
通过磁力引导可在肺部精准采样或癌症治疗科学家开发两毫米直径的磁性机械手机器人
2022-06-17 23:18
海外星云 2022年11期
在临床中,将机器人作为一种辅助治疗工具,应用于疾病检测或治疗的现象越来越普遍。
2020年12月,利兹大学风暴实验室彼得罗·瓦尔达斯特里教授团队开发出一种机器人辅助结肠镜检查,该技术可以通过外界工具引导,使得检测仪器精确地到达人体内患病部位。这为医生提供了一种深入人体内部检测的新思路,同时也帮患者减轻因传统检测带来的痛苦。
近日,彼得罗·瓦尔达斯特里的最新研究成果,与以上所提及的研究成果类似,同样是将机器人辅助技术应用于临床,有区别的是针对患者的检测部位不同。
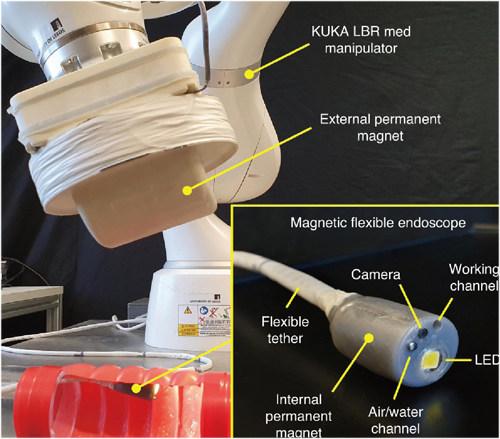
彼得罗·瓦尔达斯特里团队本次开发了一种直径仅有2毫米的“磁触手机器人”,如果用可视化的物体来描述,该机器人的尺寸仅有约圆珠笔笔尖的2倍,如此大小的机器人可以较为容易地被递送到人体肺部一些窄小的支气管树,帮助医生采集组织样本或者辅助治疗癌症等疾病。
2022年3月21日,相关论文以《用于创伤自主内窥镜的患者专用磁导管》为题发表在Soft Robotics上,由利兹大学风暴实验室教授彼得罗·瓦尔达斯特里担任通讯作者。
该研究成果指出,“在微创手术领域,柔性内窥镜和导管之间的关系仍然难以捉摸”。

另外,在人体微妙且曲折的气管环境中遵循阻力最小的路径,而不依赖于周围解剖结构的相互作用,这需要对检测物的自由度进行更多地控制,在此情况下往往需要使用大直径的仪器。
在不增加导管尺寸的情况下,一个可行的解决方案是通过多点磁驱动导管的长度进行传递。而该团队开发和设计了一种长度為80毫米,直径为2毫米的全成型软磁导管,能够在人体解剖中按照特定的方向传递。
不仅如此,该磁触手机器人还可以根据患者的实际情况进行特定的术前扫描。同时,该团队还优化了导管的磁化剖面和形状驱动场。
目前, 临床上大部分医生都在使用一种支气管镜仪器对肺部和气道进行检查,将直径约3.5毫米~4毫米的柔性管状器械通过鼻子或嘴巴进入支气管通道。由于这种柔性灌装器械的尺寸限制,只能伸入到支气管束的上层。
为了开发更适合临床检测的机器人系统,研究小组必须解决两个主要难题:首先,该研究小组需要开发一种尺寸合适使用方便且能够控制的支气管树检测设备;其次,他们需要设计一个自主系统来引导磁性触手机器人就位,从而减少医生在手术过程中手动将仪器操纵到位的过程。
由于第二种情况通常需要患者暴露于X射线之下,使医务人员在安全性控制上具有一定的挑战性。
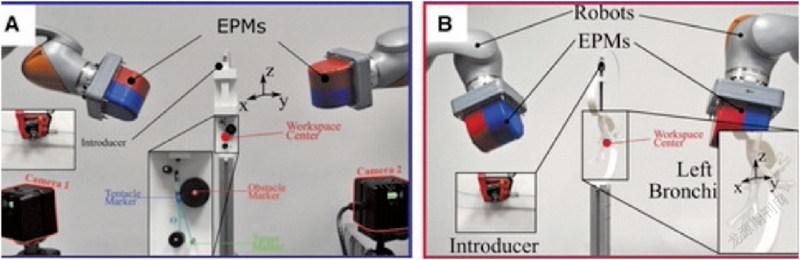
为了改变传统机器人的尺寸,同时保证递送时的可控性,该研究小组用一系列相互连接的圆柱形材料制造了新的机器人。为了产生所需的瞬态磁场,他们还采用了双机械臂系统,这些碎片是由一种柔软的弹性体或类似橡胶的材料制成的,其中浸渍了微小的磁颗粒。
由于磁颗粒的存在, 在外部磁场的作用下,机器人衔接在一起的部分可以在一定程度上独立移动,该团队制作的3个独立机器人原型,能够在预先设定的条件下演示,进而通过三维支气管树模型进行最小接触导航。
这种磁性触手机器人不仅高度灵活,还能变形,尺寸足够小,其最大的亮点是,可以避免被肺部的解剖结构受到阻碍。
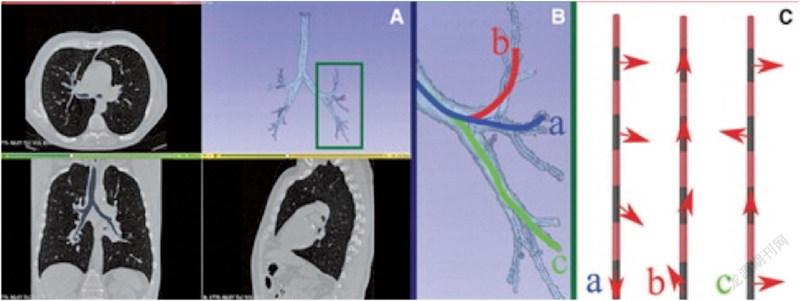
为了调试磁触手机器人的性能,该团队针对四个单独设计的导尿管和机械设备进行了对比。
他们发现,这些导尿管只在垂直方向的顶端有轴向磁化曲线,用外部磁铁引导的方法, 展示了高50%的准确跟踪,在最先进的导航过程中可减50%的障碍接触时间,并将瞄准误差提高了90%。
值得关注的是,该团队可以为患者量身定制机器制导系统,使得磁触手机器人在人体外部机器臂上磁铁的作用下,引导设备进入人体内部。人体导管中的磁颗粒能在体外磁铁的引导下改变运动方向,当磁触手机器人从病人肺部到达患病部位时,可在此部位采样或进行辅助治疗。
可以说,这项技术创造了一种低成本内窥镜的原型,能够对人体上消化道进行研究,进而让购买不起昂贵筛查设备的中低收入国家受益。
然而,该磁性触手机器人技术在医院的临床应用,可能还需要几年时间。据悉,利兹大学风暴实验室正在努力改变内窥镜和导管研究中的使用技术。
猜你喜欢
中国典型病例大全(2022年9期)2022-04-19
青年文学家(2021年23期)2021-09-08
环球时报(2021-06-25)2021-06-25
医学概论(2021年18期)2021-01-21
健康之家(2020年14期)2020-04-28
健康博览(2018年11期)2018-01-02
科技视界(2017年14期)2017-10-09
今日健康(2016年9期)2016-05-14
足球周刊(2014年6期)2014-03-03
文苑·感悟(2012年6期)2012-06-11
