
基于PLC的气动爬杆机器人教学实验台的开发与设计
2022-06-18 08:00沈灿钢黄振华
电子元器件与信息技术 2022年4期
沈灿钢,黄振华
1.江阴职业技术学院,江苏江阴,214405;2.中国卫星海上测控部,江苏江阴,214405
0 引言
机器人发展至今,已经出现了极多的分支,爬杆机器人因其实用性而成为机器人家族中一个较大规模的分支。爬杆机器人种类众多,按照行动方式可以分为轮式、蠕动式等,按照驱动方式可以分为电动、气动和液压等不同能源驱动的爬杆机器人,可见爬杆机器人家族规模之大,而且通过不同功能以及不同能源的组合又可以诞生更多新型的爬杆机器人。像东京大学研制出了可以在多种环境下工作的,可以轻松跨越平行杆和绕L型杆爬行的关节型行走机器人。国内如清华大学也研发出了采用不同机构控制的爬杆机器人,但该机器人只可以单向爬行,并且局限过大、设备成本过高。
爬杆机器人种类众多,但大多受到环境的局限,工作范围受限,只能局限在一种特定的环境工作,像管道等特殊环境还无法进入进行工作。且设备成本以及维护成本过高、耗能过大也一个主要问题。目前国内外还没能研制出工作范围较万能并且功率大耗能低的机器人,这类机器人需求很大。
1 气动爬杆机器人的控制方案
本文根据人体肢体运动模拟人体爬行动作,设计出一种使用气动作为清洁能源的仿人体爬行机器人实验平台。该设计采用西门子S7-200 PLC进行编程控制、昆仑组态软件实现动态监控,使用电磁阀组与其他气动元件组合,从而构建出一个优秀的控制监控系统,可以及时监控并反馈爬杆机器人的运动状态,以实行高准确度的控制,提高精确度降低错误率[1]。系统结构如图1所示。
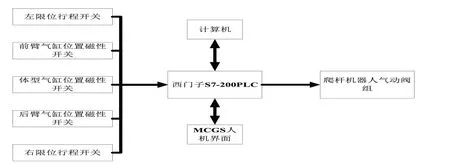
图1 控制监控系统构图
2 气动爬杆机器人的结构
爬杆机器人的爬行结构是由多气缸组合而成的,从而可以实现爬行运动,所有气缸均具有高精度、短行程的特点。设计的爬杆机器人主要由三个部分组成[2]:前后臂爬行、夹紧结构、体形爬行结构,通过对前后臂的夹紧、释放以及体形缩回伸出动作的配合进行控制实现机器人的爬行功能。气动爬杆机器人采用了人体模拟设计,这个机器人由可移动形体、多个传感器以及控制系统等组合而成,可以模拟人类和生物行为[3]。且该机器人使用了多种电磁阀进行组合实现控制,设有过行程缓冲装置保护设备安全,同时设有限位行程开关装置提供电信号反馈从软件上保护设备安全[4],如图2所示。
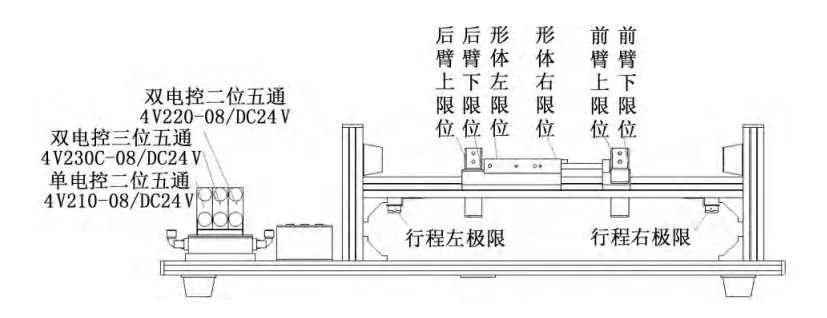
图2 气动爬杆机器人结构示意图
3 爬杆机器人的硬件设计
3.1 电磁阀选型
采用亚德客4V 200系列的电磁阀,其接口口径为8.5mm。工作特点:(1)安全性高;(2)操作简单,性价比高;(3)运行速度快、功率较小、体态轻盈;(4)工作范围受限;(5)种类多样。这次设计爬杆机器人使用电压为24V、电流为4.5A的电磁阀,实物如图3所示。

图3 电磁阀示意图
3.2 爬杆机器人的气缸
设计中采用了AIRTAC的2款气缸,这2种气缸结构精密,控制精度高[5]。第一种是超薄气缸,安装于爬杆机器人的前后臂,为爬杆机器人爬行时提供抓力;第二种气缸是亚德客TR16X50-S型号的双轴气缸,安装于机器人躯干部位,使机器人实现了体形缩回和伸出。爬杆机器人气缸如图4所示。

图4 超薄气缸和双轴气缸
3.3 气动爬杆机器人的气动控制系统
通过控制、执行、辅助元件以及气源装置共同组成气动控制系统。爬杆机器人的气动原理如图5所示,其中B1-B6都是磁感应接近开关,分别位于前后臂气缸的最上端和最下端以及体形气缸的左右两极限位置,其中前后臂都采用了相同的超薄气缸,分别由3个电磁阀控制前臂、体形、后臂气缸[6]。电磁阀装在汇流板上构成电磁阀组,每个电磁阀都独立工作。PLC的接线图如图6所示。

图5 爬杆机器人的气动原理图

图6 S7-226PLC接线图
4 气动爬杆机器人的软件设计
4.1 PLC软件的地址分配表与流程图
气动爬杆机器人在控制中采用PLC和触摸屏结合的控制方式[7],PLC的地址分配包含实物硬件按钮和触摸屏软按钮,气动控制阀分前臂加紧、后臂加紧、机器人形体伸出、机器人形体缩回,地址分配如图7所示。
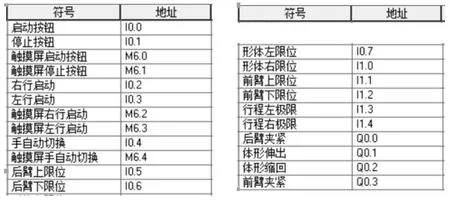
图7 PLC地址分配表
软件设计流程如图8所示。系统进行初始化,按下启动按钮,机器人躯体向右爬行,若碰到右限位停止运动,到达右极限位置延时停止;机器人躯体向左爬行,到达左极限位置延时停止[8]。
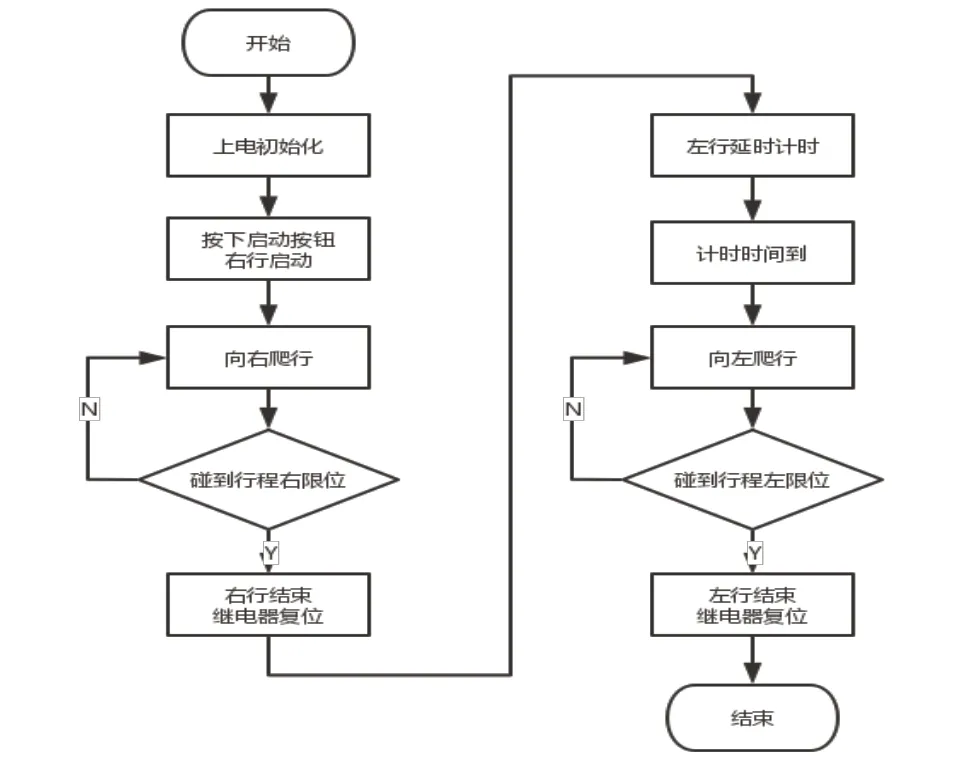
图8 PLC程序流程图
4.2 PLC程序设计
爬杆机器人向右运动爬行的程序如图9所示。网络3:爬杆机器人前臂夹紧、体形缩回2秒。网络4:2s时间到后,爬杆机器人前臂夹紧、体形缩回复位且后臂夹紧、体形伸出。网络5:爬杆机器人后臂夹紧、体形伸出2s。网络6:2s时间到后,爬杆机器人后臂夹紧、体形伸出复位且前臂夹紧、体形缩回。网络7:向右爬行,碰到行程右限位时,所有线圈复位,停止运行[9]。
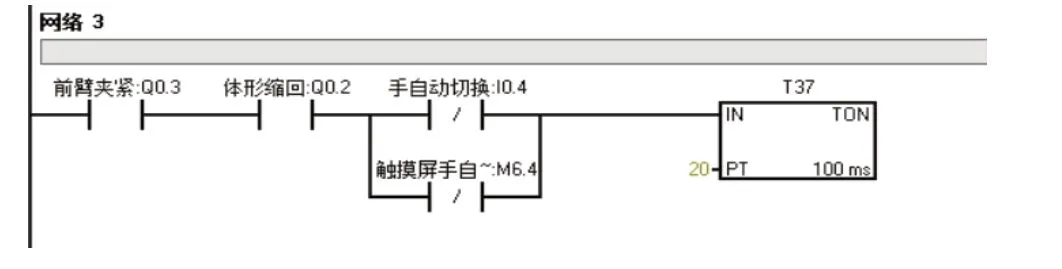
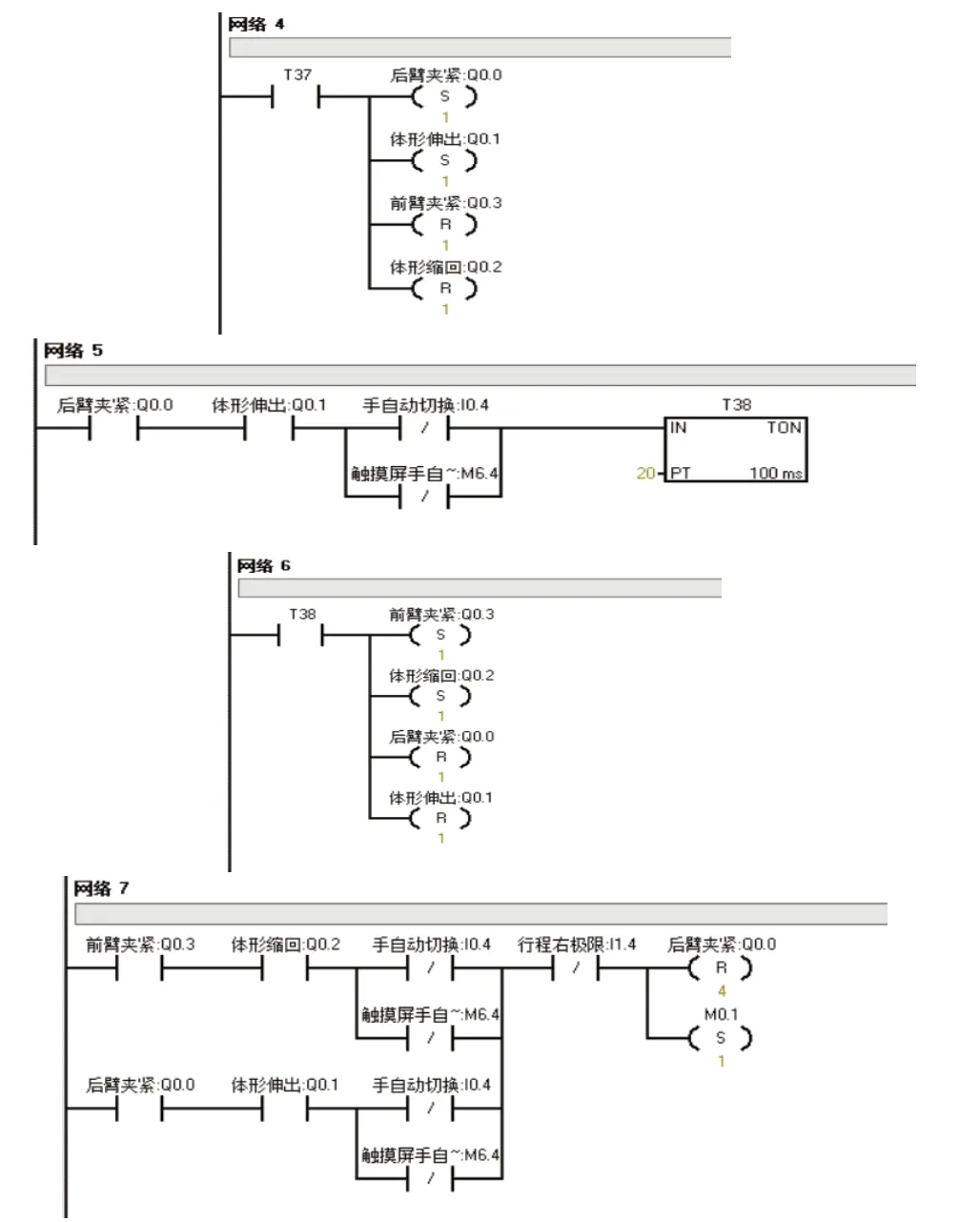
图9 爬杆机器人向右运动爬行的程序
4.3 MCGS组态设计和通信
组态画面如图10所示,在画面设置完成后进行通信连接,爬杆机器人控制器采用的是西门子200CPU226PLC。设置西门子通信端口为COM1,默认参数为波特率9600。采用MCGS触摸屏作为系统人机界面,使用标准的PPI/PC通信电缆或者RS232转换器进行PLC与组态串口的通信[10]。

图10 爬杆机器人MCGS控制界面
5 结语
本文设计了一种基于西门子PLC和AIRTAC气动元件的气动爬杆机器人实验台。主要由前臂与后臂爬行结构、前臂和后臂夹紧结构、躯干结构、缓冲保护装置、边界保护装置、多点定位传感器、特殊爬升杆结构组成,气动电磁阀组合及输入输出口接口模块。这次设计的是在平面上拟人爬行的爬杆机器人,通过前后臂夹紧爬行以及体形伸出缩回结构完成机器人的爬行。本爬杆机器人实验台可以实现水平方向8m的往返运动,运动速度为140mm/min,在杆状平台上可以自由实现往返运动,运动速度可以调节。
爬杆机器人环保清洁,可以帮助人们完成特定的作业,是一种专门用于攀爬杆状物的机器,可以协助或者代替人工完成一些高风险的作业,如电线杆、交通灯上的作业等。爬杆机器人还可对5~15m的杆状物体表面上漆或者加上电镀层。
猜你喜欢
英美文学研究论丛(2022年1期)2022-10-26
实用手外科杂志(2022年2期)2022-08-31
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
科学导报·科学工程与电力(2019年7期)2019-09-10
儿童故事画报·智力大王(2019年5期)2019-07-14
科学之谜(2018年5期)2018-07-26
oggi今日风采(2013年6期)2013-10-09
海外英语(2013年5期)2013-08-27
