
基于时频峰值的光纤陀螺仪信号滤波算法
2022-06-10 11:13李晨曦李国进
装备制造技术 2022年1期
李晨曦,李国进
(广西大学 电气工程学院,广西 南宁 530004)
0 引言
光纤陀螺仪是基于萨格奈克效应的角速度测量装置,是现代航空、航海、航天和国防工业中广泛使用的一种惯性导航仪器。在实际工作中,由于噪声存在,给测量带来较大的误差。为了滤除噪声,提高精度,研究学者提出了大量的算法,主要算法有卡尔曼滤波[1]、小波滤波[2]、相关向量机[3]、神经网络滤波[4]等。由于光纤陀螺仪的输出并不总是平稳信号,以上算法对进行滤波都存在一定的缺陷。对于非平稳信号而言,瞬时频率描述其频率随时间变化的特性,再加上随机噪声的频率对有用信号的瞬时频率影响不大,可以通过估计含噪信号的瞬时频率来恢复有效信号。在频率估计时,采用伪Wigner Ville分布(Pseudo Wigner Ville Distribution,PWVD算法),对信号进行分析,得出的信号能量在瞬时频率处最为集中,因此可通过取PWVD峰值来估计瞬时频率从而恢复有效信号。
1 时变窗长时频峰值滤波算法
1.1 时频峰值滤波原理
时频峰值滤波(Time-frequency peak filtering,TFPF)算法[5]是由B.Boashash和M.Mesbah两位学者提出的一种基于时频分析理论的随机信号滤波算法。它把含噪信号编码调制为解析信号,采用PWVD算法进行瞬时频率估计,通过求取时频峰值来估计有效信号。对于含噪信对于含噪信号s(t),信号的解析z(t)为:

采用PWVD算法对其进行频率估计,得到:

式(2)中,f是频率,h(λ)是窗函数。取其峰值估计得到瞬时频率:

1.2 时变窗长时频峰值滤波的窗长获取
基于PWVD的TFPF算法的窗函数h(λ)是固定的,导致滤波后的信号仍存在很大的误差。因此,窗函数的窗长如何选择以达到最优的滤波效果就成了关键,为此,本研究采用了一种时变窗长的时频峰值滤波(Time-varying window TFPF,TVWTFPF)算法[6]。
TVWTFPF算法的窗口长度采用数据驱动的方式获得。当窗长为h,时刻为t时,估计的误差定义为:

式(4)中,ω(t)表示准确的瞬时频率值。当瞬时频率的误差比较小时,误差可以表示为一个确定分量和随机分量的和,即:

式(5)中,σh是窗长为h的的标准方差,对于矩形窗来说,可以表示为:

其中,σ2ε为噪声方差,A为信号幅度,T为采样周期,h为窗长;κ为标准高斯分布的分数位。
当选择小窗长时,确定分量可表示为:

则式(5)可表示为:

从式(8)可以看出,瞬时频率的精确值ω(t)位于一个置信区间内DK(t),表示为:

因为相邻窗长间置信度的高低代表了时频峰值出现概率的大小,对于一个递增的窗长序列H={h1<h2<h3<…<hJ},当满足下面的两个准则时,取为该时刻的最优窗长。
准则1:若h满足H中Dk-1(t)和Dk(t)有重合点Dk(t)∩Dk-1(t)≠Ø即Dk-1(t)-Lk(t)>0的最大窗长时,初步将h作为该时刻的最优窗长h*,如图1所示的h*=7。

图1 置信区间交叉准则窗长选择
准则2:在准则1的基础上,考虑Dk-1(t)和Dk(t)重叠部分与Dk(t)的关系:

Ok(t)的取值如下:
1)当Dk(t)⊂Dk-1(t),Ok(t)=1;
2)当Dk(t)∩Dk-1(t)≠Ø时,Ok(t)=0;
3)其他情况下,Ok(t)∈(0,1)。
如窗长为h2时,D2(t)是D1(t)的子集,所以O2(t)=1;当窗长为h3时,O2(t)=0.95。设定一个阀值Otr,当窗长hk满足Ok(t)>Otr,且是其中的最大窗长时,hk为最优窗长,见图1的h*=3。结合准则1和准则2,得出该时刻的最优窗长为3。
1.3 TVWTFPF算法实现
通过以上分析,采用置信区间交叉准则来获得最优窗长,从而估计得到瞬时频率。TWVTFPF算法具体步骤如下:
步骤1:通过式(1)将含噪信号编码为解析信号;
步骤2:通过式(3)依次求出中每个窗长所对应的瞬时频率估计值;
步骤3:通过式(9)求出该瞬时频率对应的置信区间;
步骤4:当置信区间满足准则1和准则2时,求得该时刻的最优窗长h*;
步骤5:取出在最优窗长h*下所对应的瞬时频率值,最后估计得到有效信号。
2 实验与结果分析
2.1 实验平台
本实验采用MK60DN512ZVLQ10(以下简称:MK60)单片机实时读取数字三轴光纤陀螺仪ITG3200的数据,发送到计算机进行滤波处理后实时显示。ITG3200芯片内含A/D转换器,直接输出角速度数字信号,便于MK60读取。
2.2 静态实验
在静止状态下,陀螺仪水平放置,其三轴的角速度输出均为零,设置采样频率为150 Hz。待陀螺仪信号输出稳定后,分别采样陀螺仪X、Y、Z三轴的信号,用固定窗长的时频峰值滤波算法(以下简称:TFPF)、小波基sym6最大最小值阀值滤波算法(以下简称:sym6)和TVWTFPF的滤波,陀螺仪Y轴输出信号的效果如图2(a)(b)(c)(d)所示。

图2 陀螺仪Y轴输出信号效果
为了更能准确地比较滤波算法的优劣,分别采用均值、方差和信噪比三个指标来衡量滤波的效果,其计算公式分别为:


其中Ps是原始信号的功率,Pn是含噪信号的功率。滤波前后数据如表1所示。从表中可以看出,采用TVWTFPF算法Y轴的均值比前两种滤波有所下降。Y轴信号的方差远远小于原始信号,较TFPF滤波和sym6滤波后的信号分别降低了51.5%和50.8%,信噪比分别提高了4 dB和3 dB。相应的X、Z轴信号信噪比较其他两种滤波大约改善3~6 dB。

表1 静止光纤陀螺仪Y轴信号滤波前后性能比较
此外,还对光纤陀螺仪Y轴输出信号Allan方差系数进行了分析,其中量化噪声、角随机游走噪声、偏差不稳定性噪声、速率随机游走噪声、速率斜坡噪声的计算公式如下:

式中Cn(n=1,2,3,4,5)代表的是在最小均方意义下Allan拟合函数下的各个系数。分析结果如表2。

表2 静止光纤陀螺仪滤波前后Y轴输出信号Allan方差系数
从表2可以看出,量化噪声和速率随机游走噪声是影响此光纤陀螺仪信号的主要因素。通过比较三种滤波算法可以得出,TFPF滤波算法减小了量化噪声和速率斜坡噪声,但同时又引进了角随机游走噪声和速率随机游走噪声;sym6滤波算法减小了量化噪声和速率斜坡噪声的影响,但在一定程度上又引入了角随机游走噪声,而采用TVWTFPF算法减少了原始信号的量化噪声、角随机游走噪声、偏差不稳定噪声、速率随机游走噪声和速率斜坡噪声,仅引入了少量的速率随机游走噪声,其滤波远远优于TFPF滤波和sym6滤波,大大提高了光纤陀螺仪的精度。
2.3 动态实验
为了更准确地表现本研究所用算法的性能,动态实验把光纤陀螺仪固定在匀速转台上,转台由MK60单片机驱动并设置转速。转台从静止开始慢慢带动陀螺仪达到10 deg/s的速度,保持此速度匀速旋转一段时间后速度缓慢地变为零,采样频率是150 Hz。实验结果如图3所示,其中0~160 s是陀螺仪缓慢加速时间,160~360 s是陀螺仪保持10 deg/s匀速旋转时间,360~560 s是缓慢减速时间。由图3可以看出,TVWTFPF滤波后的信号更趋向于陀螺仪的速度,且波形更加的平稳。

图3 TVWTFPF滤波后Y轴输出信号
为了能更加清楚地看到在速度突变的情况下滤波的好坏,图4给出了陀螺仪在转速度为10deg/s匀速旋转下突然减速的局部波形比较图。由图4可以清晰地看到,小波sym6和TFPF滤波后的信号不能实时地跟踪原始信号,偏差比较大,且存在一定的延迟,而采用TVWTFPF滤波后的信号能很好地跟踪原始信号。
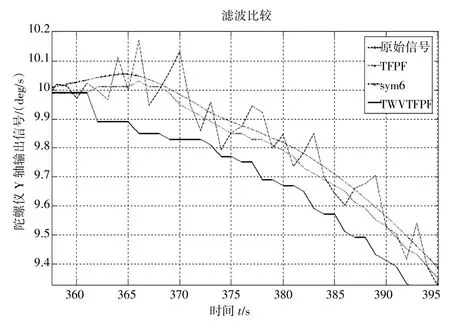
图4 各滤波算法比较
3 结束语
文中采用一种时变窗长时频峰值滤波算法,进行光纤陀螺仪的随机去噪。结果表明:在静态或动态下,采用时变窗长时频峰值滤波算法对光纤陀螺仪进行去噪,减小了信号的输出噪声,提高了输出信号的信噪比,能实时地跟踪原始信号,减小陀螺仪的输出误差。
猜你喜欢
少先队活动(2022年9期)2022-11-23
成都信息工程大学学报(2022年4期)2022-11-18
中国临床医学影像杂志(2022年6期)2022-07-26
计算技术与自动化(2022年1期)2022-04-15
北京航空航天大学学报(2021年9期)2021-11-02
强度与环境(2021年3期)2021-07-27
现代电子技术(2020年13期)2020-08-07
宇航计测技术(2018年3期)2018-09-08
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
