
Dynamic Response Analysis of a New Semi-submersible Offshore Wind Turbine Based on Aerodynamic-Hydrodynamic Coupling
2022-06-18 07:40-,-,-
船舶力学 2022年6期
-,-,-
(1.College of Marine Engineering Equipment,Zhejiang Ocean University,Zhoushan 316022,China;2.Ocean University of China,Qingdao 266100,China)
Abstract:With the NREL offshore 5 MW baseline wind turbine taken as a model,a new type of foun⁃dation for offshore wind turbines (OWTs) is designed conceptually, and the hydrodynamic coefficients and amplitude-frequency response characteristics of the foundation are analyzed. In addition, this pa⁃per proposes a new simulation analysis method by using the SESAM-FAST-ORCAFLEX software,and a fully coupled analysis model of turbine-foundation-mooring system is established. In consider⁃ation of the second-order wave force and viscous damping, the coupled aerodynamic-hydrodynamic analysis in time domain is carried out for the six degree of freedom responses. The effects of the inci⁃dent angle of wind and wave on motion response and mooring force are also emphatically studied. The results show that the new semi-submersible OWTs has excellent motion characteristics, especially in the directions of sway, heave, roll and pitch. The incident angle has a significant effect on the motion response and mooring force of the OWTs, in particular, the dynamic responses of surge, sway, roll and yaw are greatly affected. In general, the mooring force increases with the increase of the incident an⁃gle. Under the extreme condition, the maximum mooring force is 2.5 times as much as that under the operation conditions,which requires great attention in design.
Key words:offshore wind turbine;semi-submersible foundation;second-order wave force;coupled aerodynamic-hydrodynamic analysis;dynamic response;mooring force
0 Introduction
In recent years, with the global warming increasing, renewable energy including offshore wind energy has been developed rapidly. In June 2020, the Ocean Renewable Energy Action Alliance(OREAC) announced the vision of global offshore wind power reaching 1,400 GW by 2050, which will reduce more than 3 billion tons of CO2emissions each year.The development of offshore wind farms often conflicts with the use of sea for port construction, fishery and shipping. Therefore, the renewable energy community has gradually turned its attention to the deeper waters. Meanwhile,some studies have shown that when the water depth is greater than 50 m, the economy of floating foundations will be greatly improved[1],among them,semi-submersible foundation for OWTs has be⁃come the research focus because of its good stability,strong mobility and adaptability to larger MW wind turbines.
At present, most of the research on semi-submersible foundation for OWTs stays in the con⁃ceptual design or prototype test stage, no definite statement can yet be made about which type of foundation is likely the best.In June 2020,the world’s first semi-submersible offshore wind farm-Windfloat Atlantic 8.4 MW wind turbines unit was installed,marking the transition from concept to commercial use of the semi-submersible foundation.Recently, scholars at home and abroad have carried out research on the foundation type, motion performances and simulation method of OWTs.Designing a cost effective foundation is one of the most important issues to take into account, and some efforts are in progress toward this direction:Bulderet al[2]studied the RAO characteristics of a three-column floating foundation in frequency domain. Tang et al[3]designed a new type of semisubmersible foundation, and analyzed the stability, dynamic motion response and mooring force of the foundation,the results show that viscous damping has a significant influence on the dynamic re⁃sponse.The influence of wave incident angle on the dynamic response of a new foundation was stud⁃ied[4], the results prove that the incident angle of wave has a greater impact on pitch and sway re⁃sponse. A new type of floating foundation was designed[5], and the coupled aerodynamic-hydrody⁃namic analysis in time domain was carried out, it is found that the second-order wave force has an obvious effect on the motion response and mooring force. However, the natural period of heave still remains within the wave energy concentration area.The key to structural innovation and motion per⁃formance research is to overcome the problem of poor heave performance of semi-submersible structures,but this problem has not been well solved.
In the aspect of simulation method, the global performance of the 5 MW OC4 semi-submers⁃ible OWTs in random waves with or without steady/dynamic winds is numerically simulated by us⁃ing the turbine-foundation-mooring fully coupled dynamic analysis program FAST-CHARM3D in the time domain[6]. A fully coupled simulation method is proposed, which overcomes the limitations of the frequency domain and time domain analysis methods[7]. Chen et al[8]simulated OC4-DeepC⁃wind system by FAST software,and analyzed the main factors affecting the yaw motion.Zhang et al[9]used SESAM software to study the motion response and mooring force of semi-submersible OWTs under the combined effect of wave and current, but did not consider the influence of wind load in that study. Wang et al[10]established the turbine-foundation-mooring coupling dynamic model by using FAST software, and carried out the time domain analysis without considering the second-or⁃der wave force,the results show that heave motion is mainly caused by waves,surge motion is main⁃ly caused by wind loads, and wind and wave loads have an important impact on pitch motion.With the OC3-Hywind system taken as a model,the motion response and mooring force were calculated by using FAST software under different sea conditions[11], but the second-order wave force was not considered in the research. SESAM software was used to calculate the dynamic response and moor⁃ing force under the combined effect of wind and waves,however,viscous damping was ignored[12].
OWTs are subjected to varied environmental loads,therefore,the motion response and mooring⁃force are quite complex,viscous damping and second-order wave force are often ignored in the cur⁃rent study. At the same time, the existing commercial software has shortcomings in aerodynamic and hydrodynamic coupling simulation. Aiming at the key problem of poor heave performance of semi-submersible OWTs,this work designs an innovative type of foundation conceptually and pres⁃ents its hydrodynamic performance analyses in frequency domain.Combining the advantages of dif⁃ferent commercial software, a fully coupled analysis model of the turbine-foundation-mooring sys⁃tem is established. Moreover, considering the effects of viscous damping and second-order wave forces,the dynamic response and mooring force of the OWTs under the combined effect of wind and wave are simulated and calculated in time domain, and the influence of the incident angle of wind and waves on the motion performance and mooring force is also discussed.
1 Description of the new semi-submersible OWTs
1.1 Structural design
Nowadays, the foundation for the semi-submersible OWTs in operation or in the test phase generally adopts a three-column structure,and the upper wind turbine is installed on one of the col⁃umns.This type of structure is asymmetrical,with a high center of gravity and a low center of buoy⁃ancy. The overall stability of the wind turbine system is poor, which also has a negative impact on the power generation efficiency. In order to improve the stability and hydrodynamic performance of OWTs, a bottom ballast tank and three buoyancy tanks are installed to reduce the center of gravity and to increase the center of buoyancy and additional damping.
The specific design is as follows: (1) A circular ballast tank with a radius of 30 m is designed at the bottom of the foundation, and three columns are set at the edge of the ballast tank, arranged in an equilateral triangle; (2) Several through holes are set at the edge to keep the structural heave motion damping in a reasonable range; (3) The central column is set in the center of ballast tank and connected with three columns through surface buoyancy tanks. The schematic diagram of foun⁃dation and overall structure is shown in Fig.1.

Fig.1 Schematic diagram of new semi-submersible foundation(left)and the overall structure(right)
1.2 Structural parameters
The operating water depth of the semi-submersible OWTs presented in this paper is 200 m,and the wind turbine parameters adopt the 5MW wind turbine data published by NREL. The main structural properties and parameters are summarized in Tab.1.
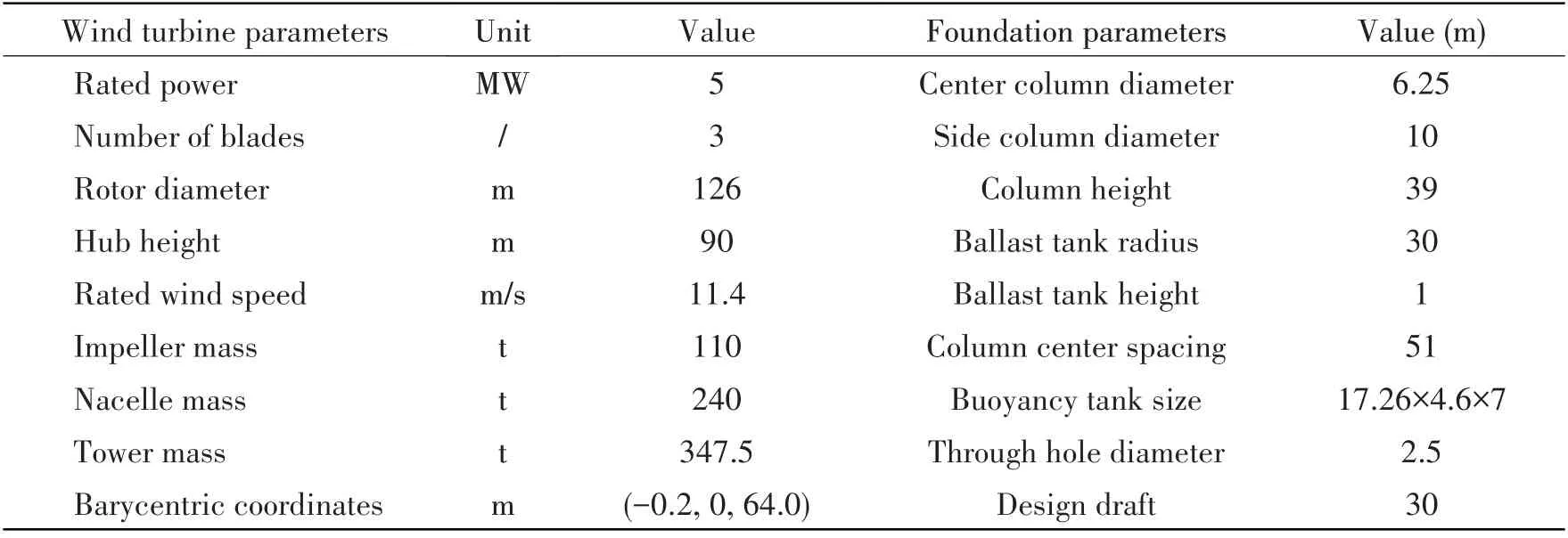
Tab.1 Main structural properties and parameters of wind turbine and foundation
1.3 Mooring system parameters
The mooring system is composed of 9 catenary lines divided into 3 groups.Each group is 120°from another and the lines in each group are spread in 10°azimuth, the arrangement of mooring lines is shown in Fig.2,and the mooring line property is tabulated in Tab.2.

Fig.2 Schematic diagram of mooring line arrangement and incident angles
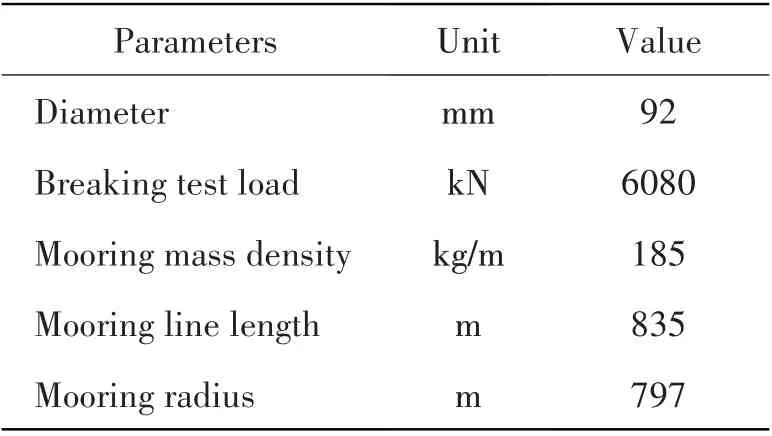
Tab.2 Main property of mooring line
1.4 Numerical analysis model
In the GeniE module of SESAM,the panel model and the integral structure finite element mod⁃el required for hydrodynamic analysis and dynamic response analysis are established, as shown in Fig.3.
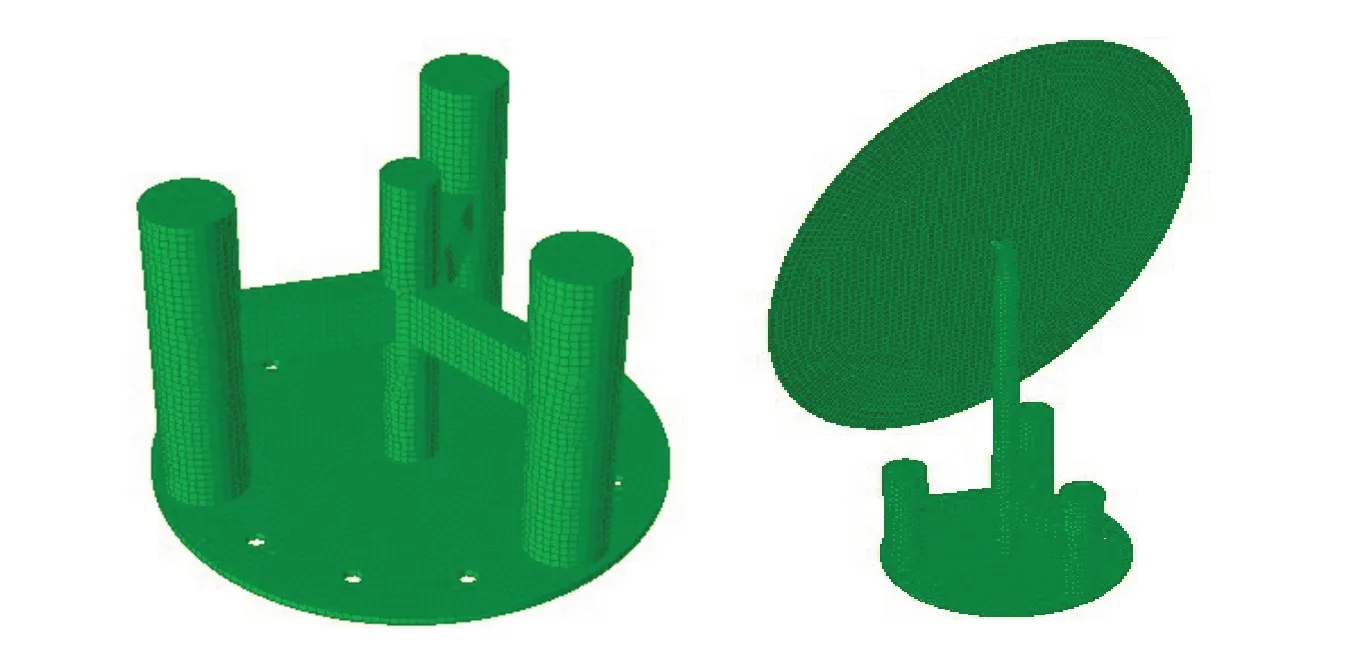
Fig.3 Panel model and integral structure finite element model
2 Calculation theory and method
2.1 Wind load
(1)Blade wind load
The load on the wind turbine blade is calculated by using the blade element momentum theo⁃ry,greater detail is provided in Ref.[4],the axial force and moment can be expressed as
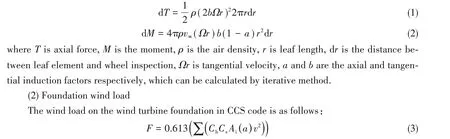
whereChis structural height factor,Csis the structural shape factor,Ai( )ais projected area, andvis the relative wind speed.(3)Wind tilt moment The CCS code stipulates the calculation of wind tilt moment as follows:

whereFiis the wind load on wind-bearing component, andZiis the vertical distance from the cen⁃ter of wind-bearing area to the center of underwater lateral resistance.
2.2 Wave load
In this paper,four different conditions of combined distribution of wind and wave are analyzed.The wave load is calculated by the time history generated by ORCAFLEX based on JONSWAP spectrum,the wave spectrum of the operation conditions and extreme condition are shown in Fig.4.
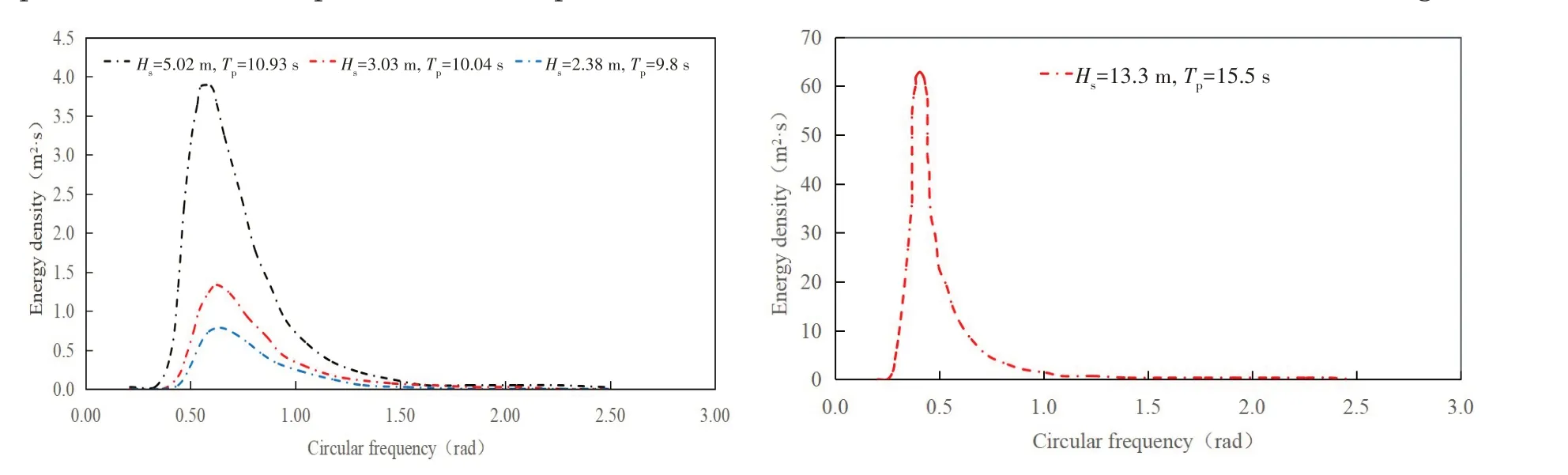
Fig.4 JONSWAP spectrum of the operation conditions and extreme condition
2.3 Motion equation in time domain
For a moored semi-submersible OWTs, the time domain motion equation (see Mao et al[13]for details)can be expressed as
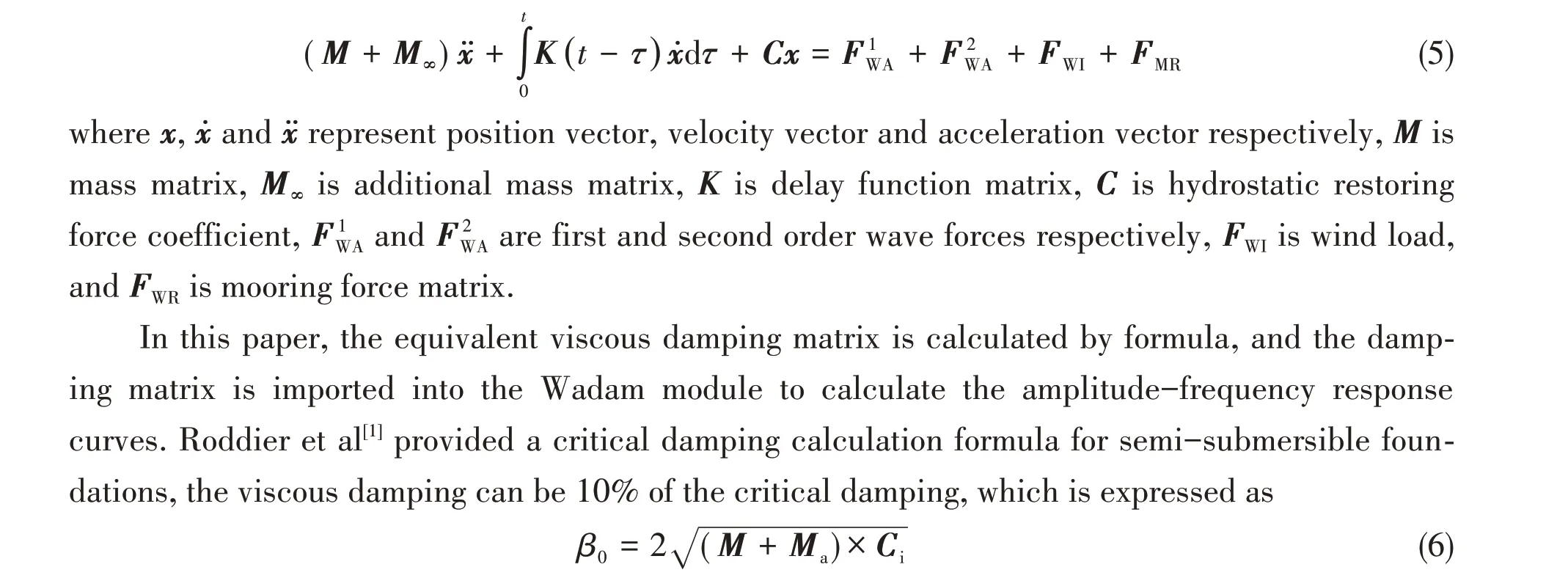
whereMis the structural mass or structural moment of inertia,Mais the additional mass, andCiis the hydrostatic restoring force stiffness.
2.4 Numerical simulation method
The numerical simulation process is as follows: firstly, the hydrodynamic and structural dy⁃namic analysis models are established by using SESAM software, and the hydrodynamic coeffi⁃cients are calculated;secondly,the hydrodynamic coefficients are imported into ORCAFLEX moor⁃ing analysis module, at the same time, the aerodynamic load is calculated by using the AeroDyn module in FAST; finally,through the external program interface provided by ORCAFLEX software,the aerodynamic-hydrodynamic fully coupled calculation is realized,as seen in Fig.5.
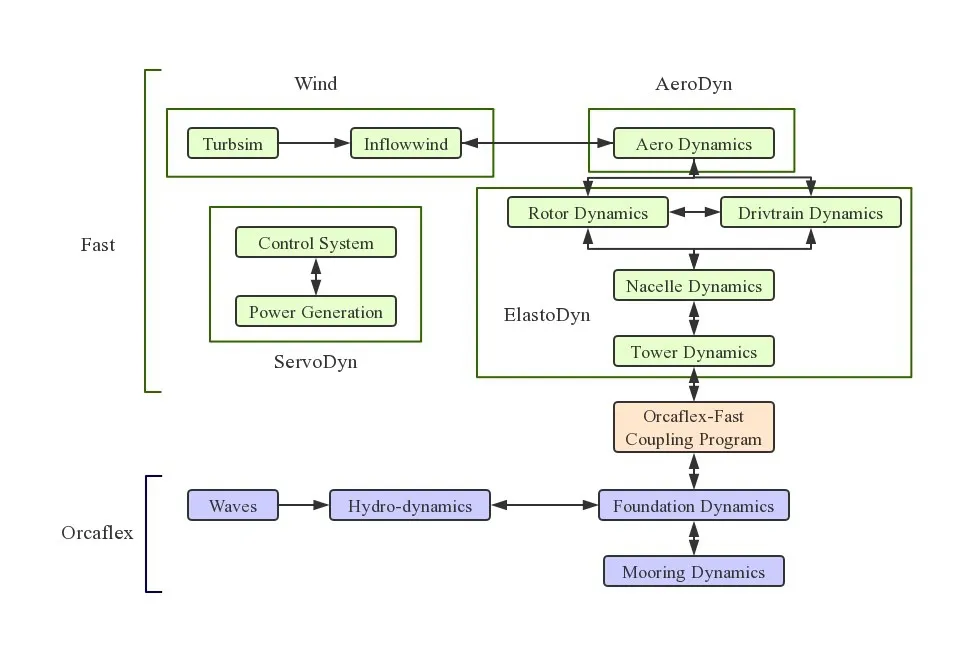
Fig.5 Process of aerodynamic-hydrodynamic coupling analysis
3 Results and discussion
3.1 Free decay test
Free decay tests are conducted to estimate natural periods of the new foundation for OWTs.The natural period of six degrees of freedom motions is listed and compared with the existing types, as shown in Tab.3. The motions of the foundation are described using three translational motions (in⁃cluding surge,sway and heave)and three rotational motions(including roll,pitch and yaw).

Tab.3 Natural periods of three different foundations
The wave energy concentration period area of the designed sea state is 4-20 s. From Tab.3, it can be seen that the natural period of the designed new foundation is far away from wave energy concentration period area,better than other types,especially in heave performance.
3.2 Viscous damping
Tab.4 shows the calculated viscous damping and potential flow damping of heave, roll and pitch.The viscous damping of heave,roll and pitch are all in the same order of magnitude as the cor⁃responding potential flow damping,indicating that the effect of viscous damping cannot be ignored.

Tab.4 Viscous damping and potential flow damping of the semi-submersible foundation
3.3 Wave force and motion RAOs
A hydrodynamic model is established in the Wadam module of SESAM software,and the effect of viscous damping is considered in the calculation. The first-order wave force transfer function,second-order wave force transfer function and the RAOs of six degrees of freedom motions are ob⁃tained by choosing the wave period from 3 s to 42 s and taking 1 s as the time interval,as shown in Figs.6-8.
3.3.1 First-order wave force transfer function
Fig.6 presents the calculation results of the first-order wave force transfer function under dif⁃ferent wave incident angles,the incident angles vary between 0°and 180°,and the interval is 30°.

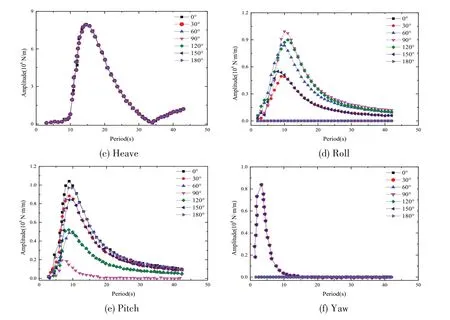
Fig.6 Transfer function of first-order wave force/moment
It can be seen from Fig.6 that the wave forces and moments increase first and then decrease with the increase of wave period generally in most instances.Among them, first-order surging force reaches the maximum value of 5.1×106N/m when the incident angles is 0° and the period is 9 s.The maximum first-order swaying force is 2.4×106N/m when the incident angles is 30°and the pe⁃riod is 12 s.As the wave period increases, first-order heaving force first increases, then decreases and then slowly increases, with a maximum value of 8.3×106N/m. When the incident angle is 90°and the wave period is 9 s, the maximum first-order rolling moment can reach 9.89×107N·m/m.When the wave period is 9 s and the incident angles is 0°and 180°,the maximum first-order pitch⁃ing moment can reach 1.04×108N·m/m.When the wave direction is 30°,90°and 150°and the peri⁃od is 6 s,the maximum first-order yawing moment can reach 8.34×107N·m/m.
To sum up, the incident angle and period of wave are not consistent when the first-order wave force/moment reaches the maximum value of six degrees of freedom,but the maximum values of the first-order surging, swaying and heaving force are in the same order of magnitude, and the maxi⁃mum values of the first-order pitching, rolling and yawing moment are also in the same order of magnitude under different incident angles.In addition, it can be concluded that the incident angle has little effect on the peak period of the first-order wave force and moment, but has a greater im⁃pact on the peak values of first-order wave force/moment of surge,sway,pitch and roll.
3.3.2 Second-order wave force transfer function
In this paper, the second-order average wave forces with six degrees of freedom are obtained by the near-field integration method for the first-order wave forces,as shown in Fig.7.
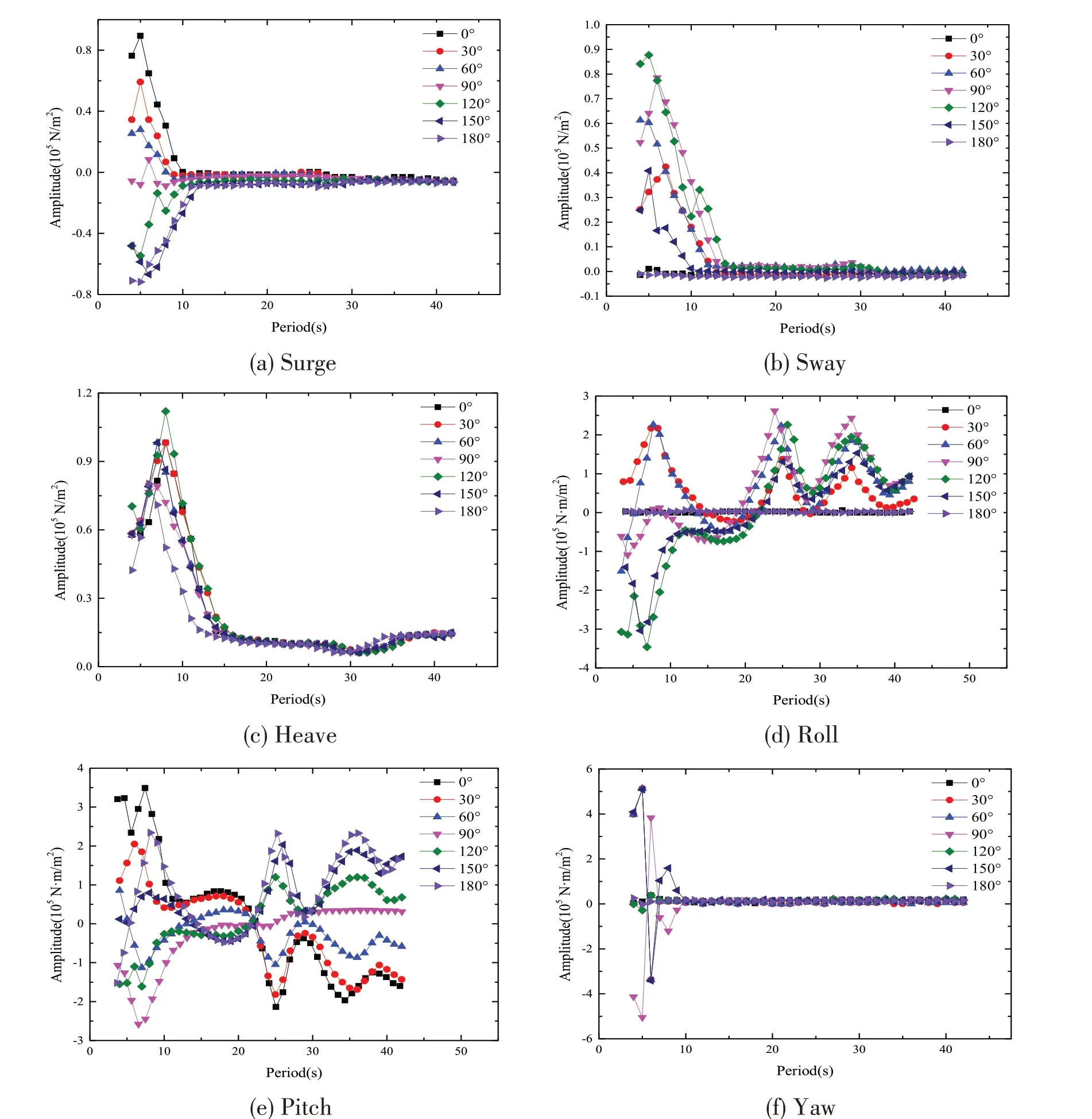
Fig.7 Transfer function of second-order wave force/moment
It is seen from Fig.7 that incident angles have little effect on the second-order heaving force,while they have an obvious effect on the second-order wave force/moment of other five directions.The second-order wave force or wave moment reaches the maximum within 5-10 s of wave period,which is located in the wave energy concentration period area and easy to cause resonance. As a consequence, although the second-order wave force is less than the first-order wave force numeri⁃cally,its influence on the motion response and mooring force should not be ignored.
3.3.3 RAOs of six degrees of freedom motions
According to the hydrodynamic calculation, the RAOs of six degrees of freedom motions are obtained,as shown in Fig.8.

Fig.8 RAOs of 6-DOF motion
From Fig.8,it seems that in the heave direction,the motion curves under different incident an⁃gles are basically coincident,indicating that the incident angle has little effect on the heave motion.The amplitude of the heave motion has a secondary peak around the period of 20 s, and the re⁃sponse reaches a peak of 1.22 at 38 s which is out of the wave energy concentration period area.The RAOs of other degrees of freedom motions show different laws at different incident angles, but the natural periods are all kept away from the wave energy concentration period area, which indi⁃cates that the hydrodynamic performance of the foundation is excellent. For example, in the pitch direction, the motion response of the foundation under different incident angles has a secondary peak at 8-12 s, and the primary peak appears near 25 s. When the period is greater than 25 s, the motion response decreases with the increase of wave period. The RAOs characteristics of roll mo⁃tion show similar trends to those of pitch motion,it should be noted that the secondary peak value is located in the wave energy concentration period area, which may lead to larger roll and pitch mo⁃tions.The peak value of yaw motion appears when the wave period is 6 s and the incident angle are 30°,90°and 150°.
3.4 Motion response in time domain
Using SESAM-FAST-ORCAFLEX software, the dynamic response of semi-submersible OWTs under combined effect of wind and wave is analyzed.Each simulation is carried out for 3500 s and the time step is 0.05 s. Due to the symmetry of the structure, five incident angles are set as 0°,15°,30°,45° and 60° respectively.Wind load and wave load keep the same incident direction (see Fig.2).In order to analyze the motion law of the OWTs under different sea conditions,four represen⁃tative combinations of wind and wave conditions are selected, including three operation conditions and one extreme condition, the data consist of wind speed, significant wave height(H1/3) and peak spectral wave period(Tp),as listed in Tab.5 below.

Tab.5 Combinations of wind and wave conditions
Because of the sheer volume of results,only a small fraction can be presented here.As a repre⁃sentative, the 6-DOF motion response time series when the incident angle is 0° under Operation Condition 2 and extreme condition are listed,as shown in Fig.9 and Fig.10.
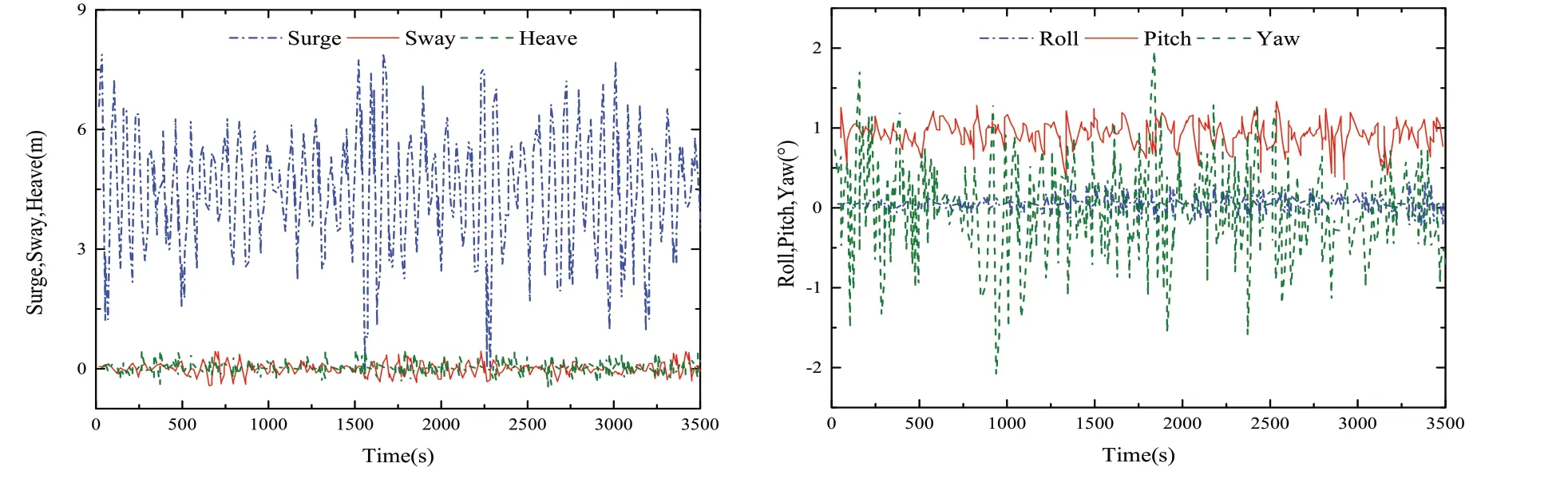
Fig.9 6-DOF motion response time series(Operation Condition 2,incident angle is 0°)
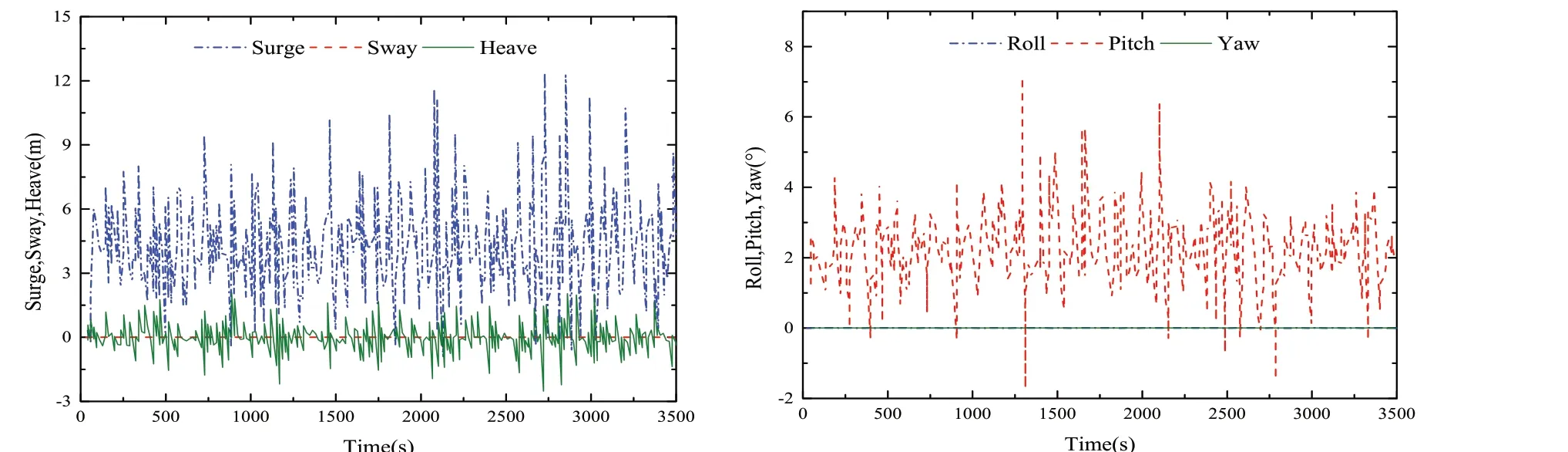
Fig.10 6-DOF motion response time series(extreme condition,incident angle is 0°)
It can be seen from Fig.9 that the maximum value of surge motion of the OWTs under Operation Condition 2 is about 8 m,which is about 4% of the operating water depth.In addition,the maximum values of sway and heave motion are 0.7 m both,and the maximum values of roll,pitch and yaw mo⁃tion are 0.5°,2.3°and 2.4°respectively.
As seen from Fig.10,the maximum value of surge motion under the extreme condition (self-ex⁃isting state) is 13 m, which is about 6.5% of the operating water depth. Furthermore, the maximum values of sway and heave motion are 0.3 m and 3.6 m respectively, the pitch motion is controlled within 7°, and the roll and yaw motion are basically zero. By comparing the results in Fig.9 and Fig.10,it is found that the surge,heave and pitch motions are more severe under the extreme condi⁃tion than under the rated conditions when the incident angle is 0°.
Fig.11 gives the statistical results of the maximum motion response under different incident an⁃gles. The incident angle of wind and wave has a certain influence on the 6-DOF motions, but the degree is different.Under the extreme condition,the influence of incident angle is significantly high⁃er than that of the operation conditions,in particular,the influence on sway,roll and yaw motions is greater.In the six directions of motion,the incident angle has obvious effects on the sway motion of all conditions, and has relatively small effects on the surge, heave and pitch motions. Moreover,un⁃der the extreme condition,when the incident angles are 0°and 60°,the roll and yaw motions are ba⁃sically zero, mainly because the wind turbine is not working at this time and the roll and yaw mo⁃ments are extremely small.
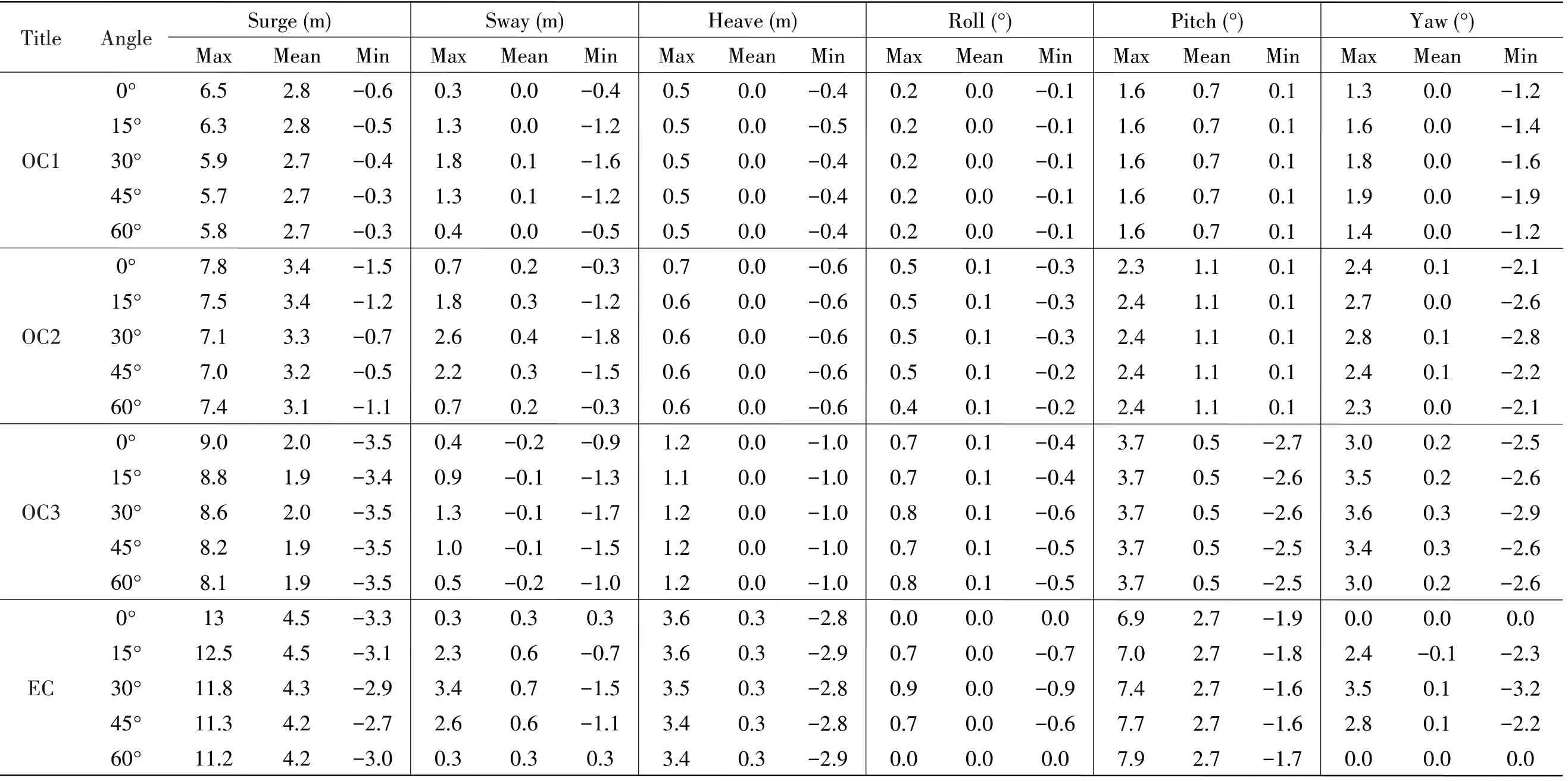
Tab.6 provides a summary statistical results of the motion response of semi-submersible OWTs under three operation conditions and the extreme condition.
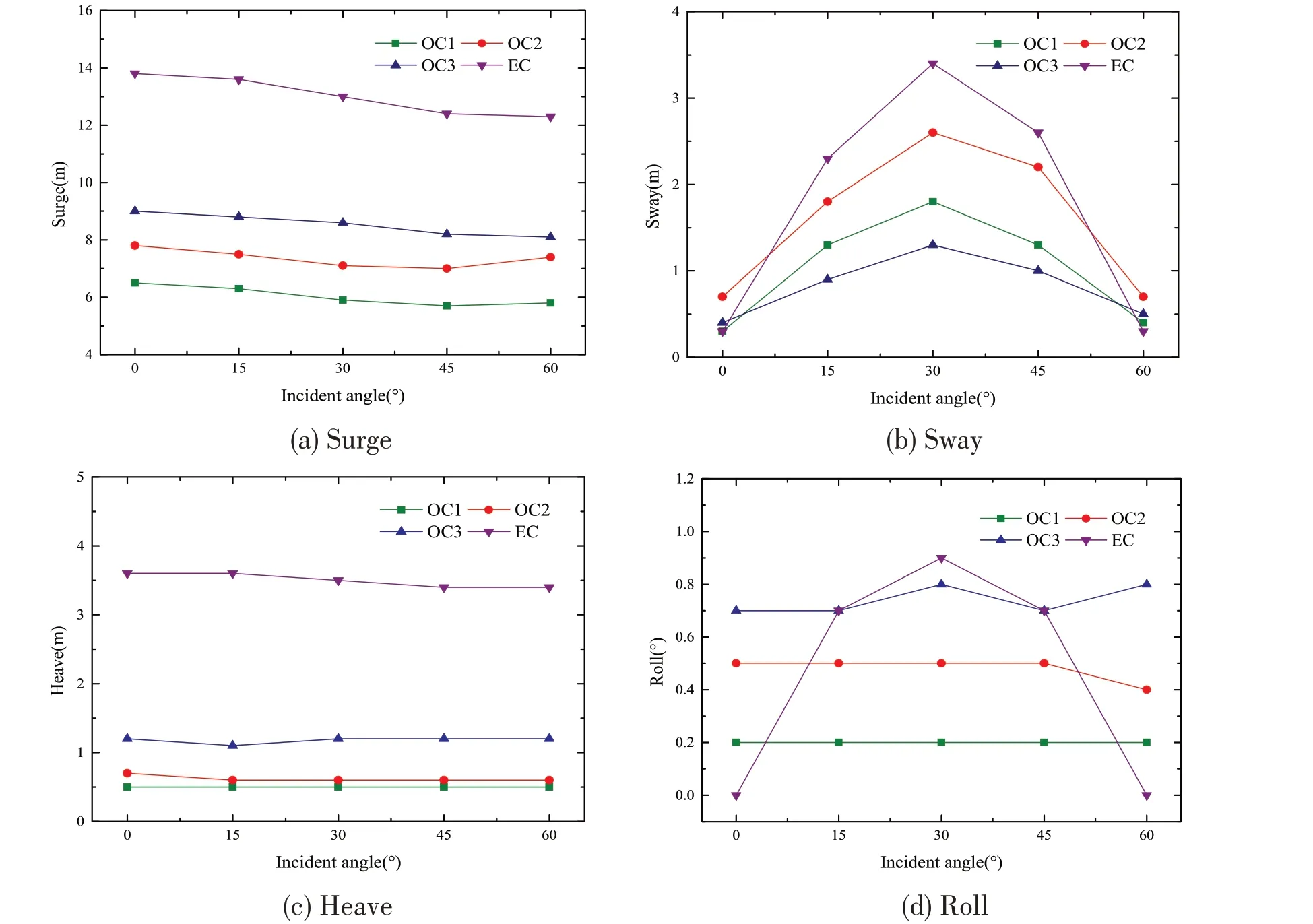
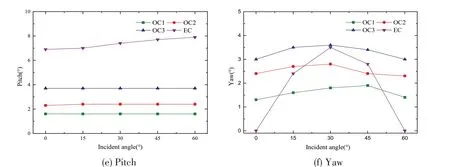
Fig.11 Maximum value of motion response under different incident angles
As can be seen from the data in Tab.6, in general, the incident angle of wind a nd wave has a greater impact on the extreme values of surge, sway and yaw motion, and relatively little impact on heave, roll and pitch motion.Under the above four conditions, the maximum value of surge motion decreases with the increase of the incident angle. Under the same condition, the maximum value of surge motion occurs when the incident angle is 0°, but the mean value of the surge motion is basi⁃cally not affected by the incident angle.Under three operation conditions, the maximum value of surge motion increases with the increase of wind speed, while the meanvalue increases first and then decreases with the increase of wind speed, and reaches the maximum in Operation Condition 2. The maximum and mean values of sway motion first increases and then decreases with the in⁃crease of incident angle, and reaches the maximum when the incident angle is 30°. The maximum,minimum and mean values of heave motion are little affected by the incident angle.The roll motion response is relatively small,as the wind speed increases, the maximum value of roll motion rises slightly.However,under the extreme condition,with the large increase in wind speed,the maximum value of roll motion does not increase significantly,which is mainly due to the decrease of lateral bending moment under the self-existing state.The pitch motion is hardly affected by the incident angle,but its maximum value increases with the increase of wind speed.Besides,under three opera⁃tion conditions, the mean value of pitch motion increases first and then decreases, and reaches the maximum under the rated condition. With the increase of the incident angle, the maximum value of the yaw motion first increases and then decreases,finally,reaches the maximum value when the inci⁃dent angle is 30°.Under three operation conditions,the maximum value increases with the increase of wind speed,but decreases under the extreme condition.
Generally, the maximum values of surge, sway, heave and pitch motion response are 13 m, 3.4 m, 3.6 m and 7.9°respectively under the extreme condition, which may be due to the fact that the aerodynamic damping force is reduced in the self-existing state and the wave frequency is close to the resonance frequency of the structure,resulting in a larger motion response[15].Although they can still meet the requirements of no more than 8% of water depth and no more than 15° specified in the code,great attention also should be paid to the safety of the OWTs under the extreme condition.
The motion response of three different types of semi-submersible OWTs under the similar envi⁃ronmental condition(rated wind speed is 11.4 m/s, incident angle is 0°) are compared,as shown in Fig.12.
Tab.6 Statistical results of motion response
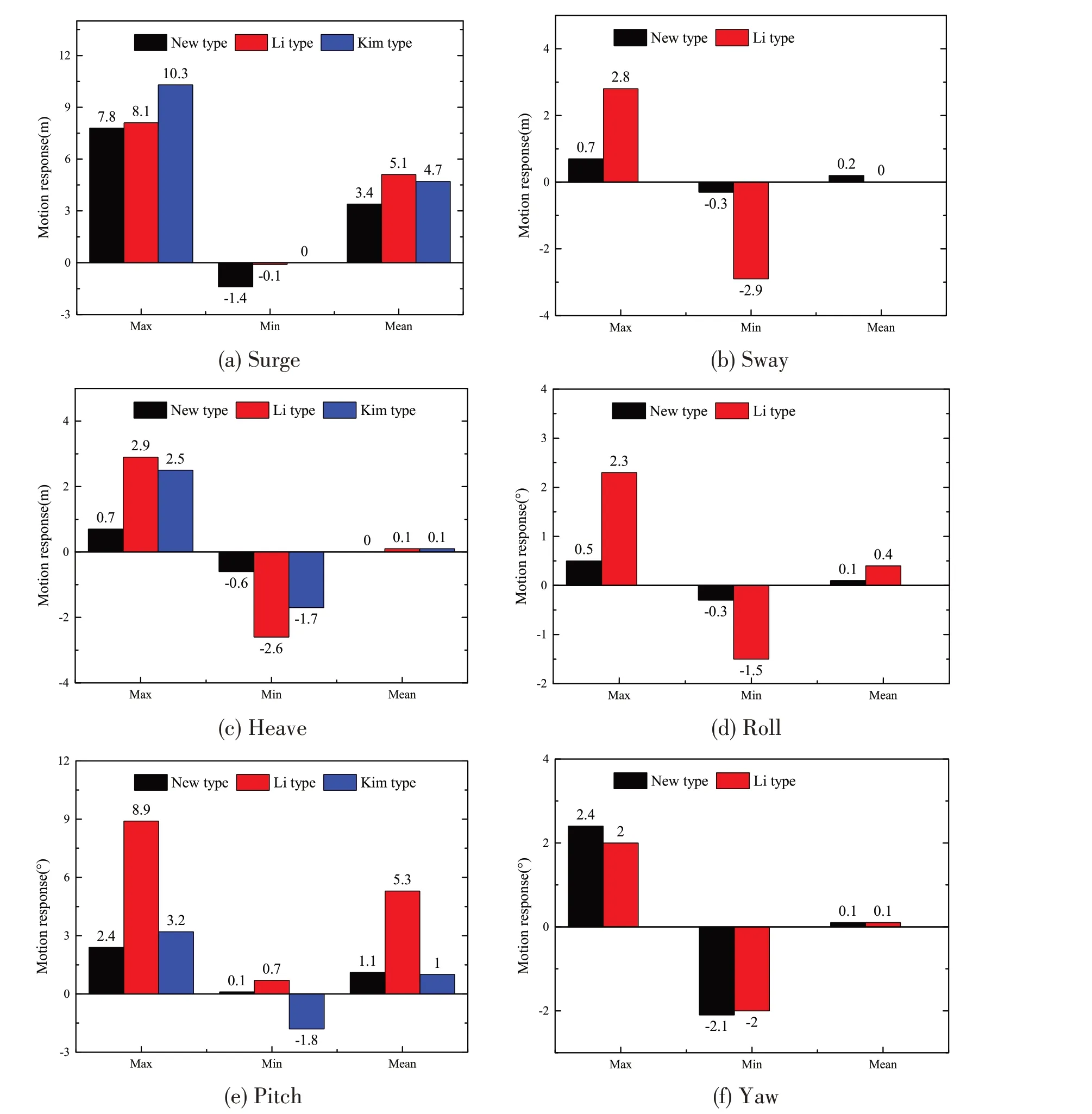
Fig.12 Motion response of three semi-submersible OWTs under the similar environmental conditions
As can be clearly seen from Fig.12 that the new semi-submersible OWTs has obvious advan⁃tages in sway,heave, roll and pitch motion performances, and the maximum values of motion re⁃sponse are reduced by at least 300%,72%,78%and 25%respectively.
3.5 Mooring force
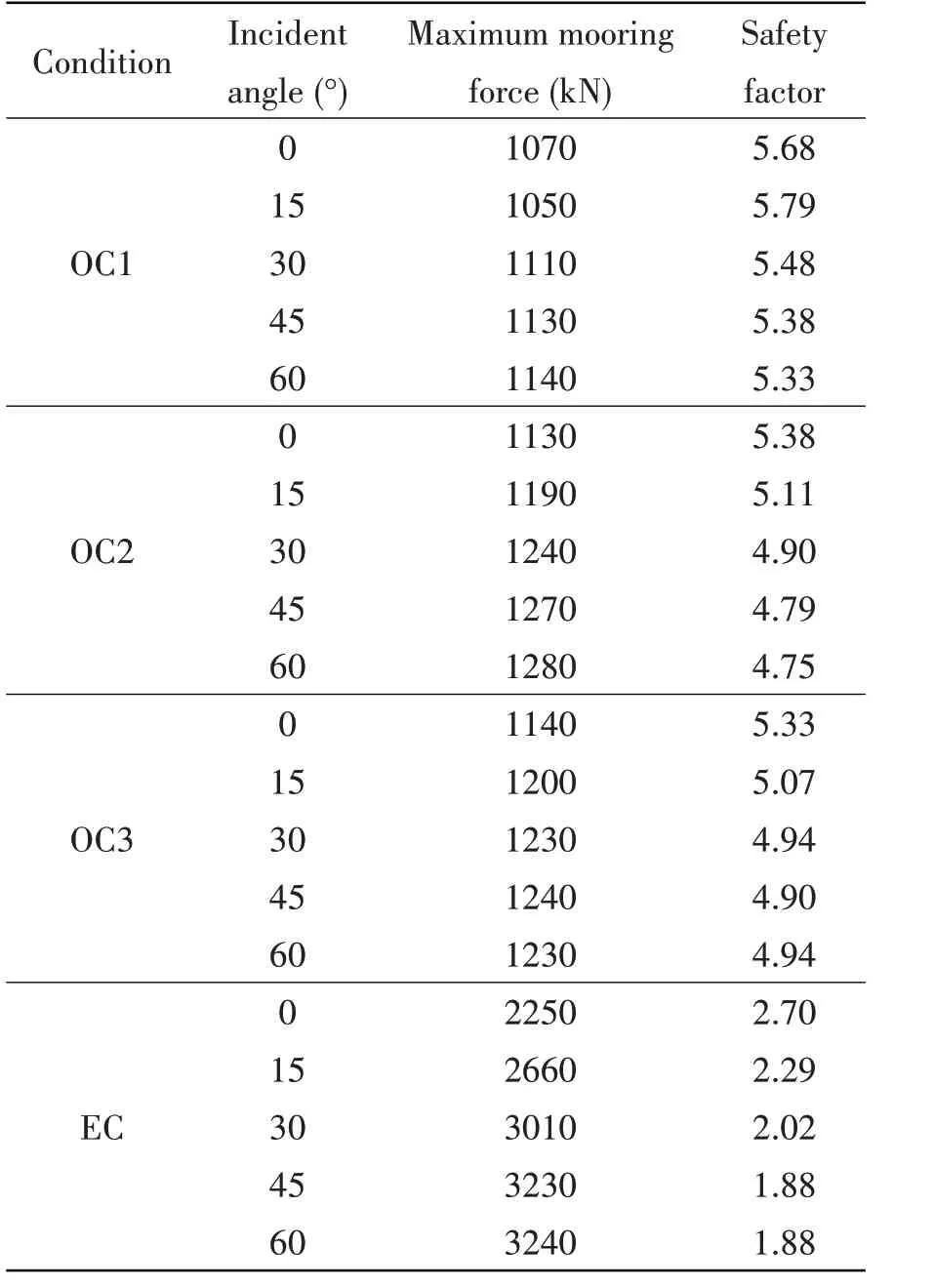
The mooring system is one of the key factors affecting the motion response and safety of the OWTs system. Simulation calculations are carried out for the mooring force under different condi⁃tions and incident angles in this paper. Tab.7 shows the statistical results of the maximum value of mooring force.
It can be concluded that under the same operation condition, the mooring force generally in⁃creases with the increase of the incident angle.When the mooring system is under Operation Condi⁃tions 1 and 2, the force of No.4 mooring line is the largest when the incident angle is 60°, which are 1140 kN and 1280 kN respectively;Under Operation Condition 3, the force of No.5 mooring line is the largest when the incident angle is 45°,which can reach 1240 kN. According to the API specification[16], when the dynamic method is used for analysis, the equivalent safety factor of the mooring system can be taken as 1.67, there⁃fore,the safety factors of all above operation con⁃ditions meet the requirements of the specification.Under the extreme condition, when the incident angle is 60°,the maximum force of No.4 mooring line reaches 3240 kN, which is the most danger⁃ous situation to the safety of OWTs system. At that time, the safety factor is 1.88, which can still meet the requirements of CCS code for mooring safety of OWTs system in self-existing state.To summarize, it is demonstrated in this study that the incident angle has a great influence on the mooring force, especially under the extreme con⁃dition, the maximum value at 60° is about 1.5 times of that at 0°. Furthermore, it should be noted that the mooring force is relatively larger at the incident angles of 45° or 60°, which are likely to threaten the safety of the mooring system.
4 Conclusions
Tab.7 Mooring force under different conditions and incident angles
With the new designed semi-submersible OWTs taken as the object, the motion performance and mooring force under the combined effect of wind and wave are calculated and analyzed by com⁃bining the frequency and time domain methods,the following conclusions are drawn:
(1) After structural improvement, the natural period of 6-DOF motions of the designed semisubmersible OWTs can be kept away from the wave energy concentration period area, which over⁃comes the common defect of poor heave performance of a typical semi-submersible structure, and has greater advantages compared with other types of semi-submersible foundations.
(2) The incident angle of wave has little effect on heave motion response, but has different de⁃grees of influence on other directions. The RAOs of heave, roll and pitch motions have a primary peak and a secondary peak,but the peak periods are both far away from the wave energy concentra⁃tion period area. The RAO of yaw motion increases first and then decreases with the increase of wave period at incident angles of 30°,90°and 150°and is almost zero at other angles.
(3)The incident angle of wind and wave has considerable effects on the dynamic response and mooring force of the OWTs.Specifically,the incident angle has a great influence on the extreme val⁃ue of surge, sway and yaw motion, while the influence on heave, roll and pitch motion is relatively small. The maximum values of surge, sway, heave and pitch motion response all appear under the extreme condition.Under the same conditions, the mooring force generally increases with the in⁃crease of incident angle.The mooring force reaches the maximum when the incident angle is 45°or 60°, which is likely to threaten mooring safety. Compared with the operation conditions, the wind load under the extreme condition is smaller, but the mooring force is greater, with the implication that the mooring force is mainly dominated by wave load, and great attention should be paid to the design of the mooring system.
- 船舶力学的其它文章
- An Approach for Connector Arrangement of Very Large Floating Structures
- Structural Redundancy Verification for Side Shell Frame of Single Side Skin Bulk Carriers
- Dynamic Mechanical Behavior and Constitutive Relation of Shipbuilding E36 Steel
- Buckling Characteristics and Influencing Factors of Composite Grid Sandwich Plates with Soft Core
- Investigation on the Resistance of Planing Hulls Based on a New Mathematical Model
- Application of Computational Methods for Hydrodynamic Pressure Caused by Supercritical Ship in Shallow,Finite or Deep-depth Waters