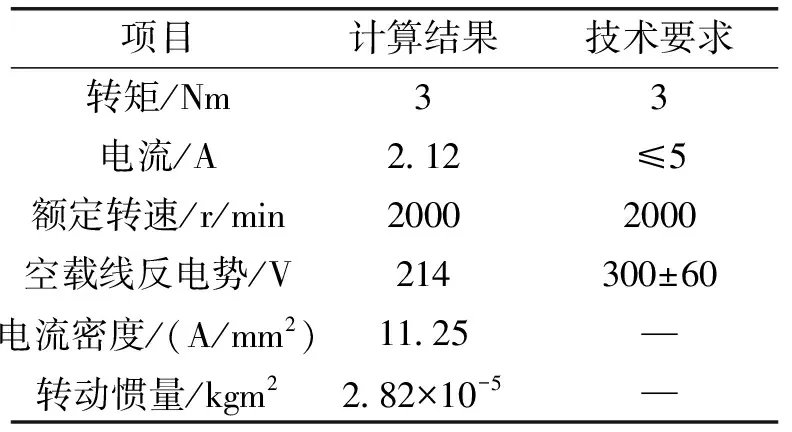
表2 电磁仿真结果
基于上述参数,电机额定转速下,利用Maxwell电磁场仿真分析软件进行瞬态有限元分析,计算结果如图2和图3所示,电磁场分布如图4所示。

图2 转矩曲线
按图2列出表3,电机“电流-力矩”对应关系数值。可看出,电机在3.5 Nm以下,基本处于线性状态,且有一定的余量。
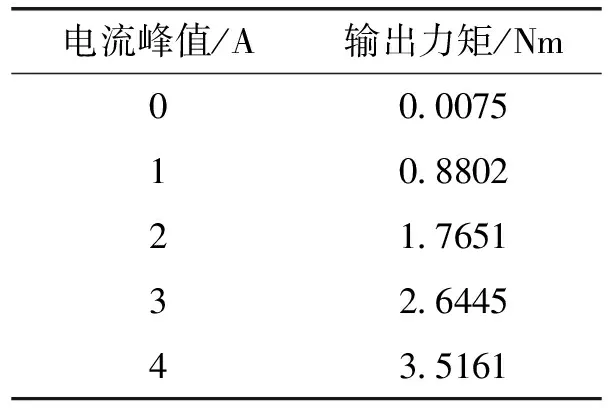
表3 电机性能计算结果

图3 反电势波形

图4 电磁场分布
从电磁场瞬态有限元分析结果可以看到,电机转速为2000 r/min时,空载反电势峰值为214 V,满足(300±60)V的使用要求。图4为电机输出3 Nm时磁密分布图,充分利用了硅钢片的性能。
仿真结果表明,设计结果正确、合理,能够满足系统要求。
1.4 海水环境下密封结构、绝缘可靠性设计
考虑电机的海水工作环境,可靠的密封结构设计至关重要。为保证水深较深情况下对外密封可靠性,采用非金属双道密封的形式。选用特瑞堡O型密封件ORAR00154,可在-20℃ ~+200℃温度范围内使用。密封结构严格按照我所加严密封标准设计,保证密封可靠,计算结果如表4所示。

表4 密封计算结果
水下电机绝缘受机、电、热、油、水和压力的作用,绝缘材料的绝缘性能及其相容性是电机绝缘设计的重要工作。匝间绝缘是这类电机绝缘的薄弱环节。聚酰亚胺漆包线耐油水性能最好,绕组选用220℃等级的聚酰亚胺漆包线(QZY(XY)BP-2/200),具有良好的导电性能,漆膜连续性及耐水性能够最大程度满足电机绝缘可靠性要求。采用H级聚酰亚胺薄膜聚芳酰胺纤维纸柔软复合材料6650作为电机定子槽、层间绝缘,聚酰亚胺薄膜用于电机相间绝缘,它们具有优异的耐热、电气绝缘、柔韧性和浸渍性能。电机绝缘耐油水性能好,耐高温能力强。选用H级660 A不饱和聚酯浸渍绝缘漆进行灌封浇注,且其与聚酰亚胺漆包线和聚酰亚胺薄膜相溶性好,提高了电机的绝缘性能。
1.5 转子位置、速度检测
为降低系统成本且保证控制性能,本文提出一种基于线性霍尔组件的电机总成系统,通过对线性霍尔组件的输出信号进行检测,实现电机启停、换向、转子位置和速度信息反馈。与输出轴安装旋转变压器外加电路方案[6]比较,电机总成硬件成本降低;与采用光电式转子传感器方案比较,亦具有成本低、性能可靠、维修方便、软件实现简单等优点。
为保证测量精度,将转子位置和速度检测磁钢与电机转子主磁钢独立开来,但两者同轴安装,如图5所示。两者充磁的极性和波形一致,且位置检测磁钢与电机转子磁钢的中心线对齐,通过检测位置磁钢的磁通密度便可得知转子的位置信息。霍尔传感器插装在独立的霍尔安装印制板上形成霍尔组件,这样不仅避免了人员装配误差导致霍尔检测精度降低的问题,而且当传感器发生故障时,整体更换印制板即可,便于维修。
为保证磁钢粘贴均匀,转子轴上均布有凸键,便于磁钢定位,可保证每个磁钢间的间隙一致,提高检测精度。
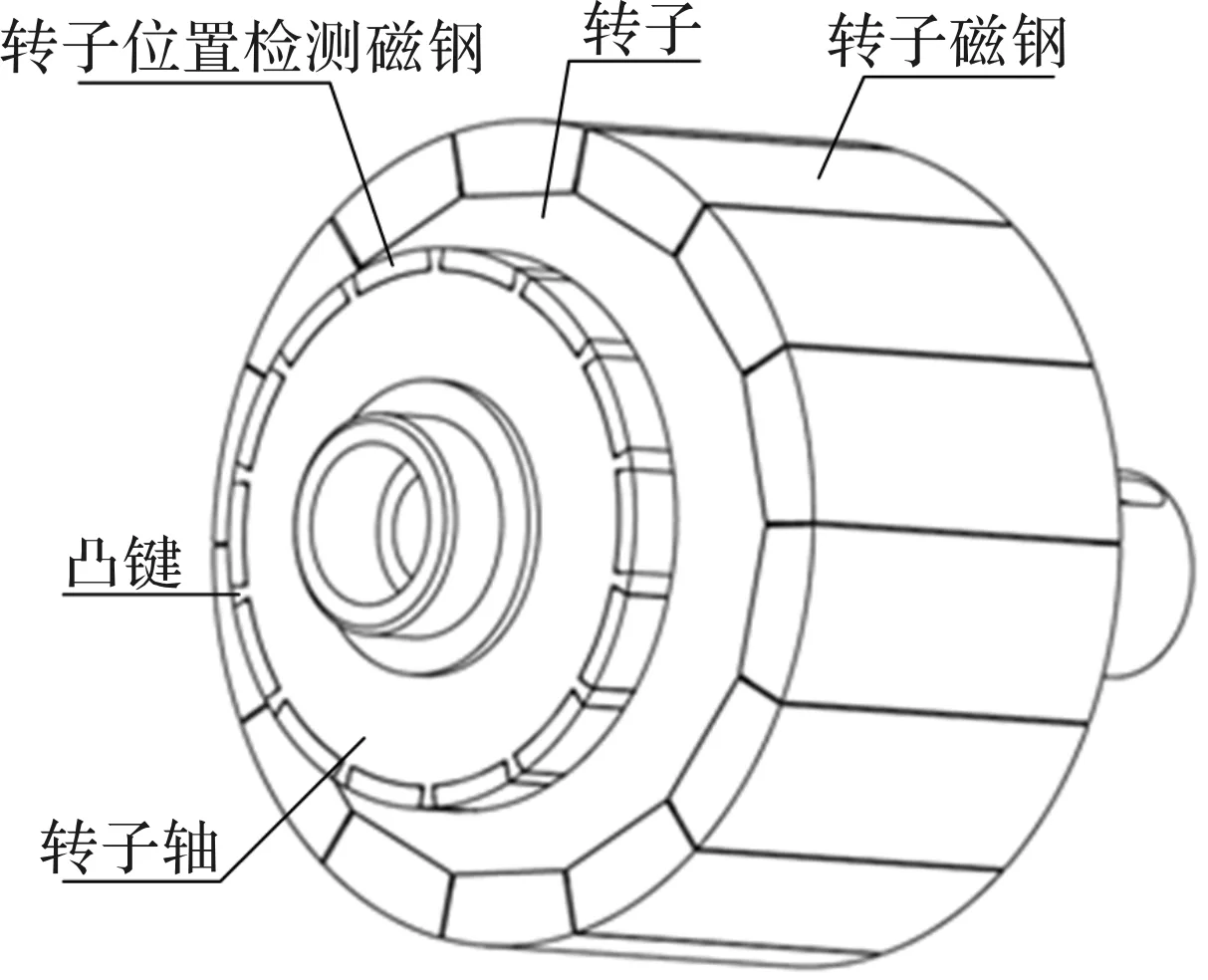
图5 电机转子磁钢和转子位置检测磁钢
2 试验情况
对实物产品进行空载和带载性能试验,带载试验装置由电源、上位机、信号发生器、电机、集成在电机中的霍尔组件和驱动控制器、电机轴工装、砝码、固定卡具组成,如图6所示。

图6 电机带载试验装置
试验时,将电机总成固定在固定卡具上,电机轴工装与电机输出轴连接,在电机轴工装上悬挂一定重量的砝码模拟电机负载转矩3 Nm,电机的位置和转速由霍尔组件测定,试验结果如表5所示。

表5 电机性能试验结果
整机关注额定电压下电机的负载性能,利用负载台,给出两个典型工况点,对给定负载下相电流有效值进行测量,结果如表6所示。

表6 额定电压负载性能试验结果
从表5和表6可以看出,试验结果与设计值相符,能够满足设计和使用要求。另外,电机随整机作动器进行了水下测试,性能参数满足要求。
3 结 论
本文设计的水下无人航行器用集成化永磁同步电机,基于总体设计要求,针对主要参数、电磁计算、密封和绝缘、转子位置和速度检测方法等四个方面进行了详细设计,综合应用电磁场分析等有限元分析技术,完成了优化设计。通过样机试验表明,电机具有功率密度大、体积小、重量轻、集成化、成本低的特点。后续此样机还随整机作动器完成了无人航行器水下试验,该集成电机具有较好的控制效果,各项性能参数均满足总体指标要求。另外,方案采用了可整体更换的独立霍尔组件作为反馈元件,降低了系统成本,提高了可靠性,具有较高的性价比,可推广用于其他水下应用场合。
猜你喜欢
阅读(科学探秘)(2022年6期)2022-06-23
防爆电机(2022年2期)2022-04-26
房地产导刊(2021年12期)2021-12-31
昆明医科大学学报(2021年12期)2021-12-30
建材发展导向(2021年20期)2021-11-20
防爆电机(2021年5期)2021-11-04
军民两用技术与产品(2021年7期)2021-10-13
青年文学家(2021年21期)2021-09-05
动漫界·幼教365(大班)(2019年10期)2019-10-28
电机与控制学报(2018年9期)2018-05-14
