
变量喷雾靶标探测技术研究现状与展望*
2022-06-20 03:10齐亚聪杨会民陈毅飞周欣马艳王学农
中国农机化学报 2022年6期
齐亚聪,杨会民,陈毅飞,周欣,马艳,王学农,
(1. 新疆农业大学机电工程学院,乌鲁木齐市,830052; 2. 新疆农业科学院农业机械化研究所,乌鲁木齐市,830091;3. 农业农村部林果棉装备科学观测实验站,乌鲁木齐市,830091)
0 引言
目前,我国病虫害主要利用化学方法进行防治,而且农业在很大程度上依赖人力来完成,在农药的使用上具有盲目性和随意性,不能根据作物的实际病虫害情况施药,导致药液的喷洒极不合理,既影响作物的品质,又造成食品安全问题[1-2]。大量的农药残留在土地和水源中,加剧了病虫的抗药性,造成了环境污染。21世纪以来,随着各种传感器技术应用于精准喷雾机械的研发,欧美等发达国家农药利用率已经提高到了50%~60%的水平,而我国喷雾技术和智能化机械与国际水平还有一定的差距。因此,开发、使用精准喷药设备对作物进行精准施药已迫在眉睫。常见的靶标探测技术主要有红外线、激光测距与扫描、超声波传感、图像等技术,国内外学者就这几种靶标探测技术展开了大量的研究[3-4]。探测的信息主要有靶标的位置、外形轮廓和体积、冠层内部结构和枝叶指数以及病虫害程度等等。
1 作物位置的探测
将药液喷洒到作物上,而不是作物的空隙间,就应该先获取作物最基本的位置信息,利用该信息可以根据靶标的有无控制喷雾开关的开合。国内外学者根据作物的不同特点,利用不同类型的探测技术来探测作物不同高度冠层的位置,常用的技术有红外线探测技术和超声波传感技术[5]。
1.1 红外线传感技术
在20世纪60年代,红外探测技术作为一种无损快速的探测技术开始被使用。邓巍等[6]对基于红外探测技术的自动对靶喷雾机作了进一步研究,选用反射率很强的特征波长850 nm,并建立了自动对靶喷雾系统。试验表明该系统可以对农林作物进行自动准确的靶标探测,探测距离在0.1~6 m范围之间,靶标最小识别距离能精确到0.3 m以下。Zou等[7]基于光电传感器研制了实时探测果园靶标位置,并利用探测的位置信息实施对靶喷雾,设计一种自动对靶喷雾器。该喷雾器采用分别安装在机器两侧的两个红外传感器对果树进行检测。该控制系统通过霍尔传感器的脉冲信号实时检测拖拉机的速度。如果检测到靶标,其位置和速度将被存储在内存中,用于计算喷雾的位置和宽度。当拖拉机行驶一定距离后,喷雾开关闭合。如果有一棵树,喷雾器就开始喷洒,如果有缝隙,喷雾器就停止喷洒。喷洒宽度可以通过设置控制参数来改变,以适应不同大小的树木。试验表明,当拖拉机以不超过1.5 m/s的低速运动,且靶标在以传感器为圆心以70 cm为半径的范围内,喷雾器能够准确检测靶标。如果检测到目标物,喷雾器将在设定的宽度内向靶标喷洒农药。
1.2 超声波传感技术
随着非接触式超声波探测技术的兴起,农业领域的作物位置探测也得到了相应的发展。早在20世纪80年代末,Giles等[8]研究指出利用超声波探测作物位置进行对靶喷雾是未来的发展趋势。可以根据实际的工作需求,在喷雾机四周安装多个超声波探测器,从而确定作物位置。5个超声波测距传感器安装在喷雾器垂直桅杆的两侧,喷雾器两侧的喷口分为5个单独控制的部分,每个部分由一个超声波传感器控制。在作业过程中,每一侧的传感器在5个高度上检测是否有树叶,并开启与检测到的树高对应的喷头。虽然间歇性控制喷雾所带来的药物节省相当可观,但系统只检测到目标作物的存在,而没有检测到目标作物的特性。此外,该系统仅适用于检测是否具有明显植物,作为一个要进行商业化应用的果园风送式喷雾器是明显不能满足作业使用的。Miranda-Fuentes等[9]基于超声波传感器设计的对靶喷雾机对橄榄树进行喷雾,在喷雾机四周不同高度安装超声波传感器,每个传感器对应一组喷头,中控机根据超声波传感器传来的不同高度冠层是否存在的信息,控制对应的喷头开关进行对靶喷雾。
1.3 视觉与激光扫描融合技术
Shalal等[10-11]考虑到一种技术的不精准,采用低成本视觉和激光扫描技术的树干检测及果园局部尺度制图方法。传感器数据的融合改进了树干检测方法,因为激光扫描仪可以提供准确的树干和物体的范围、角度和宽度,而视觉系统可以区分树干和其他物体。得到的地图由果园中单个树木和非树木物体的二维位置组成。在这项研究中,树木被用作定位的地标,连同已构建的单个树木的地图和移动机器人车载传感器(摄像机、激光扫描仪和里程计)的测量值。利用相机和激光扫描仪对移动机器人与树木之间的距离进行检测。根据GPS位置测量值对模糊位置进行评估,以GPS位置测量值与模糊位置之间的欧氏距离的均方根来确定位置精度,如图1所示。

图1 移动机器人及其传感器
1.4 小结
靶标位置探测方法与优缺点如表1所示。

表1 靶标位置探测方法及优缺点Tab. 1 Target position detection methods and advantages and disadvantages
无论是直接探测作物冠层的位置还是通过探测作物的某些特征来估算冠层的位置,传感器都应该放到喷头前面一段距离,给控制器留下足够的时间控制电磁阀的启闭。靶标和喷头的相对距离可以根据实际车速计算得到,但是如若作物的最小株距小于传感器与喷头之间的距离,还要对位置信息进行暂存。根据作物冠层的有无实施对靶喷雾,大大提高了农药的利用率,减少了环境污染,而且农药的利用率与作物间隙比例有着密切的关系,空隙比例越大农药的利用率就越高[12]。靶标位置的探测主要使用的技术有红外传感器、超声波传感器以及视觉与激光扫描技术等。
2 作物外形轮廓探测
仅探测靶标的有无只能做到准确地对靶喷雾,而不能根据靶标的具体外形特征实现按量喷雾。超声波传感器靶标探测主要是利用超声波测距原理,通过计算超声波发射器与接收器之间的时间差与超声波在介质中传播的速度乘积来实现测距。该理论可以用于测量探测器和作物之间的距离,根据二者的距离来确定作物的外形轮廓和体积。超声波传感器测量虽然鲁棒性好、价格低廉,但是较大的角度发散会影响系统的精度,所以波束角度越小越好,在作物探测领域选15°以下为宜[13]。
2.1 超声波传感技术
国内外学者基于各种传感器研发了多种作物冠层探测系统。早在20世纪80年代末,Roper[14]就在喷雾机两侧不同高度处安装多个超声波传感器,并且根据探测结果来指导喷雾机进行按量喷药。Giles等[8]基于CCD摄像机设计了探测果树树冠的系统,实验证明该系统可以精确测量果树的树冠面积,与实际相比误差控制在10%以下。Zaman等[15]研究了冠层叶片密度和平台速度对超声波系统测量树木体积性能的影响。在3次重复中,以3种平台速度从两侧扫描15棵密叶柑橘树和15棵部分去叶柑橘树。将树冠体积的超声波测量值与手工测量值进行对比分析得到,在95%置信水平下,超声波测量与手工测量的误差-17.7%~28.71%,冠层叶片密度对冠层体积的超声测量有显著影响。Escolà等[16]设计了一种基于超声波和光学传感器的苹果冠层探测系统。试验表明,在实验室条件下,超声波传感器测量距离的平均误差为±0.53 cm。然而,在实际作业环境中该系统的准确性却大幅度降低了,而且还发现当相邻传感器相距30 cm时,平均误差为±17.46 cm;当传感器间隔60 cm时,平均误差为±9.29 cm。因此,超声波传感器比较适用于安装间距大于60 cm的条件下。这一结果也适用于其他苹果品种和其他类似物种,如冠层结构和叶片尺寸相似的梨作物。但必须要考虑到的是,由于冠层表面的特性和超声波工作原理导致的误差增加,降低了系统的精度。使用单个或多个超声波传感器在苹果冠层进行对比试验,以多个超声波传感器垂直分布组成的探测阵列,通过实时记录每个超声波传感器到靶标的距离,可以得到靶标的外形轮廓,然后通过计算得出冠层体积。超声波传感器探测树冠体积的方法就是通过测量靶标与探测器之间的距离,然后通过距离来推算体积,所以,其他能进行测距的传感器也可以通过此法来计算体积[17]。
2.2 激光传感技术
激光传感器能得到比超声波传感器更高的精度,但是激光传感器如果多个传感器并用的话,无疑会增大成本,所以激光传感器测量树冠时要发展与超声波技术不同的道路,摒弃多个传感器布置的方案,采用发展单个传感器探测的方案,这方面新发展的技术有激光探测、激光搜索技术。激光传感器和激光扫描仪重构靶标三维模型的方法与超声波测距探测靶标体积的原理十分相似,但是采用激光传感器进行测距构造出来的三维模型更加接近实际的体积。李秋洁等[18]采用激光扫描仪对靶标进行探测,试验证明该系统可以探测计算出树冠中心距离和树冠体积。
Osterman等[19]利用激光雷达设计了果园树冠外形探测喷雾系统,在探测过程中获得不同高度树冠外形,并在喷雾过程中实时控制上中下3个喷雾臂的角度和位置实现仿形喷雾。激光雷达系统能够以足够的精度测量植物的几何特征,使获取作物的三维数字化图像成为可能。试验证明该系统获得的三维树木模型与真实靶标结构的一致性。对于选定的树木,人工测得的体积与三维LiDAR模型得到的体积相关系数高达0.976[20]。Polo等[21]基于雷达设计的探测系统对树冠进行探测,试验证明该系统不仅可以获得传感器和测量目标之间的距离,还可以获得靶标的3D点云数据,通过数据可以得到靶标的几何外形。
2.3 小结
靶标外形轮廓测量方法及优缺点如表2所示。
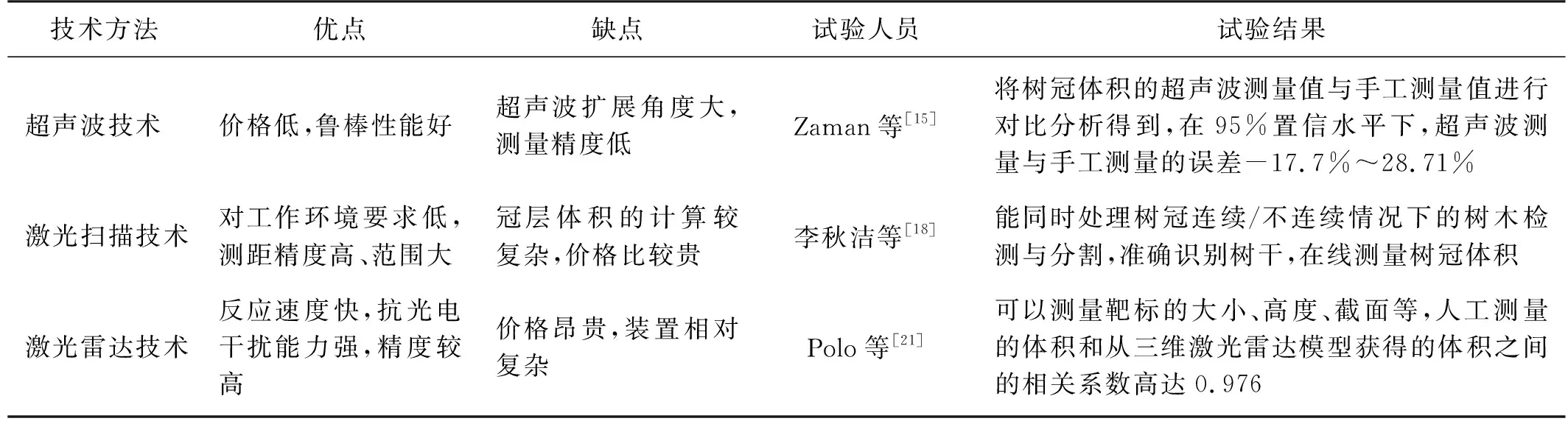
表2 靶标外形轮廓探测方法及优缺点所示Tab. 2 Target contour detection methods and advantages and disadvantages
作物外形轮廓的探测主要使用超声波传感器、激光传感器等技术。激光传感器的精度更高,采用激光雷达或激光雷达扫描仪来进行靶标探测,可以获取较为精确的靶标信息,能够准确地把靶标特征反映出来,但是激光雷达高昂的价格也限制了它在靶标探测方面的应用,在农业领域靶标探测方面还需要进一步的研究。
3 作物枝叶密度探测
随着研究的推进,发现如果仅仅考虑作物的外形体积不能做到全面按需喷药,作物枝叶密度是影响作物施药量的重要指标之一。在作物体积和病虫害程度等因素相同的情况下,作物枝叶密度越大,需要的药量也就越大。因此国内外学者对作物密度开始研究,枝叶稠密的评估指标也被提出。
3.1 激光传感技术
Sanz-Cortiella等[22]基于二维雷达传感器左右两侧扫描果园冠层,获得了果树三维结构图,经过试验得出果树冠层的激光点云信息,并使用统计方法得出果树冠层的激光点云数量和叶面积之间呈线性关系。Palacín等[23]基于激光扫描技术设计了树叶表面积估算系统,试验获得树木外轮廓与树叶表面积之间的线性关系方程,且平均误差在6%以下。该方法的简单性在于可以实时控制喷药剂量,并在完整树丛的叶片估计中具有可接受的平均误差,相比于其他研究这是一个改进。Llop等[24]使用激光雷达对西红柿冠层枝叶稠密度进行探测,获得了冠层体积与叶面积指数之间的线性关系。激光雷达传感器从两侧扫描植物,得到了冠层高度、冠层宽度、冠层体积和叶面积。在此基础上计算树行体积、叶壁面积、叶面积指数、叶面积密度等重要参数。与激光雷达传感器相比,人工测量会高估参数。用扫描仪估算的冠层体积对估算冠层高度、体积和密度是相对可靠的。
3.2 图像处理技术
针对激光探测器价格昂贵的问题,一些学者将图像处理技术作为靶标探测的另一个研究方向。在2006年张富贵等[25]利用相机拍摄靶标的静态照片,然后将照片进行处理获得靶标枝叶的疏密情况。并在此研究的基础上将树叶疏密程度数据与超声波传感器测量的距离通过3层BP神经网络进行数据融合训练,消除成像距离对树叶疏密程度的影响,数据融合值可以用于系统的喷雾控制,树叶的稠密度决定着喷雾量。利用图像处理技术虽然能够较好地探测到靶标冠层的特征信息,但是图像处理对外界环境光线的要求较高,图像的处理速度慢也限制了喷雾机的在线决策。
3.3 超声波传感技术
超声波探测方法本质上是波谱方法,超声波传感器发出超声波之后遇到障碍物会被反射回来,反射的波强度会随靶标的形状大小的变化而变化。根据这一特性,Palleja等[26]做了一个假设,超声回波和枝叶密度存在正相关关系,作物枝叶密度越大,产生的回波越强,如图2所示。根据这一假设通过针对苹果园的1个完整生长季节的观测试验。试验证明,超声波回波的强度的确和冠层密度存在正相关关系,该结果虽然没有建立冠层密度和超声波强度直接的数学模型,但是仍然可以证明超声波回波指导喷雾在理论上是可行的。

图2 基于超声波传感器冠层稠密程度探测
3.4 小结
冠层内部结构探测方法及优缺点如表3所示。
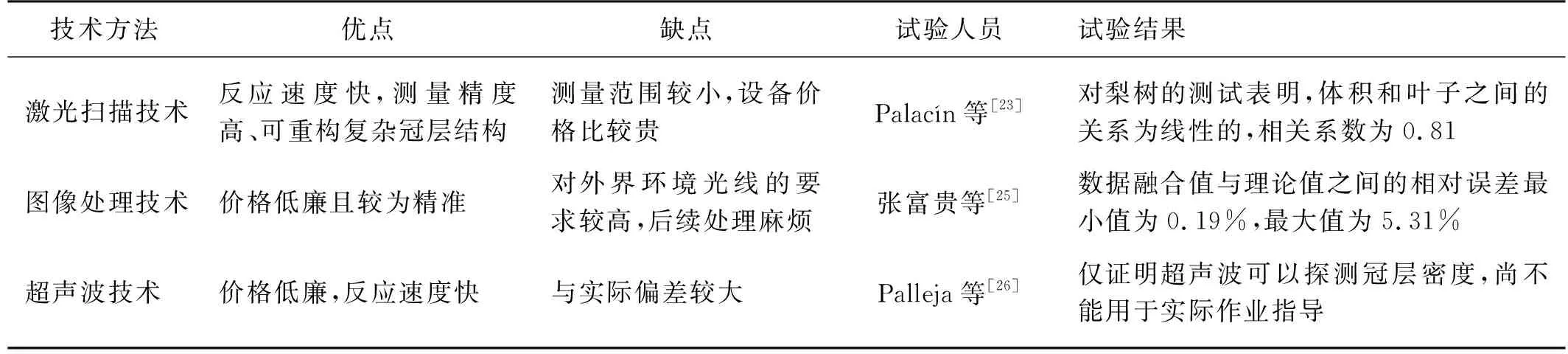
表3 靶标枝叶密度探测方法及优缺点Tab. 3 Detection methods of target branches and leaves density and their advantages and disadvantages
对于作物冠层内部结构的探测主要有红外光谱技术、激光扫描技术、图像处理技术以及超声波传感器等。其中红外光谱技术只能用于估计冠层叶片的大概密度,而利用激光技术可以更加具体地测量作物内部结构。图像处理较为复杂,对软件要求较高,超声波传感器的试验只能证明冠层密度与超声波的强度存在相关关系,现阶段并不能直接用于指导喷雾。
4 作物病虫害的探测
对于病虫害的探测,最早是从遥感技术开始研究的,而最早的农业遥感技术获取的病虫害信息主要用于大规模的管理和宏观的决策,并不适用于田间或者温室的实时变量喷雾。近年来,田间精细化喷雾的需求推动了田间病虫害探测技术的发展。作物病虫害识别是根据作物发生病害时其颜色、形状、纹理等外观会发生变化,通过对图像各个颜色的空间特征和作物特征的提取、处理来分辨病虫害的程度、种类等[27]。
病虫害程度的获取是基于病虫害精确喷雾的核心,病虫害的获取有直接获取法和间接获取法两种,其中直接法主要基于分子技术在实验室检测病虫害程度,虽然准确性高,但是检查过程比较复杂,对仪器设备的要求较高,费用昂贵,应用于实际作业的自动化检测难度较大[28-30]。间接法有基于光谱和图像技术对作物外形特征变化的探测,以及基于气体传感器对病虫害挥发性有机化合物变化的探测[31]。
4.1 光谱与图像处理技术
冯洁等[32]基于多光谱和神经网络技术设计的黄瓜病虫害识别系统,通过对抓取的黄瓜图像进行灰度处理建立病虫害识别模型,试验表明该系统对红粉、黑星和白粉病的识别,准确率高达96.67%、93.3%和100%,这种方法可以快速提取植物病虫害类型,为实现作物的快速、无损诊断提供了技术支持。柴阿丽[33]利用番茄颜色、形状、纹理等特征建立了番茄病虫害识别模型。针对番茄病虫害症状复杂、检测效率低等问题,使用计算机视觉、高光谱成像和光谱分析等技术对番茄主要病虫害进行综合无损检测,试验证明准确率可达到94%。
秦淑芳[34]基于空间色彩构建空间模型的方法去检测甘蓝型油菜叶片病虫害,再对图像进行二值化和去噪处理,最后提取叶片的纹理特征等参数,经过特征的对比来确定病虫害的程度。但是该方法在采集叶片特征时没有采集足够多的叶片图像,只采集了一次,并没有跟踪甘蓝型油菜的生长过程,不能建立完整的检测模型,而且不同叶片间的病虫害也不尽相同,所以该方法的应用有一定局限性。李震等[35]基于可见光图像设计了一种柑橘实蝇成虫检测系统,该系统适用于机器自动识别的实蝇分类,可以识别柑橘小实蝇、南瓜实蝇和瓜实蝇等成虫,整体准确率高达95.56%。该系统可以实现对较低分辨率的图片进行处理,对图像质量要求低,适合设备的动态识别,为机器视觉识别实蝇类昆虫的实时检测提供了技术依据。Tian等[36]通过获取小麦的颜色、纹理和形状特征对小麦的白粉病、小麦锈病、叶枯病进行检测,然后将小麦的主要特征作为相应分类器的训练集,并采用多分类器系统提高了分类精度。
4.2 电子鼻探测技术
挥发性有机化合物是大气层的组成部分,但是树木和作物释放出来的该气体占大气中该气体含量的三分之二。病虫害的影响会导致树木或作物释放该挥发性有机物的量发生变化,根据此原理,可以通过探测该挥发性气体的变化来探测作物的病虫害信息。电子鼻就是基于气体传感器制成的探测挥发性气体变化的装置,可以探测病虫害程度。电子鼻主要由气体传感器阵列、信号的预处理和分析识别三部分组成,当气体传感器阵列探测到某种气体时,传感器会将化学信号转化为电信号,然后对该信号进行降噪、提取、放大等预处理后,最后采用合适的模式识别方法对其进行分析得出最终探测结果[37]。Li等[38]研制的基于导电聚合物传感器的电子鼻成功地应用于蓝莓病害的检测和鉴别。这种基于嗅觉的无损检测方法在蓝莓质量控制和真菌疾病检测方面有很大的前景。
4.3 小结
作物病虫害探测方法及优缺点如表4所示。
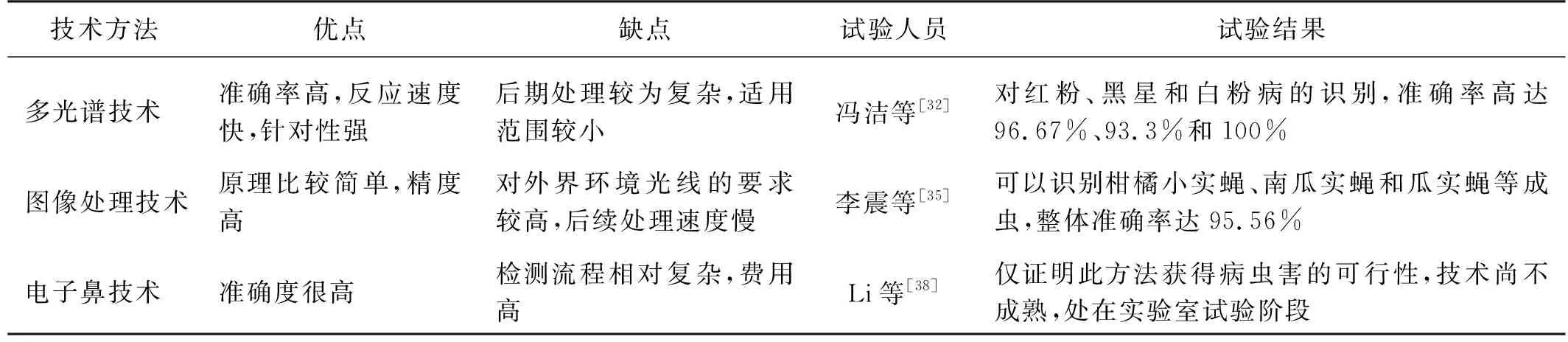
表4 作物病虫害探测方法及优缺点Tab. 4 Detection methods of crop diseases and insect pests and their advantages and disadvantages
在病虫害探测技术方面,图像处理技术起步较早,技术较成熟,红外光谱也逐渐应用于实际工作中去。但是部分研究仅仅预示检测病虫害的可能性与实际需求相差较远,需要进一步研究。
5 存在问题
5.1 技术难点
靶标作物冠层枝叶稠密程度和冠层内部结构的探测是变量喷雾过程中的难点。虽然超声波回波强度和枝叶稠密度存在相关关系,然而是否可以实现在线指导喷药量,还需要深入的研究;病虫害程度识别技术的发展一直处于实验室静态测量阶段,尚未成功探索出非接触快速探测的方法,使得病虫害探测技术在线指导自动变量喷雾设备成为一个暂时的技术难点;虽然图像识别技术的研究取得了一定的成果,但是只能在作物外观发生明显病变时才能取得较好的探测结果,不能在作物已经患病但还没有外部表征的时候进行检测。
5.2 技术融合
虽然探测技术已经得到了较好的发展,而探测技术仅仅是精准喷雾的一部分,探测阶段完成后要将探测结果传送至喷雾执行部分,但探测部分和执行喷雾部分仍没有进行深度融合,导致自动变量喷雾机的喷雾精度受到影响。现有大多探测方法都还处在实验室建立探测模型的阶段,探测阶段与执行阶段没有进行深度融合对接。
6 展望
通过分析变量喷雾靶标探测的研究现状,可以得到精准变量喷雾就是通过获取作物的位置、形状体积、冠层内部结构和病虫害程度等信息,然后对作物进行按需按量喷雾。作物位置信息和形状体积等信息的探测技术有较大突破,装备也趋于成熟。作物冠层信息的获取以及对枝叶稠密程度的判断是当前喷药技术面临的主要问题,需要进一步研究。
任何一种探测技术都有其优缺点,若要获得高精度的作物结构信息,提高系统的可靠性和稳定性,需要将两种或多种技术方法进行融合使其优缺点进行互补。亦或是探寻可以作为指导喷雾且可感知作物物理信息的新型快速探测技术。
对于作物靶标的探测需要软件与硬件的配合,软件的发展尤为重要。要做到靶标信息的在线处理,需要加强软件的处理数据能力,可以通过提高识别设备的硬件水平、优化算法以及软件硬件的融合发展等方法进行。作物病虫害信息的探测、计算模型的普适性以及系统的稳定性都是将来研究的重点。
猜你喜欢
今日农业(2022年4期)2022-11-16
中国典型病例大全(2022年7期)2022-04-22
好日子(2021年8期)2021-11-04
故事作文·高年级(2021年5期)2021-06-01
师道·教研(2019年7期)2019-08-13
小天使·六年级语数英综合(2018年10期)2018-10-15
伴侣(2017年7期)2017-07-11
军事文摘·科学少年(2016年7期)2016-09-20
小学科学(2015年5期)2015-06-08
中国中医药图书情报(2014年3期)2014-12-11
