基于ADAMS 的多功能防风固沙种草机的结构设计*
2022-06-16 07:15:38胡志豪吴易泽尹光锋陈萧登
南方农机 2022年12期
胡志豪 , 段 波 , 吴易泽 , 尹光锋 , 陈萧登 , 李 静 , 蔡 力
(湖北大学知行学院机械与自动化学院,湖北 武汉 430011)
0 引言
在提倡“绿水青山就是金山银山”的今天,对土地沙漠化的有效治理被越来越多的国家所重视,同时我国的土地沙漠化状况比较严重,极大地影响了人们的生存环境[1],由此产生了各种各样的治沙方案,不少治沙新技术之间相辅相成,治沙效果逐步显现。“因地制宜,就地取材,因害设防,综合防治”是内蒙古包头市采取的综合措施[2],其防护体系让该地区成为了道路风沙危害防治的首个成功案例。通过查阅大量的文献,课题组发现机械沙障的运用可以对沙漠化的治理起到较为明显的效果,不过高昂的成本、大量的人力与较低的效率是限制其无法大范围实施的主要因素。但是随着科技的不断进步与新材料的应用,治理手段一代代升级,“生物防治为主,机械防治为辅”的理念也逐步深入人心。从采用无机而功能单一的低立式砾石沙障[3],到采用有机并可固土保湿的草方格沙障[4],再到采用新型材料的高密度聚乙烯(HDPE)蜂巢式沙障[5],一代代防治方法正源源不断地被提出与试验。由此可见,沙漠化治理方案和防治措施正不断发展,旨在全力缓解土地沙漠化问题。
设置沙障可以有效固定沙丘,但设置时需要合理利用周围的有利条件。沙障设置的主要原理是增加沙丘表面的粗糙程度,在一定程度上降低风力,防止沙被风带走,起到防风固沙的作用[6],因此铺设草方格是一种目前国内常见的修复环境、治理土地沙漠化的有效方法。然而,在很多沙漠化地区,恶劣的自然环境与复杂的地表状况使传统的人工铺设存在劳动强度大、工作效率低、固沙成本高以及对已铺设好的草方格维护困难等问题。因此,亟需一种新型的不受地表状况限制的机械式防风固沙种草机来取代传统的治沙机械。
1 种草机工作原理
本装置由车架、铺设装置、控制系统和动力单元4 部分组成,种草车整机示意图如图1 所示。
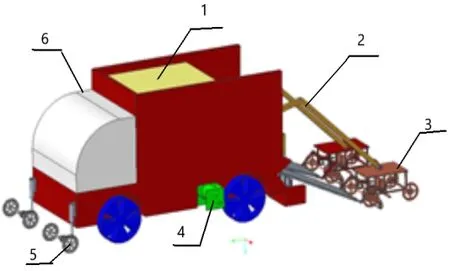
图1 种草机整机示意图
车架上设置有草料箱、草籽箱和水箱,集多种功能于一体可完成草籽播撒、草方格铺设和自动浇水工作,解决人工铺草工序繁多的问题。铺设装置由纵向破沙轮、横向破沙轮、传草带、压草轮和拢土刀组成,可进行开槽、铺草、夯实工作,进而实现对草方格的铺设。控制系统用来精确控制种草机的各个动作。动力单元安装于车架内部,为种草机各执行机构提供稳定且充足的动力来源。种草机工作过程以铺设1m×1 m 草方格为例[7],工作时铺草模块的横向破土锯盘与纵向破沙轮会按照规定的方向转动,机器切割出两条相距1 m 深15 cm 的纵向沟槽,在纵向沟槽切割的同时,横向破土锯盘通过齿轮齿条的啮合向下切割出一条1 m 长15 cm 深的沟槽。沟槽深度可根据土质坚硬程度自由调节,保证麦草能树立固定即可。为减少横向破土锯盘的磨损,课题组增加了速度补偿机构,即在机器整体向前移动的同时,破土锯盘可以在滑轨上利用齿轮与齿条的啮合向机器的相反方向运动,实现破土锯盘在工作时相对静止的功能。该功能可以保证机器能在土质坚硬的地方以最小的损耗完成同样的工作。草带传输机构将草料送到沟槽之上,再由铺设装置上的压刀轮压到沟槽当中,随后由拢土刀将麦草树立固定,完成整体的草方格铺设工作。控制系统由单片机控制,超声波测距模块安装在车架尾部,通过不断调整方向保持种草车直线行驶而不受不平整地形的影响,最终完成草方格的铺设工作。该装置有效降低了种草机的使用难度,自动化程度高,极大地提高了工作效率[8]。
1.1 本装置创新点
本装置有以下创新之处:
1)与传统铺草机相比,设置了横向和纵向同时铺草功能,工作效率更高。
2)铺草数量可根据地形情况自由调节,对于地形复杂不平整且土质坚硬的工况,可选择性使用铺草模块;对于地形平坦且土质疏松的工况,可使用多个铺草模块。相比于其他机器,操作更灵活方便,适应性更广泛。
3)采用超声波测距模块,可以严格控制破沙锯盘与纵向麦草的间距,这是普通的铺草机不能达到的。
4)通过修改编程即可实现不同大小的草方格铺设,使设备的实用性更上一个台阶。
5)机器配置有起重臂,可以实现对铺草模块的收放,节约空间,方便装置结束工作后的回收过程。
1.2 模型建立与仿真
本装置的设计通过运用整合了自由式与参数化这两种建模方式[9]的Creo Parametric 软件对多功能防风固沙种草机进行建模,再结合具备优化处理、计算求解、模型创建等多种功能[10]的动力学分析软件ADAMS 对相关机构进行运动仿真分析。在产品设计完成的同时,能对其结构运动合理性有一个预先的检测,从而大大提高机械产品的设计效率,降低产品生产后出现干涉或运动无法达到预期效果的风险。
1.3 运动仿真过程
将模型导入ADAMS 软件,对一些环境参数进行设置,如图2 所示。其中坐标系选择为笛卡尔坐标系,设置重力加速度G=9.8 m/s2,单位制为MMKS,设置起重臂部件之间的约束,约束方式如表1 所示。
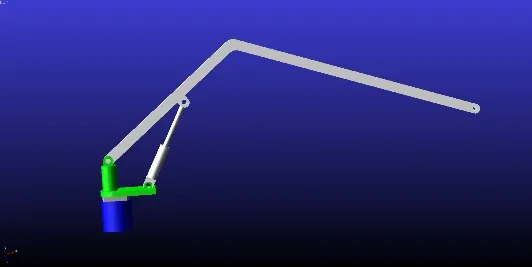
图2 起重臂模型图
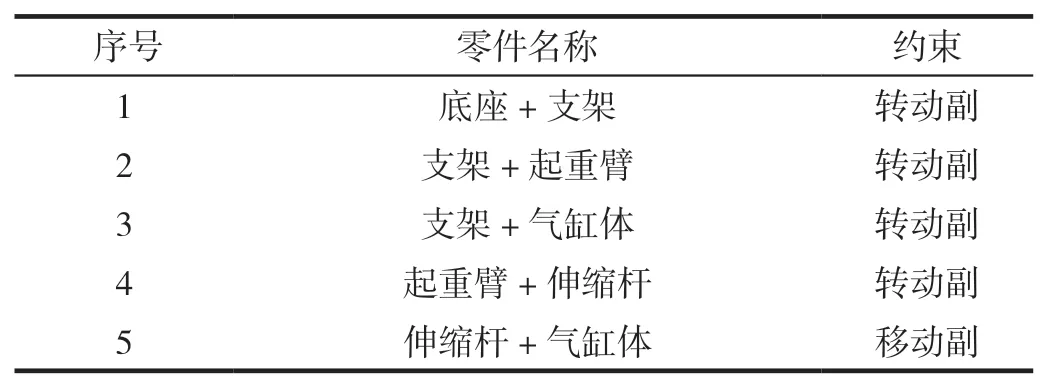
表1 起重臂各部件间约束方式
1.4 ADAMS仿真结果及其分析
本文针对起重臂的速度补偿机构与下刀装置进行结构仿真及后处理并导出结果,设置仿真时间1s转动运行30°,对运动仿真结果进行分析。
在机器运行时,起重臂1 s 旋转30°,同时起重臂完成升起或下降动作,且保证伸缩杆的运动距离不超过气缸行程,从图3 和图4 可以看出,其行程范围为400 mm,在可允许的误差范围内。即起重臂旋转时,起重臂的升起或下降运动不会发生相互干涉,符合设计预期。
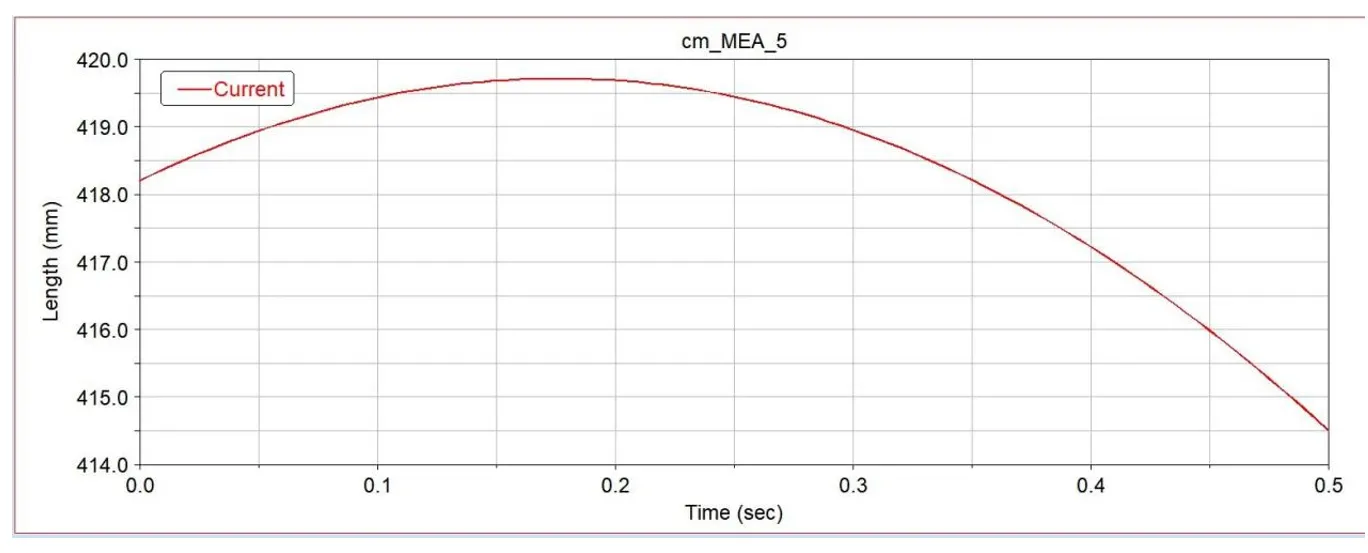
图3 往复横梁工作情况
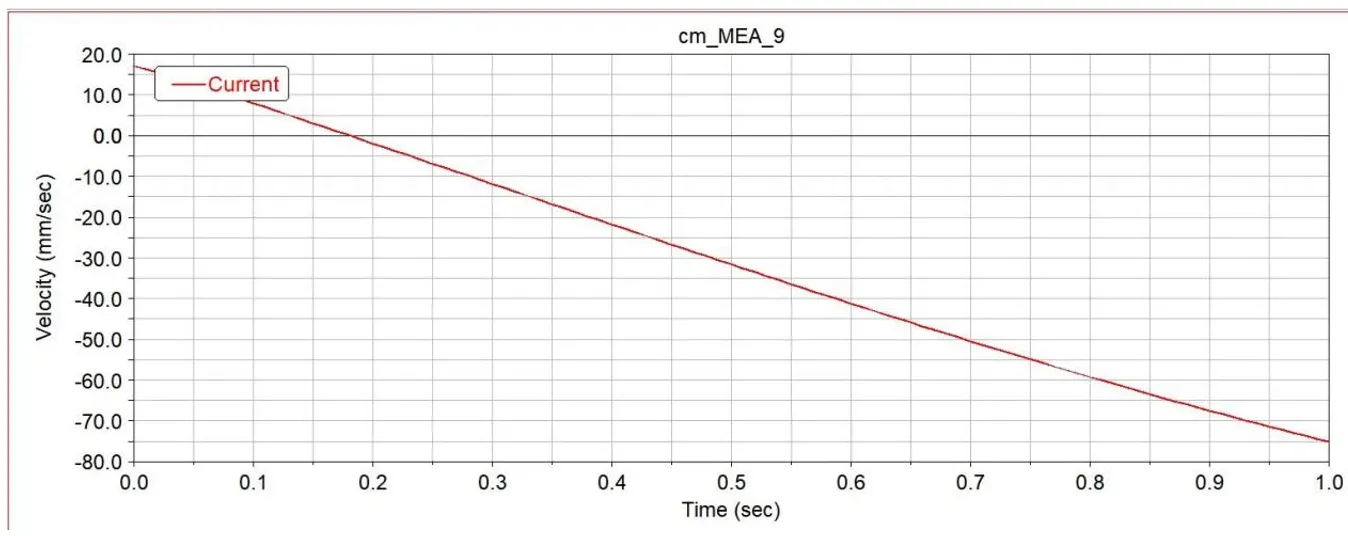
图4 速度曲线
2 总结
课题组设计了一款多功能防风固沙种草机,该装置具有更多的功能,包括可控数量草方格的铺设、铺草模块的收放、超声波测距自动控制行驶等。为了进一步确定该机器的可行性,课题组使用ADAMS 软件进行铺草模块的虚拟样机构建,对机器运行时主要工作部件的运动情况进行分析。仿真结果表明,该装置可以顺利地对预期过程进行仿真,结果符合设计要求,可以很好地实现应该具备的功能。
课题组通过对多功能防风固沙种草机进行设计,让沙漠化治理有了更多的方向,同时有效恢复了沙区植被并提高了沙区生态功能,遏制了我国土地沙漠化蔓延的进程。而在防风固沙种草机不断发展的同时,还需结合有限元分析与轻量化设计,这样不仅可以满足使用的需要,还可以提高设计精度与效率,进一步促进我国环境治理领域向着智能化、多功能化、多元化的方向发展,加快改善我国的沙漠化现状,造福人类。
猜你喜欢
设备管理与维修(2023年14期)2023-08-27 01:39:04
中国特种设备安全(2022年3期)2022-07-08 02:22:48
西北林学院学报(2021年2期)2021-04-08 00:28:42
农业工程学报(2019年16期)2019-10-10 02:23:08
建筑机械(2018年8期)2018-08-16 09:47:42
辽宁林业科技(2017年4期)2017-06-22 10:23:36
现代园艺·综合版(2016年11期)2016-08-29 08:52:48
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
水土保持通报(2014年5期)2014-06-09 08:26:38
科学与财富(2010年12期)2010-06-15 01:12:50