
基于三维探地雷达的沥青路面层间接触状态智能诊断技术
2022-06-12 06:08王大为吕浩天汤伏蛟叶呈森刘鹏飞
北京工业大学学报 2022年6期
王大为, 吕浩天, 汤伏蛟, 叶呈森, 刘鹏飞
(1.哈尔滨工业大学交通科学与工程学院, 哈尔滨 150090;2.德国亚琛大学道路工程研究所, 亚琛 52074, 德国)
随着我国交通强国战略的稳步推进,道路基础设施建设非常迅速,公路建设里程持续增长,截止至2020年全国公路总里程达到519.81万km,公路密度为0.541 5 km/km2. 与此同时,我国的交通量和重载超载车辆的比例也与日俱增,路面结构承受了更多的荷载次数和更高的荷载水平,导致路面平整度下降,路面疲劳损伤显著加剧[1],最终造成各类路面病害. 根据公路病害成因分析,各结构层之间的接触状态不良是导致道路损害的主要原因之一[2]. 路面结构层间接触状态的衰减会使各结构层的应力、应变发生变化,当层间接触不良时,道路结构在荷载作用下面层底部会由受压状态变为受拉状态,极大增加发生反射裂缝的可能性[3-6];利用有限元软件建模分析可知,当层间接触状态由完全连续变化到完全滑动时,路面结构的力学性能明显减弱,沥青层底弯拉应力涨幅超过500%,沥青层底拉应力涨幅超过100%,路面的使用寿命降低了约40%[7-10]. 因此,研究路面结构层之间的接触状态具有重大意义.
影响沥青路面层间接触状态的因素可分为内因和外因. 内因指道路材料自身特性,例如沥青和集料自身强度、沥青混合料结构参数未达到工程标准,造成路面结构整体性下降,削弱路面整体抗力;外因指外界荷载、环境因素和施工质量等,例如因压实度不足、路面温度和湿度变化造成层间黏结不足,在车辆荷载的作用下易发生层间剪切滑移,造成路面严重破坏.
剪切、拉拔、扭剪等室内试验为传统路面层间接触状态评价方法[11]. 彭国强等[12]采用拉拔试验研究了温度、沥青针入度、沥青种类对层间黏结性能的影响. 徐世法等[13]利用剪切试验和拉拔试验对乳化沥青、改性乳化沥青、SBS改性沥青、橡胶沥青以及橡胶SBS沥青5种黏结材料的层间黏结性能进行了评价,研究结果表明橡胶SBS复合改性沥青黏结性能最为优越. 刘红坡等[14]采用剪切- 拉拔试验测试了不同温度、水平推力和黏结层油用量对沥青路面层间黏结强度的影响. 以上层间黏结性能评价方法大多在实验室内进行,缺少实际工程现场验证过程,与实际道路受力、受损情况存在一定差异.
近年来,随着无损检测技术的发展,探地雷达技术在国内外发展迅速,规模不断扩大,在雷达硬件设备、地下目标识别、地下目标成像等方面取得了重大进展和突破,目前国内外规模较大的路用探地雷达生产公司如表1所示. 探地雷达在道路工程领域得到了广泛的应用,并且取得了良好的应用效果. Sudyka等[15]利用空气耦合探地雷达在干燥和潮湿条件下探测出沥青路面内部几mm宽的水平裂缝,证实了探地雷达技术评价沥青路面层间黏结状态的可行性. 虞将苗等[16]基于探地雷达技术,应用厚度补偿原理对沥青路面厚度进行了检测,研究结果表明,该测试方法稳定可靠且可操作性强,具有较大的工程实用价值. Zhang等[17]将探地雷达信号和人工神经网络相结合,快速诊断沥青路面内部水损害,准确率超过90%.

表1 国内外主要路用探地雷达生产公司
因此,基于电磁波发射- 接收技术的探地雷达检测方法为道路内部病害检测提供了一种高速、便捷的无损检测手段. 然而,目前仍缺乏探地雷达方法对道路结构层间接触状况的研究. 本文基于三维探地雷达关键技术,结合具体工程项目,提出沥青路面层间接触状态判别原理与方法并对具体工程检测结果进行层间接触状态评价,可为沥青路面养护和维修提供参考.
1 三维探地雷达系统及工作原理
探地雷达(ground penetrating radar,GPR)是一种无损检测设备,它通过分析电磁波的传播过程来获取被测物体的相关信息,电磁波的传播过程与材料的介电常数密切相关. 由于不同材料介电常数的差异,电磁波在穿过不同材料的过程中相位和振幅会发生变化,GPR通过电磁波相位和振幅的变化来识别被测目标的信息.
材料介电常数的差异是GPR的应用基础. GPR发射的高频电磁波在不同介电常数的材料中形成反射电磁波,然后探地雷达对反射电磁波进行处理,从而获得道路结构信息. 因此,为了提高GPR探测结果分析的准确性,有必要掌握不同材料的介电常数值,分析电磁波在不同材料中的传播规律.
电磁波振幅的变化规律应遵循反射系数公式.如果ε1<ε2,则反射系数为负,反射波的极性与入射波的极性相反;如果ε1>ε2,则反射系数为正,反射波的极性与入射波的极性相同.ε1和ε2差异越大,反射波振幅越大.
(1)
式中:R为反射系数;ε1和ε2为材料的相对介电常数.
GPR工作原理如图1所示,其中T为电磁波发射器、R为电磁波接收器、A-scan为单通道波形图、B-scan为二维剖面图、C-scan为多个二维剖面图共同形成的三维图[18]. A-scan图中出现的异常振幅即为由介电常数差异反映的不规则雷达反射图谱. 三维GPR天线发射频率一般在50 MHz~3.5 GHz,高频天线适用于浅部探测且精度较高,低频天线适用于深部探测且精度较高频天线低,进行路面结构层探测时,宜选择高频天线,在进行路基空洞检测时低频天线具有更大优势.

图1 GPR工作原理图Fig.1 Working mechanism for GPR
本文所使用的三维GPR系统由GeoScopeTM MK IV雷达主机和DX2125型阵列天线组成,如图2所示. GeoScopeTM MK IV雷达主机采用数字步进频率技术,它发射一系列具有一定阶跃频率的正弦波,并在频域接收相应的原始数据,如图3所示. DX2125阵列天线共有25个扫描通道,其连续频率范围可达200 MHz~3 GHz,与传统GPR系统相比,具有浅层分辨率高、探测深度大等特点.

图2 三维GPR检测设备Fig.2 3D GPR equipment
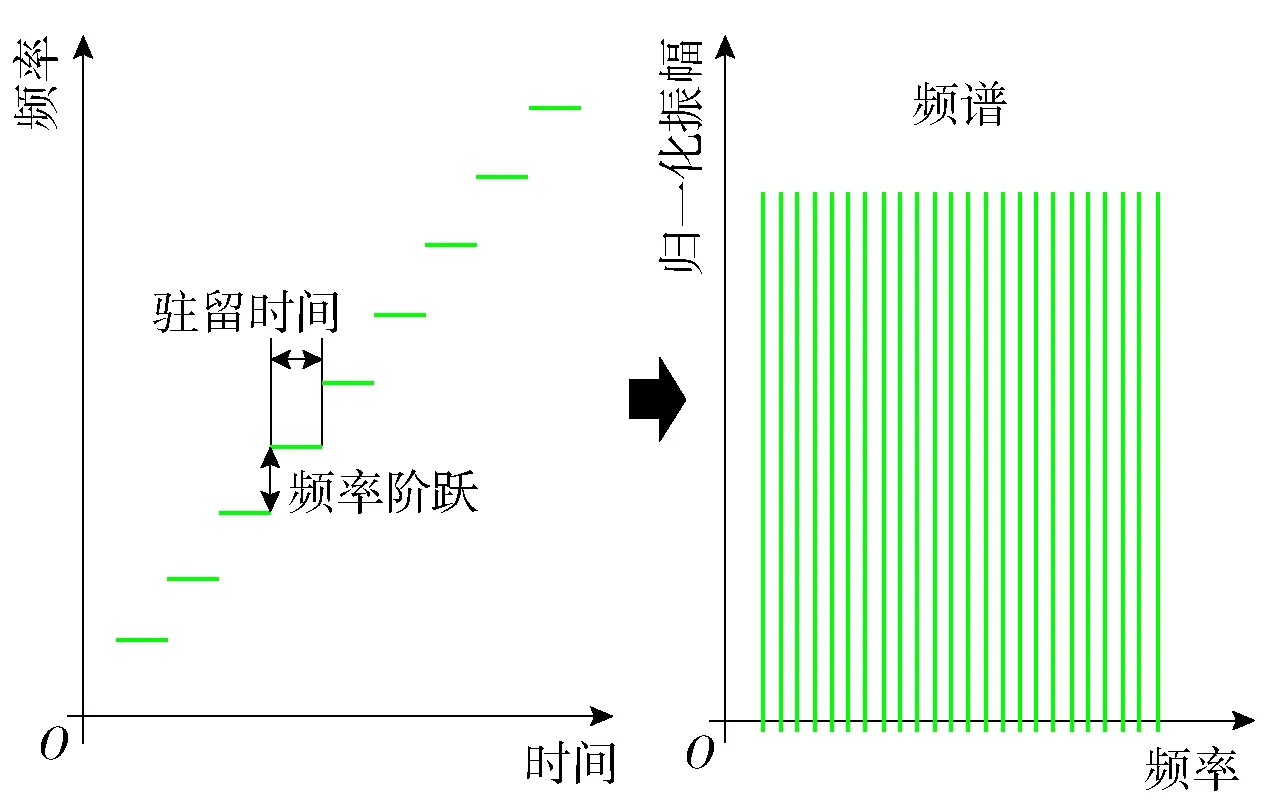
图3 步进频率脉冲示意图Fig.3 Schematic diagram of stepped frequency pulse waveform
2 试验与方法
2.1 项目概况与雷达检测方案
本文检测的改扩建工程项目为双向四车道一级公路,设计速度为80 km/h,路基宽度为25.50 m. 整体式横断面布置为:行车道4×3.75 m,中央分隔带2.00 m,左侧路缘带2×0.50 m,硬路肩2×3.00 m,土路肩2×0.75 m. 该公路服役使用2年后出现了较为严重的翻浆冒泥、剥落、路表横缝和纵缝等路面早期破坏. 本文检测了17.2 km全幅道路层间接触的状况,路面结构如图4所示. 对左幅、右幅沥青路面的超车道、行车道和应急车道分别进行三维雷达检测,测道布置,如图5所示.

图4 路面结构示意图Fig.4 Schematic diagram of pavement structure

图5 测道布置方案Fig.5 Detection plan layout
2.2 GPR数据采集方法
三维GPR天线阵列是实现数据采集的核心部件,本文采用的三维雷达发射- 接收天线结构如图6所示,阵列包含13对发射- 接收天线,每一个发射天线都与相邻的2个接收天线配对,从而形成25个探测点,每个通道的间距为7.5 cm,因此一次扫描可以覆盖187.5 cm的宽度.

图6 三维探地雷达天线阵列结构Fig.6 Antenna layout of 3D GPR
2.3 GPR数据处理方法
GPR数据采集过程会受到如移动通信基站等附近信号源的电磁干扰,因此采用干扰抑制方法识别并消除外部信号源的干扰,即
(2)
式中:D(fm)为步进频率fm的频域信号;等式右边第1项为目标信号;第2项为干扰信号.当步进信号fm与干扰信号fk相差超过所设阈值时,干扰信号将会被消去.
经过天线阵列采集到的雷达原始数据为频域数据,需要进行逆选择性离散傅里叶变换将频域数据转换为时域数据[19],有
(3)
式中:xn表示相对时域序列;Xk表示频域中的N个样本的序列;Ln表示给定时域指数n下,矩阵H的最后一个非零元素的频域指数.
GPR信号的功率与距离的平方成正比,因此功率很大的浅层反射信号会极大地干扰功率很小的深层反射信号形成背景噪声,严重干扰雷达图像识别,可以采用背景滤波方法减少背景噪声.本文通过均值法进行背景滤波,假设B-scan数据X是一个M×N的二维矩阵,x(i,j)表示第i行第j列元素,均值法具体公式为

(4)

2.4 层间接触状态评价方法
一对雷达收发天线在某一测点采集到的数据为反射信号沿时间变化的振幅曲线,这类曲线称为同相轴或A-scan图. 测点数据沿行车方向排列,将同相轴振幅强弱用灰度大小表示,形成行车方向与深度方向的B-scan图. 由于沥青路面为层状结构,每层材料的相对介电常数值不同,同相轴在层位交界处会产生振幅峰值,并且沿行车方向具有高度连续性,典型的层间接触状态良好的GPR特征图谱如图7所示. 为了准确识别层间接触失效,必须熟练掌握路面层间雷达图像的同相轴特点. 层间接触失效的GPR图像主要表现为:同相轴振幅明显增强,且加强的同相轴仅仅在水平方向有影响范围,在深度方向影响很小. 图8给出了典型的层间黏结失效的特征图谱. 可以看出,雷达图像中面层与基层之间有以正起跳为主的加强同相轴,且在深度方向影响较少. 综上所述,本文基于三维GPR数据,提取路面沥青层与基层之间的同相轴振幅,分析得到全幅路面层位界面扫描图,依据沥青路面层位界面同相轴振幅强度评价层间接触状态:同相轴振幅越大,层间接触状态越差;同相轴振幅越小,层间接触状态越好.

图7 层间黏结良好的GPR图谱Fig.7 GPR results with good interlayer contact

图8 层间黏结失效的GPR图谱Fig.8 GPR results with bad interlayer contact
3 结果与讨论
3.1 层间接触状态分析
根据2.4可知,两接触层材料相对介电常数差值越大,界面振幅强度峰值越大,层间接触状态越差. 将每条检测车道划分为1.57 m×0.95 m大小的网格,每个网格内的反射波振幅强度平均值作为该网格振幅强度代表值,每条车道振幅强度代表值约9 600个. 表2列出了每条检测车道层间界面振幅强度值的统计结果. 由表2可知,左幅、右幅应急车道层间界面振幅平均值与同侧道路其他车道相比较大,说明应急车道层间接触状态整体较差;同一车道层间振幅强度的最大值和最小值相差约30倍,说明同一车道不同区域的层间接触状态相差显著.
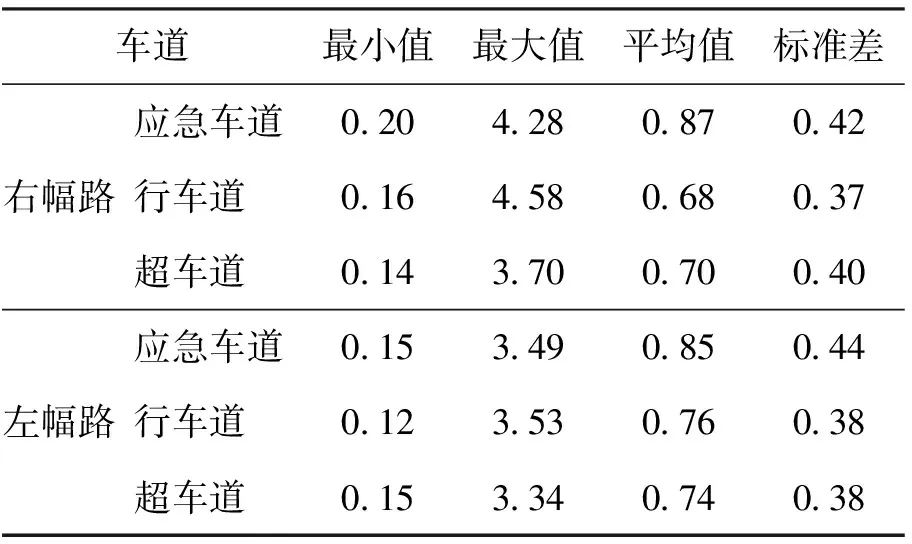
表2 层间界面振幅强度值统计结果
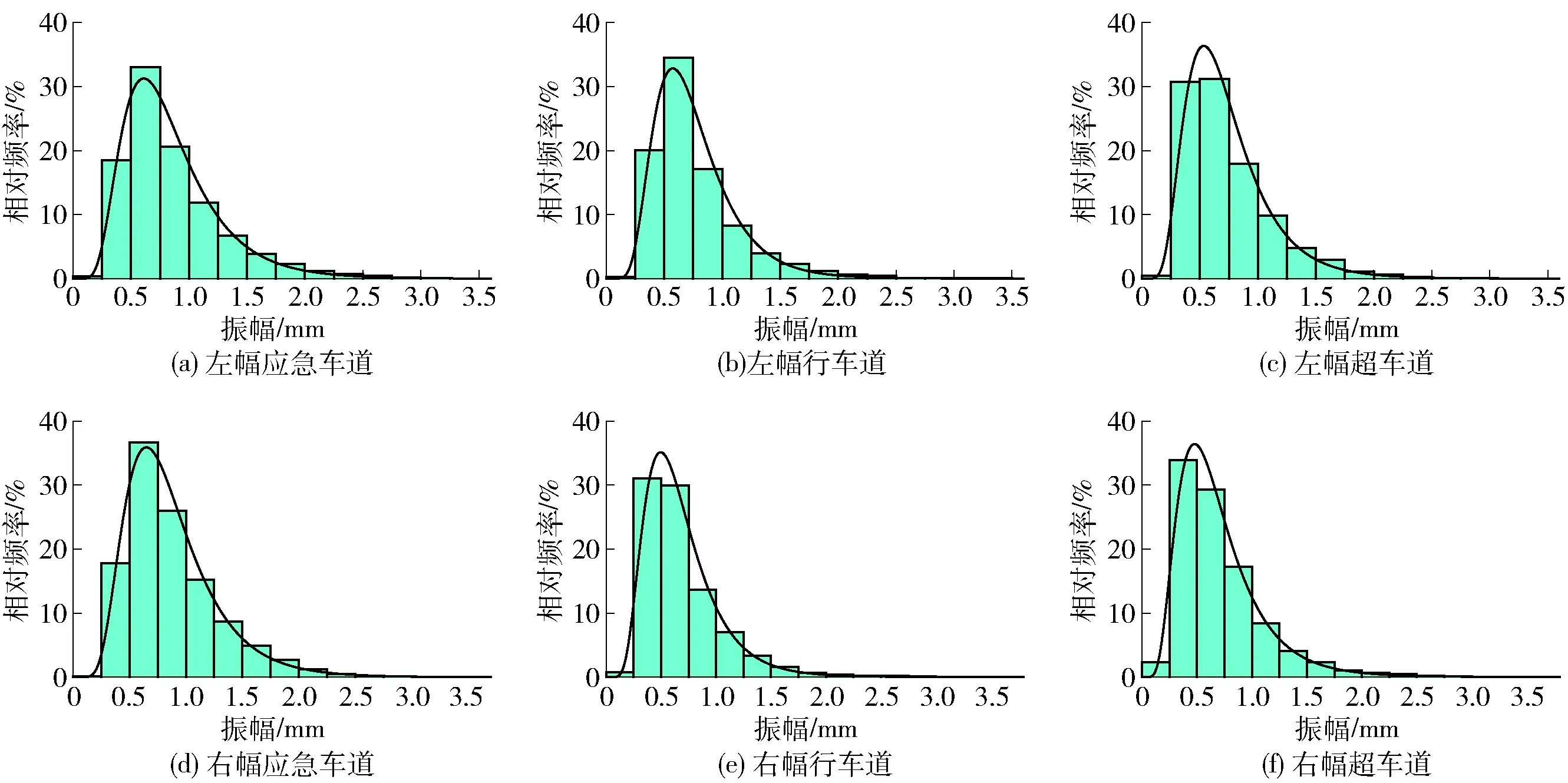
图9 各振幅区间的频率Fig.9 Frequency distribution with amplitude interval
由于振幅强度值的分布范围较广,因此根据振幅分布范围划分了若干个振幅区间,并计算了各区间振幅的频率,如图9所示. 可知,无论是右幅、左幅任意车道,层间界面振幅均服从对数正态分布;区间(0.25 mm, 1.00 mm)内振幅频率最大,累计相对频率均大于70%. 左幅超车道为左侧道路层间接触状况最好车道,区间(0 mm, 0.50 mm)内相对频率最高;右幅行车道为右侧道路层间接触状况最好车道,区间(0 mm, 0.50 mm)内相对频率最高.
关昌余等[20]根据层间黏结系数的大小将沥青路面结构层间接触状态分为层间接触良好、层间接触一般、层间接触较差3个状态. 基于此,本文将层间界面振幅的分布范围划分成3个区间,分别为(0 mm, 1 mm)、(1 mm, 2 mm)、大于2 mm,并以此为依据对层间接触状况进行判断. 图10统计了上述3个振幅区间的频率. 可知,当层间振幅小于1 mm时,应急车道振幅的频率为70%左右,行车道和超车道振幅的频率为80%左右,说明行车道和超车道的层间结合情况比应急车道好;振幅大于2 mm时,各车道累计相对频率不超过3%. 公路建成后,各车道的材料特性相同,并且受到的环境作用相同,所以3条车道的层间接触状态差异主要由荷载状况和施工质量决定. 现场进行雷达检测时发现,行车道和超车道的交通量远远大于应急车道的交通量,受到的荷载水平较大,荷载作用次数较多,这2条车道的层间接触状态却优于应急车道.
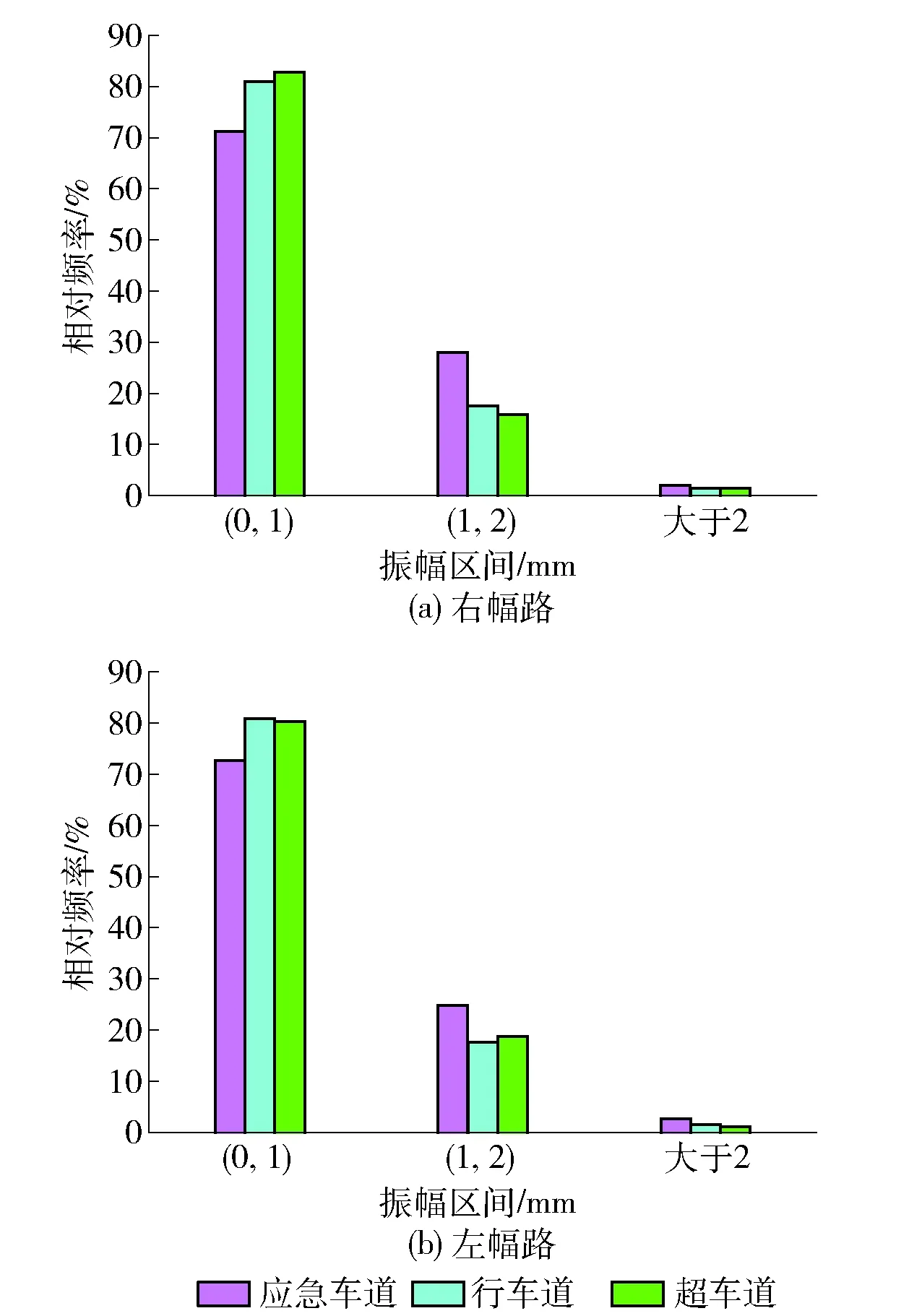
图10 各振幅区间的频率Fig.10 Frequency distribution with amplitude interval
3.2 层间接触状态衰退规律分析
沥青路面不同区域受到的车辆荷载- 温度影响状况不同,所以在荷载- 温度耦合作用下,路面不同区域会表现出不同的层间接触状态. 环境温度过高或过低都会降低层间黏结材料的黏结强度,并且温度越低,黏结强度衰减越明显[7];荷载水平增加时,沥青层层底拉应力、应变将显著增大,表现为明显的非线性变化趋势;高温、重载情况时,非线性现象更加明显[4],极大地加速层间黏结强度衰减. 荷载- 温度影响显著的区域层间接触状态较差,振幅值较大;荷载- 温度影响较小的区域层间接触状态较好,振幅值较小. 综上所述,沥青路面长期在车辆荷载反复作用和环境因素的耦合作用下,层间接触状态由强变弱的速率呈现先慢后快的趋势.
为了研究层间接触状态衰退规律,本文将每条车道约19 000个层间振幅代表值按照振幅值大小进行排序,并绘制了相应的曲线图,结果如图11所示. 可以看出,各条车道的层间振幅值变化规律一致,且应急车道振幅值较其余2条车道大.

图11 层间振幅变化规律Fig.11 Amplitude variation of contact layers for the three lanes
4 结论
本文基于三维GPR技术提出了沥青路面层间接触状态评价原理和方法,并分析了某改扩建道路的层间接触状态.
1) 层间接触不良在雷达图像中主要表现为层间连接处出现强反射,连接处波形振幅较大. 因此,利用层间界面反射波振幅可以较好地描述沥青路面层间接触状态.
2) 各车道层间界面振幅均服从对数正态分布. 当层间振幅小于1 mm时,应急车道振幅的频率为70%左右,行车道和超车道振幅的频率为80%左右,说明行车道和超车道的层间结合情况较应急车道好.
3) 当沥青路面层间接触状态衰减到一定程度后,在车辆荷载作用下,路面结构层内部应力应变响应显著.
4) 应当在层间接触状态一般时及时跟进预防性道路养护处治措施,最大程度延长道路使用寿命.
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
科学技术创新(2022年29期)2022-10-26
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
学生导报·东方少年(2019年20期)2019-11-27
振动工程学报(2019年2期)2019-05-13
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年18期)2016-10-11
股市动态分析(2016年4期)2016-09-29
