
电缆隧道巡检机器人行走机构设计与仿真分析
2022-06-15 06:12:46钱恒健方永毅刘保安
机械设计与制造工程 2022年5期
李 乾,钱恒健,方永毅,邢 昆,刘保安
(国网石家庄供电公司,河北 石家庄 050006)
电缆隧道是当前高压大容量输电系统的重要管廊,与普通地埋线路相比,电缆隧道的可维护性更高,维护难度相对较大,输电系统对地容性漏电可控性更佳,但巡检维护量更大,而且隧道内空间较为狭窄,还可能存在有害气体。高压电缆管廊的内部环境较为恶劣,使得人工巡检具有一定的风险,故在当前电力系统中,多采用行走式隧道机器人进行机器辅助巡检。机器人除了携带可见光、红外及激光点云成像设施,还携带温度及空气质量探头,借助行走机构的支持,可以每天多次往返于电缆隧道中,提供及时有效的线缆隧道巡检数据。
我国现有关于机器人相关应用研究中,黄双得等[1]研究了一种基于单轨吊式行走机构的架空式巡检机器人的行走机构;虞鸿江[2]对巡检机器人的整体系统整合模式进行了研究,尤其是多系统小空间融合的兼容性问题;韩宇泽等[3]研究了行走机器人在电缆隧道内行走过程的路径障碍处理模式,通过对比多种行走机构,发现架空单轨吊式行走机构的越障性能最佳;程贝贝[4]研究了隧道巡检机器人的控制软件和控制算法,探讨了使用单一嵌入板系统控制整台巡检机器人的实现方案;陈晓勇[5]针对电力隧道视频监控机器人的实现模式进行了分析,使用多种视频探头获得了电力隧道的诸多可用信息;陈析等[6]通过逻辑建图算法对电力隧道的机器人行走定位控制进行了算法研究。综合分析相关文献研究成果,本文拟采用架空式单轨吊系统和齿轨驱动技术实现机器人行走方案。
1 个案概况及需求分析
本文个案为某市的一个箱式电缆管廊隧道,总长度16.7 km,管廊高度2.8 m、宽度2.4 m,管廊两侧分别布置宽度为0.6 m的电缆分层桥架,其中包含1条110 kV三相三线综合橡胶绝缘线路,3条35 kV三相三线综合橡胶绝缘线路,共有各类高压线路12条,分布在管廊两帮。另有2条400 V三相四线共缆线路用于内部供电,4条24芯光缆线路作为内部信号线路,2路载波电话线路作为内部应急通讯线路,如图1所示。
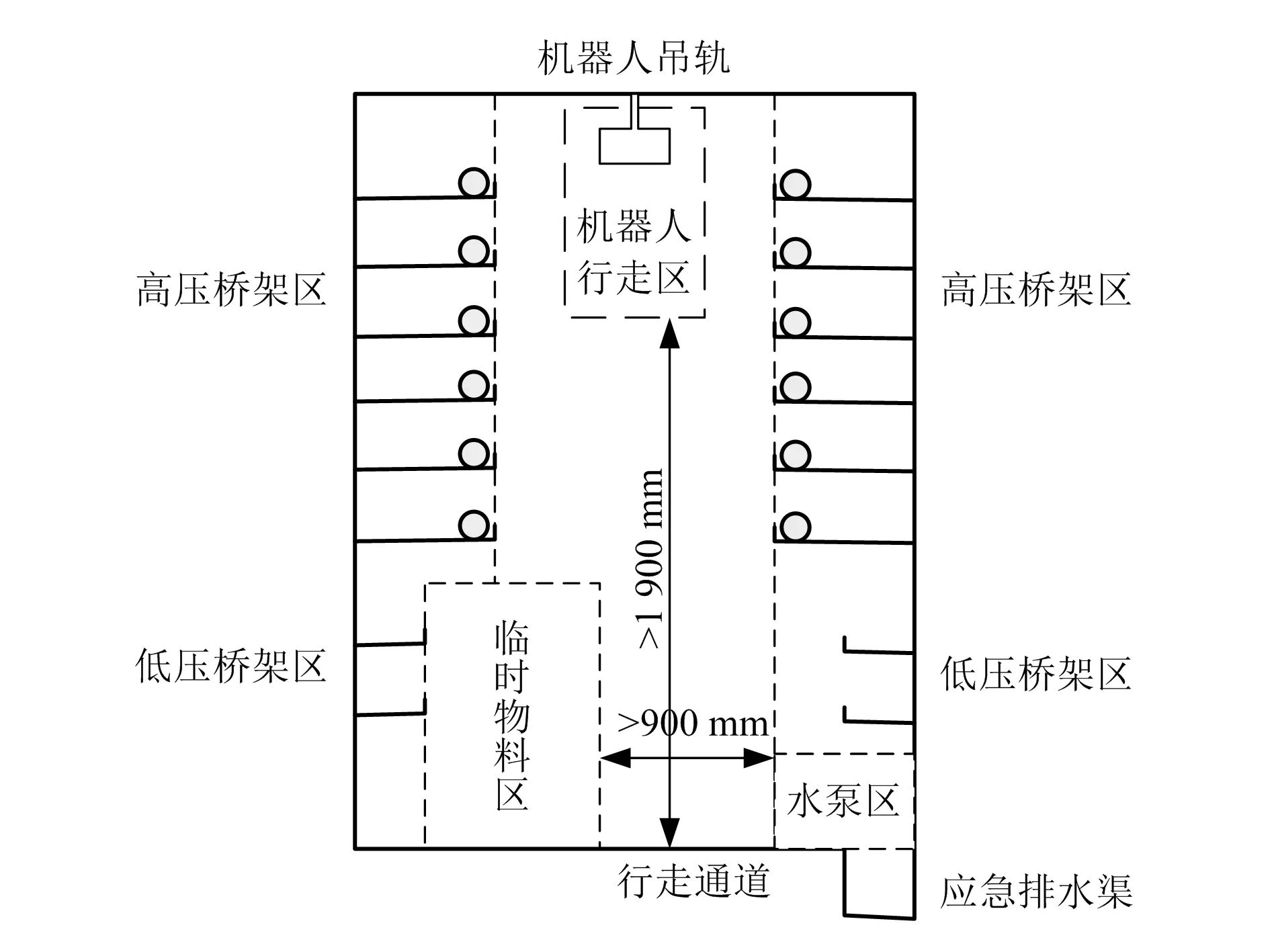
图1 个案隧道的应急空间布局图
所选择的隧道总净高度为2.8 m,预留行人空间不应低于1.9 m,故行走机器人含吊装高度外,其运行空间高度不应超过0.9 m。因为高压电缆桥架之间的宽度为1.2 m,为保障测量距离,行走机器人两侧应预留不小于0.3 m的行走安全空间,所以其实际安装宽度不应超过0.6 m。行走机器人前后与隧道墙壁的距离受到隧道转弯的空间限制,会在后面给出分析,如图2所示。
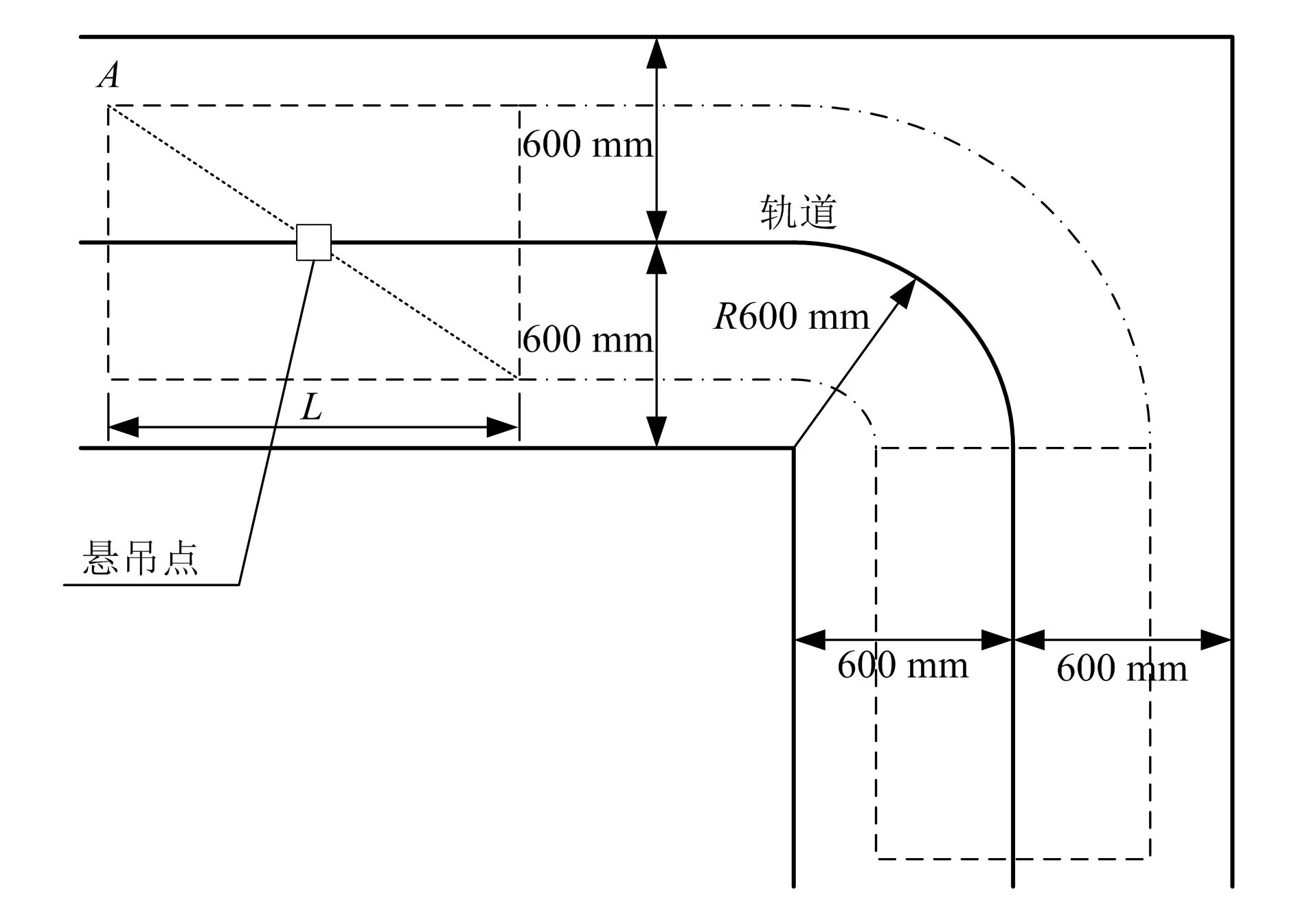
图2 轨道直角弯机器人过弯空间分析图
假定机器人长度为L,宽度为600 mm,悬吊点过弯时的半径为600 mm,且悬吊点位于机器人的几何中心处,那么A点扫过的距离即为机器人的最大扫过半径。根据三角学原理得到的A点的转弯半径解算图如图3所示。
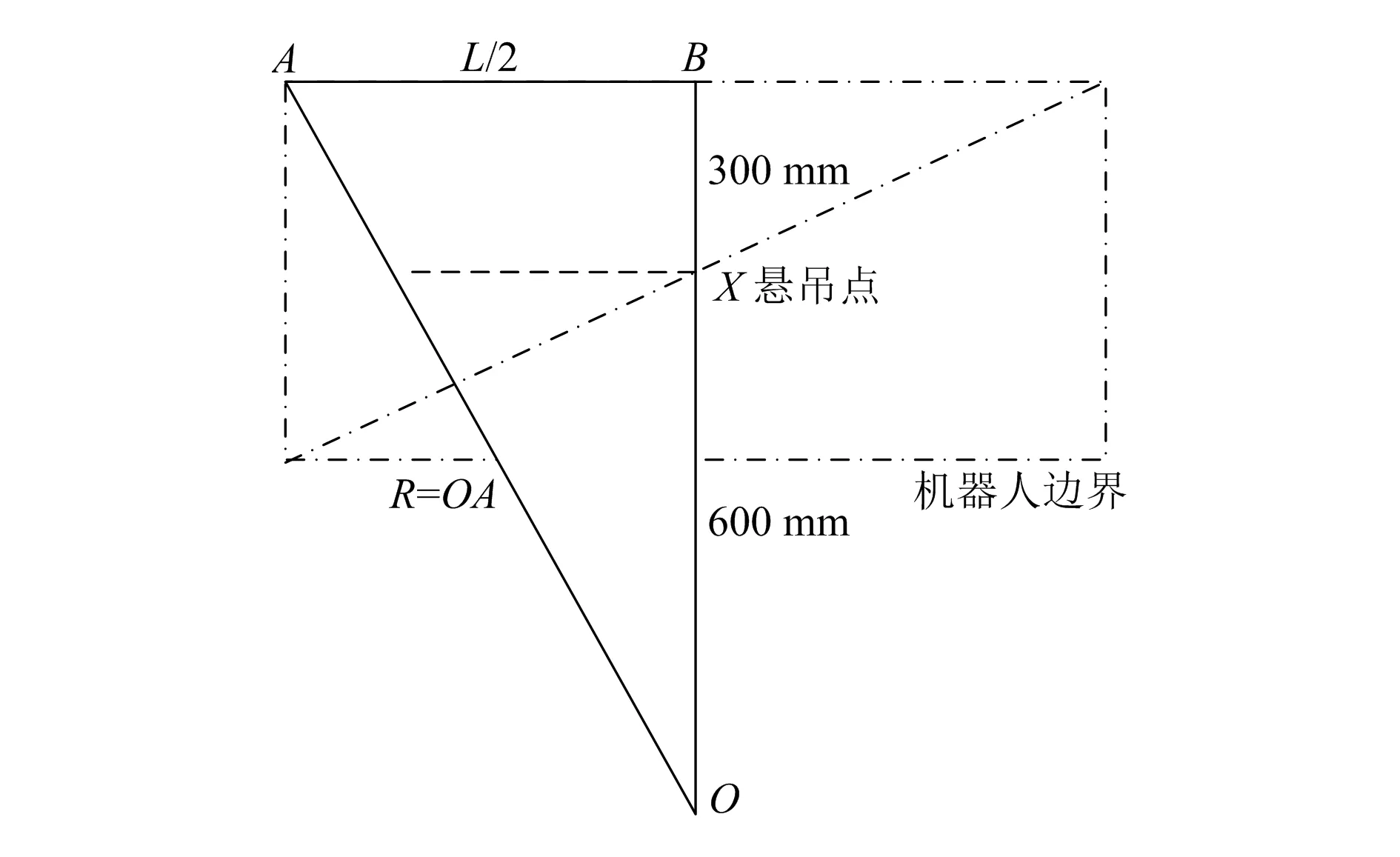
图3 机器人最大扫过半径解算图
由图3可知机器人总长度L应小于1 587.45 mm,本文机器人的实际长度按照1 200 mm进行设计,并把实际R值代入式(1),可得其最大转弯扫过半径为1 181.67 mm,大于最小扫过半径900 mm的余量为281.67 mm,因为本文预留了300 mm转弯余量,故该机器人通过富余量为18.33 mm。
综合上述分析可知,本文机器人的最大尺寸为L(长)×B(宽)×H(高)=1 200 mm×600 mm×900 mm。
2 机器人行走部设计
2.1 行走机构设计
根据传统的单轨吊稳定性导向的设计模式,该系统的单轨吊悬挂系统使用2对悬挂轮承载机器人的自重并维持悬挂的稳定性,使用1对导向轮控制机器人的行走方向稳定性。机器人距离隧道顶部预留一定空间,本文设计为28 mm,作为轨道安装距离,故设计理论高度为900 mm的机器人,可用高度被限定到872 mm。而悬挂支架两侧,还可以预留部分设备安装空间,此部分空间主要用于行走机构的安装和部分定位装置的安装,如图4所示。
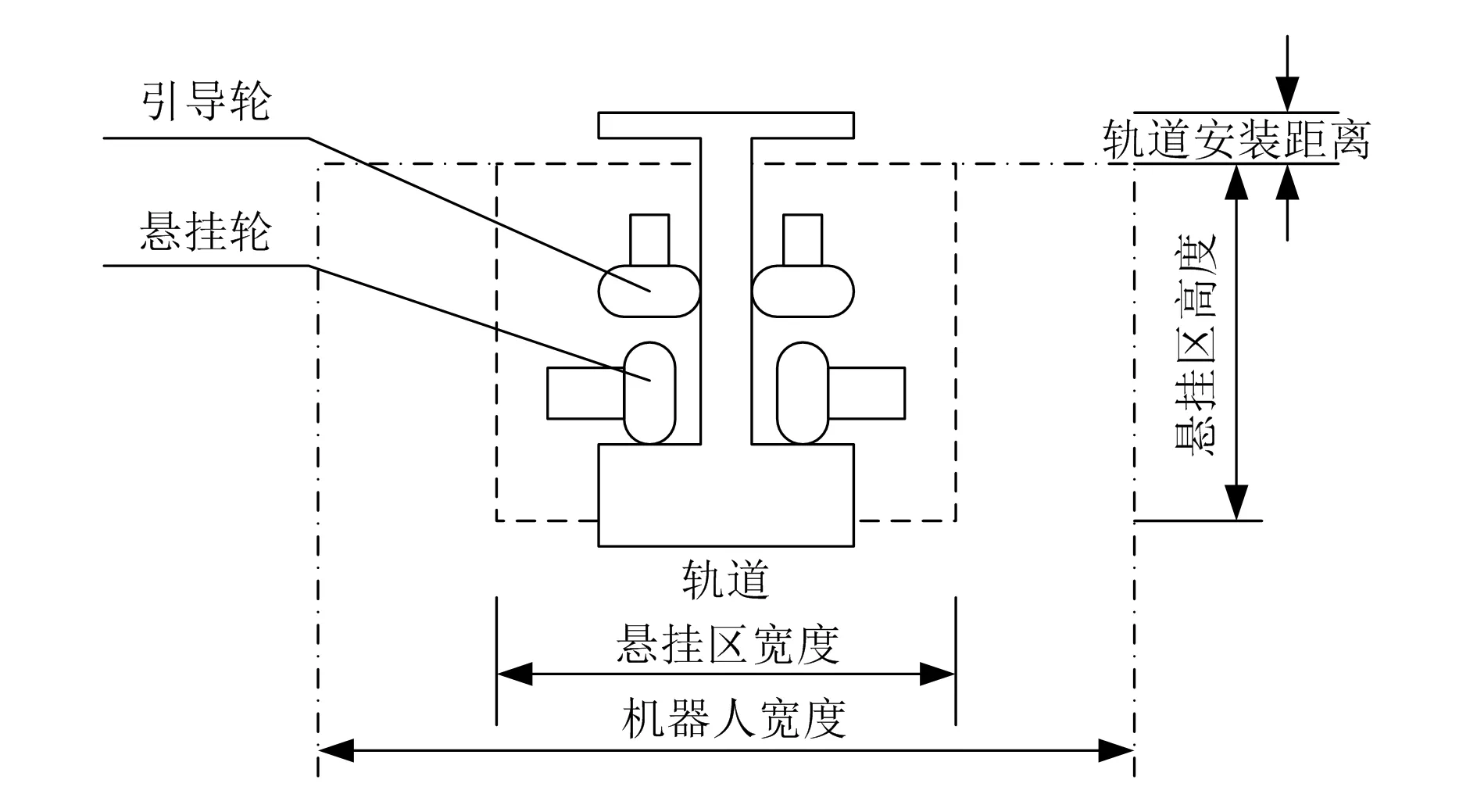
图4 行走机构悬挂机构图(纵向)
导轨中的齿轨部分栓接在悬挂导轨的底部,使用M5模数进行齿轨设计,步进电机与行走齿轮之间使用锥形连轴器连接,减速比为1∶1,行走步进电机占用部分机器人右侧空间,如图5所示。
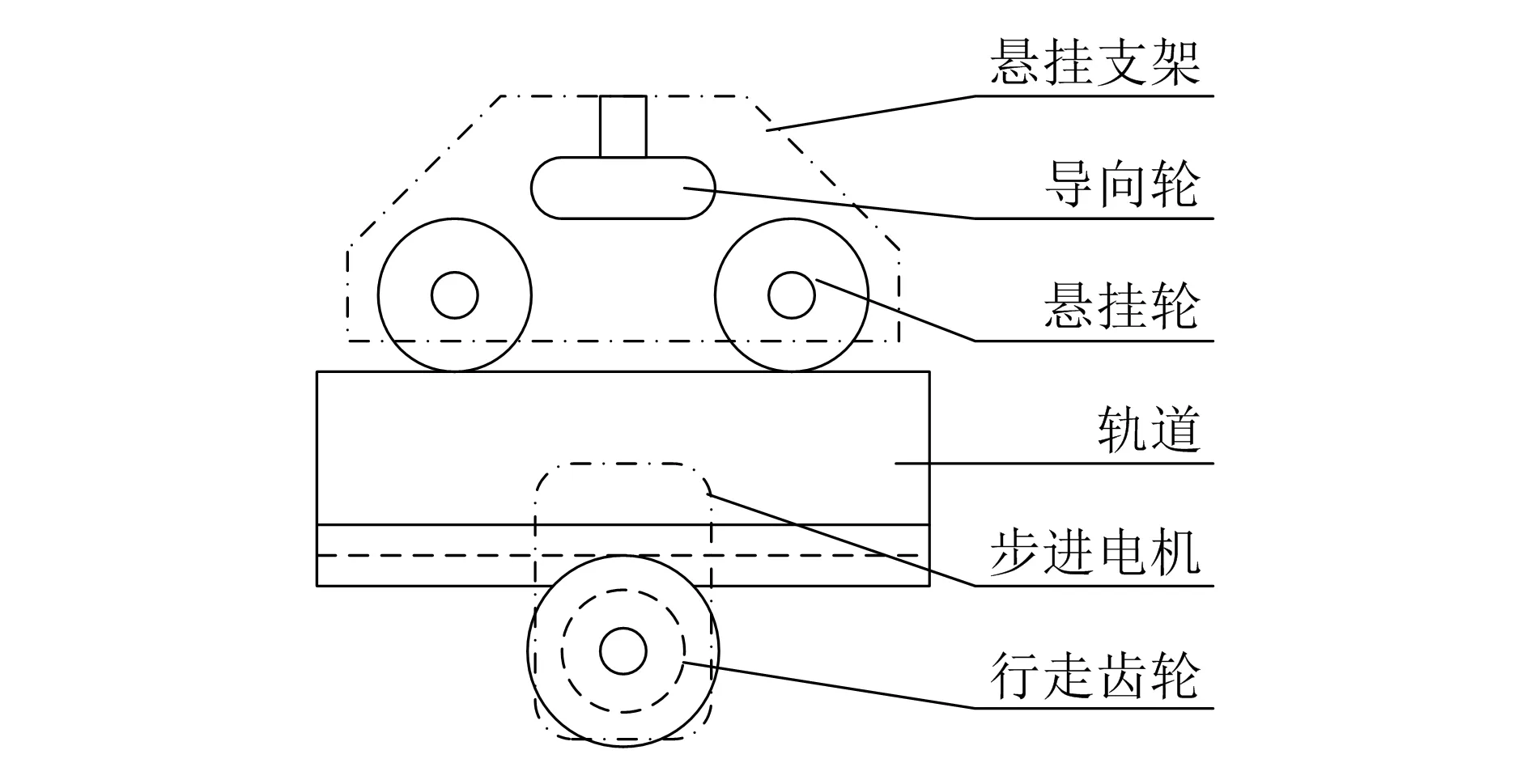
图5 行走齿轮及步进电机安装位置图
本文重点探讨齿轮驱动算法的仿真过程,机械设计的具体参数在此不做展开讨论。
2.2 行走动力设计
该系统的行走动力采用150 W24 V/36 V直流步进电动机驱动,电动机型号为TSM57-36V-10,电动机正反转各设置7级转速,该电机可支持24 V、36 V、48 V驱动模式,常规24 V模式下的调控模式详见表1。
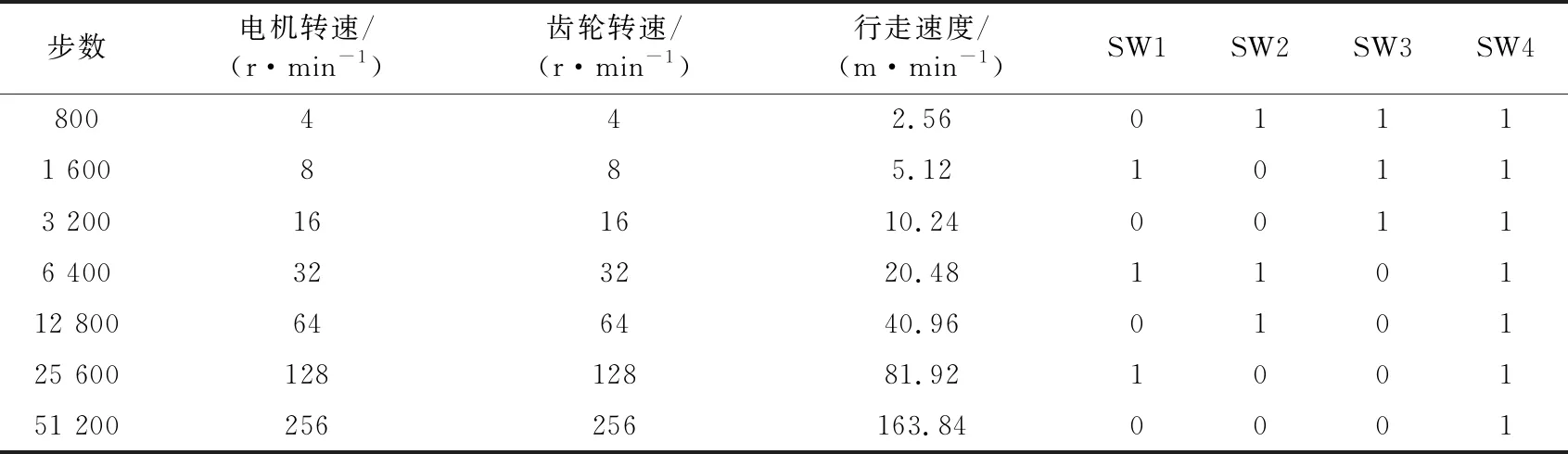
表1 步进电机(TSM57-36V-10)步数控制表
可见此模式下,系统可以实现2.56~163.84 m/min的行走速度,其中2.56 m/min速度可用于详细观察过程,20.48 m/min速度可用于常规巡线过程,163.84 m/min速度可用于非巡线调度过程。
本文隧道的长度为16.7 km,在非巡线调度中,机器人可以在101.93 min内跑完隧道全程,而常规巡线过程中,机器人可以在815.43 min(13.6 h)内完成一次常规巡线。实际部署中,按照每天巡线4次进行部署时,需要至少部署2台巡线机器人才可以满足巡线需求,假设考虑到机器人的检修维护过程,就需要采用4用2备的方式进行机器人部署。
2.3 行走控制设计
TSM57-36V-10步进电动机采用内置DSP控制器的方式进行驱动,故无需另外在嵌入系统内部署DSP模块,其DSP引脚数量为16个(含1个信号地),因此机器人如果采用单嵌入板系统,则嵌入板需要提供至少15个控制针对步进电动机提供控制信号。而其核心控制模块包括正反转2路信号和步数控制4路信号,本文后续算法设计中,重点就此控制信号进行讨论。
行走控制信号的主要数据来源详见表2。
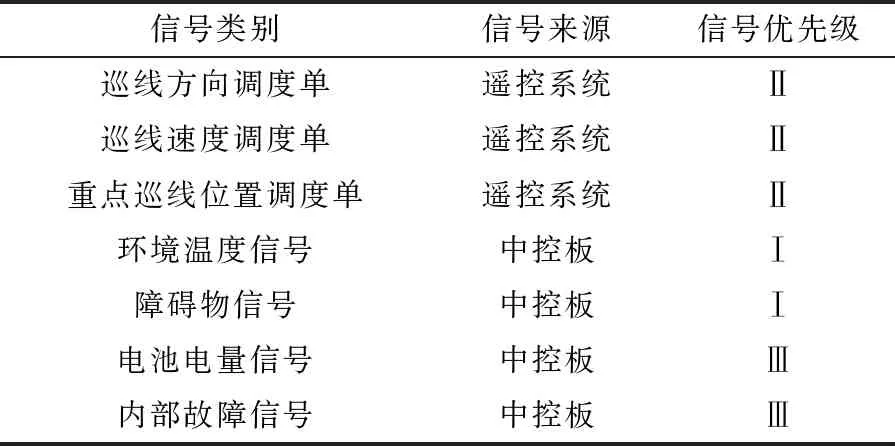
表2 控制信号来源及控制优先级
由表可见,该系统共设计3个信号为优先级信号,其中,来自调度遥控系统的巡线方向、巡线速度、重点巡线位置等信号,属于第Ⅱ优先级信号,该信号在与第Ⅰ级优先级信号不冲突的前提下得到执行。而巡线过程中发现区域环境温度过高时,及发现障碍物信号阻拦行走通道时,会执行第Ⅰ优先级响应,该执行过程为无条件执行,属于最高优先级。而当系统发现电池电量低或者出现其他内部故障时,则按照第Ⅲ优先级进行处理。上述决策过程均采用模糊控制矩阵的算法实现,展开论述详见下文。
3 行走部模糊控制算法
3.1 第Ⅰ优先级控制策略
首先,当系统发现行走前方障碍物占用机器人行走空间并阻挡其前进道路时,或轨道有不可通过现象时,会将系统停止到距离障碍点前5 m位置,同时向调度遥控系统发出请示,询问下一步控制策略,并将障碍点的可见光照片、红外照片及激光点云定位数据发送到调度遥控系统,供调度人员决策。调度人员可选择屏蔽该第Ⅰ优先级控制权并勒令系统强行通过,或派遣专人处理障碍物。隧道障碍物属于隧道故障的一种,充分捕捉障碍物信息是该隧道机器人的重要使命。
其次,当系统发现隧道内温度变化时,采用二维模糊矩阵的方式进行控制,详见表3。

表3 温度控制信号处理矩阵
A策略:该系统最大转速自行退回到温度小于120 ℃的安全范围内,退回的同时使用可见光、红外、激光点云等设施对现场进行观察拍照,抵达安全范围内时,系统停止行走,全面使用可见光、红外、激光点云等设施对现场进行观察拍照,同时触发调度系统声光报警,并将数据第一时间传回到调度系统中。
B策略:系统调整为机器人行走最低步数,缓慢通过故障区域,同时由可见光、红外、激光点云等设施对现场进行观察拍照,触发调度系统声光报警,并将数据第一时间传回到调度系统中。
C策略:系统依照调度遥控指令正常运行,但触发系统声光报警,同时将可见光、红外、激光点云数据传回。
D策略:系统依照调度遥控指令正常运行,不触发报警。
3.2 第Ⅱ及第Ⅲ优先级控制策略
第Ⅱ优先级策略为遥控策略,即调度通过远程遥控系统将巡线策略输入到机器人中,机器人根据第Ⅰ优先级数据和调度指令综合判断,选择巡线执行方式。该控制策略为顺序策略,并无典型的模糊矩阵影响策略执行。
第Ⅲ优先级策略为系统故障处理策略,主要来自系统故障和系统电源电量两种影响。当系统故障不影响系统行走时,向遥控系统报告故障码,并继续执行巡线策略;当系统故障影响到系统行走时,系统停止行走,向遥控系统报告系统故障码,等待维护人员救援。在电源电量不足的情况下,按照一维控制矩阵进行模糊判断,详见表4。
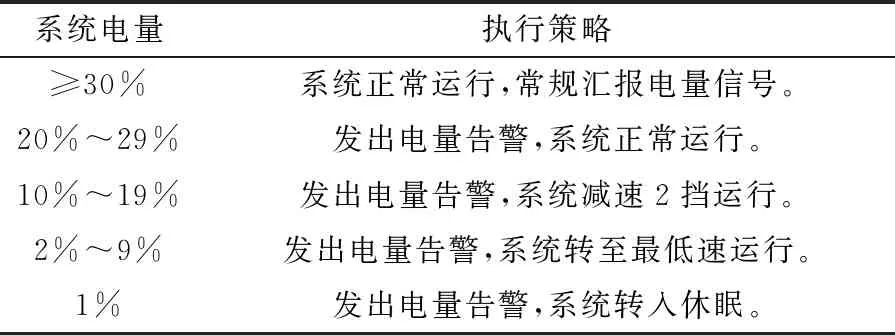
表4 系统电源电量模糊控制矩阵表
4 系统仿真与测试
4.1 系统行走速度测试
对系统的实际各个挡位行走速度进行测试,发现其速度偏差度为±2.3%,其行走速度与轨道平整度、轨道垂直倾角、系统内控制信号扰动有关。由前面论据基本断定,本文系统可基本满足行走速度设计需求。其实测图如图6所示。
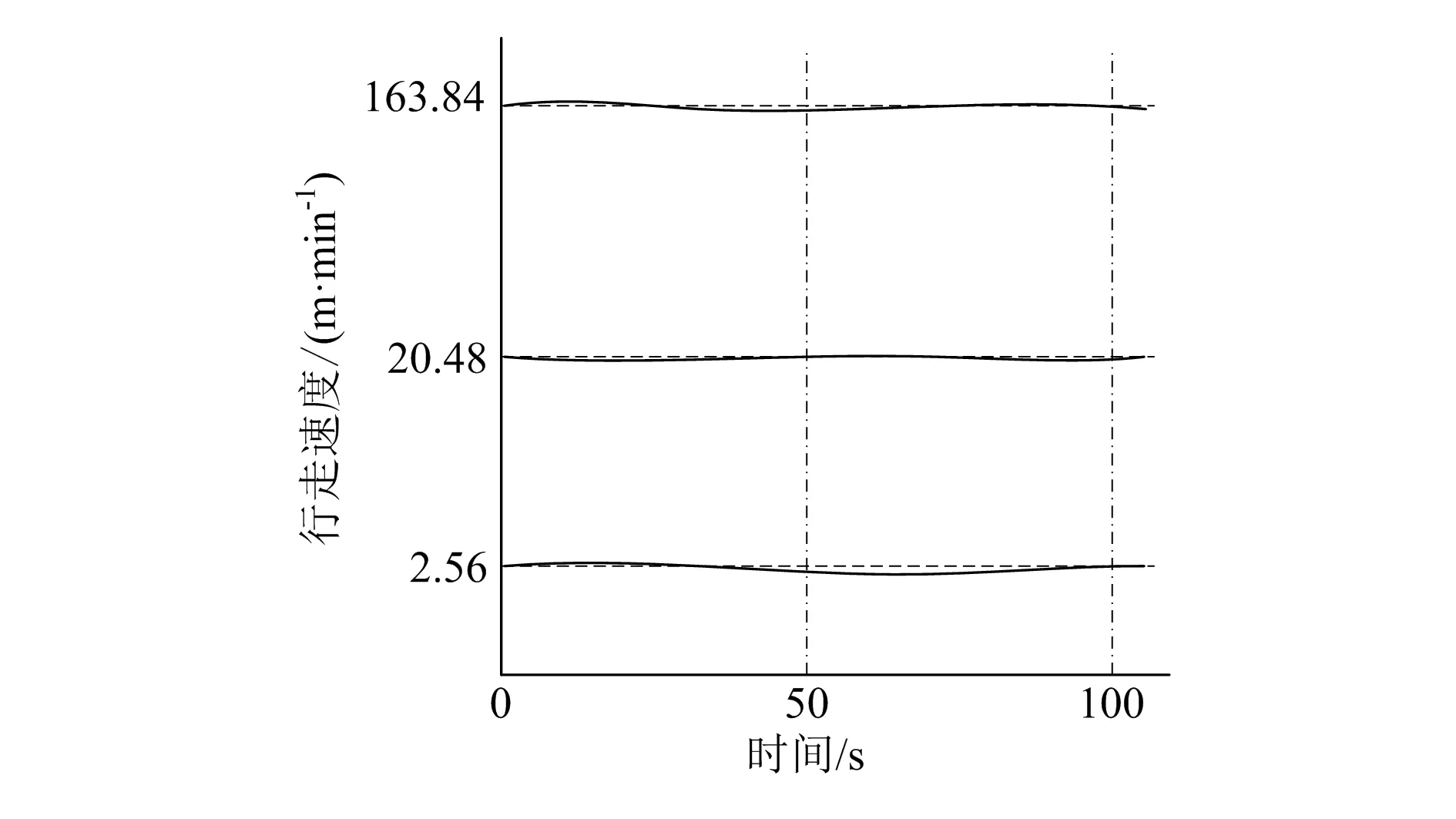
图6 3个常用位行走速度仿真实测图
4.2 系统速度反馈测试
不同巡航速度下的动能见表5。

表5 系统动能与速度关联表
本文考察3种测试状态,即A——从最高转速减速至0的状态,B——从最高转速转向为逆向最高转速的状态,C——从正常巡线速度(6 400步)减速至细致观察速度(800步)的状态。每种状态测试50次,并对测试结果进行统计,其转化结果见表6。

表6 系统变速反馈测试
由表可知,该系统在C状态可以完全保障安全运行,步进电机未产生接地电流或逆向电流,系统未测出升温,且状态转化可以在3~5 ms和2~4步完成。当系统高速空载运行并发现严重问题时,该状态被触发,此时步进电机可能出现最大0.03 A的接地电流或者逆向电流,系统可能产生最高0.50 ℃的升温,且转化时间略长,但系统完全可以抵抗此状态带来的焦耳效应,即在紧急状态发生时,该系统在C状态可以被作为应急策略。但在最极端的B状态下,系统可能产生395.2 J的焦耳效应,此时系统需要使用17~36 ms完成转向动作,可能最高产生5.7 ℃的升温,可见此状态会给系统带来一定程度的破坏。本文实际策略设计中,并未设计B状态的模糊控制策略,调度人员在实际调度过程中,也应该充分避免下达由此状态转化的指令。
5 结束语
本文从移动机器人行走结构的发展脉络出发,对移动机器人行走结构做了一个基本概括,介绍了电缆隧道巡检机器人在行走结构上的仿真研究。在科技创新时代,随着机器人技术的不断发展,移动机器人行走结构研究的目的是提升移动机器人在工业领域上的具体应用。基于运动仿真软件对移动机器人的行走结构进行研究,能够系统化、具体化地研究其工作原理,从而为日后采取不同行走结构的机器人提供选取的依据。在本文对移动机器人的行走结构进行分析研究的过程中,着重对履带式行走结构进行了研究,发掘出其所具备的各种优势,从而能够在对电缆隧道巡检的工作过程中,发挥其最大的优势。
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
中国电业与能源(2021年4期)2021-05-22 00:39:42
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
广西电业(2020年11期)2020-03-23 07:14:14
趣味(数学)(2019年12期)2019-04-13 00:28:48
无人机(2018年1期)2018-07-05 09:51:06
中国科技信息(2016年6期)2016-08-31 07:27:10
中国科技信息(2015年23期)2015-11-07 08:25:56
电测与仪表(2015年3期)2015-04-09 11:37:48
