
大型换流站机器人安全巡检系统设计
2022-06-15 09:06姚日斌江林坚吴波
电子设计工程 2022年11期
姚日斌,江林坚,吴波
(中国南方电网超高压输电公司柳州局,广西柳州 210000)
我国能源分布的不均衡状态,严重制约了我国各地区经济的协同发展与各区域人民生活水平的提高,对以电力为代表的能源输运和持续稳定供应提出了较高的要求[1-2]。电力输运主要有交流输电和直流输电两种方式[3-4]。相比于交流输电而言,直流输电所需的线路在相同供电条件下占用更少的线路走廊且损耗也更低,因此我国通过广泛铺设特高压直流输电线路来缓解东西部能源和经济发展的矛盾。目前已铺设和正在铺设的多条特高压直流输电线路,有效推进了西电东送以及与能源国家之间互利互惠的战略规划,利用电力能源再分配实现共同发展和富裕。然而,大规模的特高压直流输电线路带来了巡检与维护工作量大的关键问题,传统的人工巡检方式已无法匹配日益庞大的特高压电网规模,需要借助目前的先进技术替代传统的低效方案,从而有效保障国家与人民的正常生产和生活[5-7]。
基于上述问题,该文基于红外测温和机器人技术,设计了一套面向大型换流站的机器人安全巡检检测系统。该系统具备监控预览、录像回放、地图查看、报警数据分析、报表生成、声音报警等功能,能够利用轨道式与固定式机器人、后台控制软件对换流站的电力设备进行实时检测及分析,从而高效、准确地完成输电线路换流站的巡检工作。
1 理论和技术分析
1.1 红外辐射基本定律和规律
红外辐射波长(0.76~1 000 μm)介于可见光与微波之间,其波段又按照波长不同可划分为15~1 000 μm的远红外、3~8 μm 的中波红外、1.4~3 μm 的短波红外、8~15 μm 长波红外、0.75~1.4 μm 的近红外。
与红外辐射相关的定律主要包括普朗克黑体辐射定律、维恩位移定律、斯蒂芬-玻尔兹曼定律和朗伯余弦定律[8-10]。其中,普朗克黑体辐射定律对黑体向外界辐射电磁波引发的光谱特征进行描述,并表明辐射强度与温度间呈现出明显的正比关系,用数学公式描述为:

式中,C1与C2分别代表了两种辐射常数。根据式(1)可知,电磁辐射能量同黑体的温度和波长存在较为紧密的关系,通过获取温度与波长信息可以计算得到黑体的辐射能量,从而实现对换流站设备的红外测温检测。
维恩位移定律对黑体绝对温度和光谱辐射峰值波长间的关系进行描述,其数学公式为:

根据式(2)可知,光谱辐射峰值随着黑体辐射温度的升高而逐渐朝短波方向偏移。
斯蒂芬-玻尔兹曼定律对物体在绝对零度和对外辐射能量间的关系(波长无限大条件下)进行描述,其数学公式为:

式中,σ代表斯蒂芬-玻尔兹曼常数,Mb(T)代表电磁辐射在全波段积分后的总能量。
朗伯余弦定律则是对不同观测方向下的黑体辐射强度进行描述,其数学公式为:

式中,I0与Iδ分别代表了法线方向和与法线存在δ角度时的辐射投影强度。根据式(4)可知,红外测温时需要注意测量角度对测量结果造成的影响,两者存在cosδ倍的关系。
1.2 红外测温原理
目前,针对电力设备的红外测温主要通过红外热像仪和红外点温仪实现[11]。相比于红外热像仪,红外点温仪结构简单且价格低廉,但也存在测量误差大、扛干扰能力弱、检测效率低等缺陷,无法对表面不均匀的设备进行整体温度检测。因此使用红外热像仪更能满足电力设备的准确、高效检测要求,其测温实现原理如图1 所示。电力设备向外界发出的电磁波被光学系统接收后,由探测器和放大器对其进行转换和放大处理,最终设备发出的电磁波以彩色图像的形式输出在显示装置上。根据这一原理,即可对电力设备的整体温度进行获取、检测和分析,从而实现大型换流站的自动安全巡检工作。

图1 红外测温实现原理
1.3 电力设备热缺陷及常见诊断方法
根据电力设备热缺陷发生在设备的不同位置,可以将热缺陷分为外部热缺陷和内部热缺陷,前者的诊断通过红外测温直接测量实现;后者则通过与目标相连位置处的红外测温反推实现[12-16]。按照电力设备热缺陷发生的严重程度,可将热缺陷分为危险、严重和一般3 个级别。当出现严重及以上缺陷时,通常可采用温度阈值判别法进行诊断,即将异常状态下的温度同正常状态下的最高温度阈值进行对比和判断,当超过最高温度阈值时,即判定为存在缺陷。此外,可以通过使用温差比判别法、同类设备比较法等方法对热缺陷进行快速诊断。
2 巡检检测系统分析和设计
2.1 需求分析
为了满足大型换流站安全巡检检测的需要,该文设计的系统必须能够在强电磁场干扰下进行工作。此外,在使用场景上需要能够在以下外界条件中正常运行:海拔高度≤3 000 m;环境温度介于-10 ℃~60 ℃;抗震能力:水平与垂直方向上的加速度分别为0.3 g 和0.15 g;相对湿度5%~99%;大气压力70~106 kPa。在通信上需要满足千兆网络实时传输的性能要求,提供数据交换协议(包括机器人管理接口、基础支持接口和任务管理接口等数据接口)和业务数据接口约定,从而实现远程控制与数据上传、用户权限与密码登录等功能。在数据库上,需要提供数据存储和查询功能;在机器人自动巡检上,需要提供多种巡检方案的自动化运行;在电源供电上,需要能够在(220±20)V 的电压下正常工作,且能够应对交流电源突然断电和来电的突发情况。
2.2 系统总体设计
安全巡检检测系统的总体设计如图2所示。基于这一系统架构,文中的巡检机器人在设置好预置位后,每过一段时间间隔,机器人就能够沿着设定路径,对换流站内的电力设备进行图像抓拍,再传输给后台工作站进行温度数据分析,然后将分析结果保存在数据库中并生成曲线,当出现温度异常时执行报警操作。

图2 安全巡检检测系统的总体设计
2.3 终端检测层的设计
终端检测层中的巡检机器人类似于全景摄像头,包含了云台、高清网络摄像机、红外热像仪和扬尘气象传感器。
该文巡检机器人工作的垂直导轨长8 m,为蜗杆传动方式,重复定位精度为±3 mm,使用寿命大于1万公里,传动速度为5 m/min,支持TCP/IP 协议。由客户端接收层工作站安装的控制软件,可对PLC 控制芯片进行操作,进而借助网络通信模块(硬件包括网络线缆、无线中继和网桥等)对伺服电机进行控制,从而实现巡检机器人的上下精准移动和停靠。
2.4 网络传输层的设计
换流站为特殊环境,具有高电磁场、高压、高辐射等特点。网络传输层的无线部分采用多网桥组网方式在换流站搭建多个基站,借助交换机连接到客户端接收层的网络收发模块,最终与工作站软件相连。各基站安装有高增益的发射天线,从而实现无线网络在换流站的无死角覆盖。
2.5 客户端接收层的设计
客户端接收层控制软件的系统结构如图3 所示,其模块分别为预览监控模块、回放录像数据模块、地图模块、报警数据分析模块等。
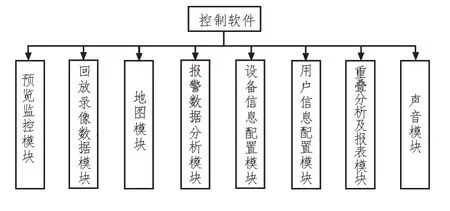
图3 客户端接收层控制软件的系统结构
用户信息配置模块主要用于对用户的查找、增删和编辑等功能。可根据用户权限设置用户类型,管理员是具备所有权限的超级用户;操作员具有预览监控、回放录像数据、地图、声音报警、报警数据处理、重叠分析及报表操作功能;客户具有预览监控、回放录像数据、声音报警、报警数据处理、重叠分析及报表操作功能。
预览监控模块包括视频实时预览、双路视频录像、双路图像抓取以及云台控制功能。视频实时预览功能可以切换1路同屏、2路同屏、4路同屏、9路同屏、16 路同屏、25 路同屏、36 路同屏,供各类用户选择使用,并可通过抓图录像将检测结果存储下来;云台控制功能可以根据用户需要,通过调节速度、焦距、视场、朝向等参数对每台巡检机器人进行手动巡检控制。
设备信息配置模块包括新增数据、删除数据、更新数据、新增预置位、预置位微调功能。该模块主要由管理员进行操作,能够对巡检机器人、导轨、电压等级、线路名称、部件名称、网络参数、预置位、报告模式、巡检功率和频率等信息进行配置。
回放录像数据模块包括巡检数据回放和视频回放两个功能。前者用于对巡检的数据进行图片回放,后者则用于对已保存视频进行回放。用户可根据开始/结束时间、巡检数据类型、监控点和预置位等信息对需要回放的图片与视频进行查询、回放。
报警数据分析模块包括报警数据浏览、分析和保存功能。通过搜索起始/结束时间、云台名称、报警类型、预置位名称、部件名称、缺陷类型等信息条件,以图片和曲线的形式浏览并分析所有满足条件的巡检数据。用户也可以在添加和编辑点、线、圆、矩形、多边形、折线温度、最高/最低温度等辅助信息后,将巡检数据重新保存在数据库中。
重叠分析及报表模块包括曲线信息生成和曲线分析报表生成功能。通过选择云台预置位信息、数据类型、查询时间段,用户可以根据需要生成曲线信息和曲线分析报表,并能够以日报、周报、月报和年报的形式下载并保存。
地图模块主要提供电力设备运行状态显示和通过地图直接跳转到相关预置位进行实时情况显示的功能。用户可以在地图上看到各位置电力设备当前的运行状态,通过点击该位置即可跳转到该区域的实时镜头。
声音模块主要包括声音报警和报警信息处理功能。当某一位置的温度高于报警温度阈值时,声音模块开始报警,直到处理完成;当温度再次上升时才会继续报警。当存在报警信息时,系统会根据报警数据来源在电子地图上调用相关的镜头,查看该报警源的实时情况;若未发现异常情况,则记录该巡检机器人的编号,结合回放功能对当时报警的具体原因进行查看。
除了上述模块外,客户端接收层控制软件的设计还包括了换流站电力设备的红外热图像和可见光图像的处理。由于巡检机器人采集的图像信息中掺杂了较多复杂噪声等干扰信息,需要做出针对性的增强、分割和配准操作,从而减少环境干扰并提高电力设备与缺陷定位的准确性和有效性。文中采用空间域及频域变换对图像进行增强,采用阈值与边缘检测对图像进行分割,并借助共同特征的提取和匹配对红外、可见光图像进行配准。红外热图像和可见光图像的处理效果图如图4 所示。

图4 图像处理效果图
3 系统实现与测试
该文设计的机器人安全巡检检测系统在大型换流站中进行了安装和测试。其中,系统控制软件安装的工作站配置为:Core i7,内存32 GB,固态硬盘256 GB,机械硬盘2 TB。巡检机器人搭载9 套固定式和2 套轨道式云台。
登录系统后可以在用户信息中添加其他不同权限的用户,成功登录系统后默认显示在视频界面。导航界面如图5 所示,其显示了系统的主要8 个功能导航,用户可根据需要选择进入相应的功能操作界面。

图5 导航界面图
图6 为巡检检测系统控制软件预览监控界面,当前显示为4 路同屏的状态。用户可以根据需要,在1 路同屏、2 路同屏、4 路同屏、9 路同屏、16 路同屏、25 路同屏、36 路同屏之间切换,若当前视频未显示完,则可以选择翻页显示;多路同屏时,双击任意一路的红外或可见光视频,则该线路的视频最大化,再次双击即可回到视频导航界面。每路红外和可见光实时视频显示下列有当前监控模式(手动巡检、日常巡检、详细巡检和服务器托管)、当前预置位、部件名称等信息。管理员用户可以通过设备信息配置界面选择新增预置位点对应的巡检机器人,再调整摄像头角度和导轨位置,设置好预置位名称以及新的巡检机器人与导轨预置位编号。若设置的是新导轨的位置,则编号不能重复,以避免预置位被覆盖,然后对预置位信息进行配置和更新。用户可以利用巡检检测系统控制软件报警数据分析功能,根据起始/结束时间、云台名称、报警类型、预置位名称、部件名称、缺陷类型等信息,查找、浏览并分析包括温度曲线、红外热图像和可见光图像等在内的报警数据。

图6 预览监控界面(4路同屏)
该文设计的机器人安全巡检检测系统经过换流站长期的实地运行和调试,能够稳定运行。在遇到电力设备故障时能够快速响应,及时报警提醒操作员进行处理。在断电或来电状态下均能快速作出响应,抗干扰能力强,能够准确、高效地完成换流站电 力设备的自动巡检任务,满足设计预期要求。
4 结束语
文中面向大型换流站,利用机器人技术和红外测温技术,设计了一套智能化的机器人安全巡检检测系统。该系统具备电力设备的监控预览、图像信息处理、设备信息配置、地图定位与查看、报警数据分析、声光告警等功能,能够利用巡检机器人以及后台控制软件对换流站电力设备进行实时检测、分析和报警,满足了换流站的自动巡检要求。
猜你喜欢
电力设备管理(2022年4期)2022-11-25
南方能源建设(2021年4期)2021-12-27
商品与质量(2021年11期)2021-11-24
电子乐园·中旬刊(2021年1期)2021-09-10
数字海洋与水下攻防(2020年5期)2021-01-04
科技创新导报(2020年3期)2020-05-06
电子制作(2019年22期)2020-01-14
建材发展导向(2019年11期)2019-08-24
商品与质量(2018年44期)2018-12-06
电子制作(2017年19期)2017-02-02
