基于螺线管磁信标的定位系统研究
2022-06-10 07:26:46李相廷孙向阳
电子制作 2022年11期
李相廷,孙向阳
(电子科技大学电子科学与工程学院,四川成都,611731)
0 引言
传统的钻头定位方法是利用惯性导航系统即钻头实时的姿态数据来进行导向,不过这种方法测点的每个位置都依赖于上一个测点的测量和计算导致在钻进的过程中累计误差越来越大,轨迹到后面会产生较大的偏差。目前国内外常采用的定位方法主要还是行走跟踪式的无线定位方法和栅格线框定位方法,但是这些方法的限制条件较多,适用范围也比较有限,并且能够探测到的距离较短,操作起来也非常繁琐,定位的效率不够理想。本文针对水平定向钻进过程中钻头实时定位这一问题,提出了基于地面螺线管作为磁信标的实时定位方法。并对定位系统的软件做了具体设计,利用MATLAB GUI开发了上位机软件,实现了串口通信、实时波形显示、实时姿态显示、实时定位导航、误差修正与补偿等功能,最后进行了室内外定位试验,验证了定位方法的效果,通过相应的实验数据得出最终的结论。
1 理论模型
1.1 螺线管的磁场分布
图1所示为通电时螺线管的磁力线示意图。本文所述的螺线管是在圆柱体骨架上密绕漆包线,当在漆包线上通上直流电时,螺线管周围便会产生由通电电流、线圈匝数、磁芯材料等因素所决定的恒定磁场。
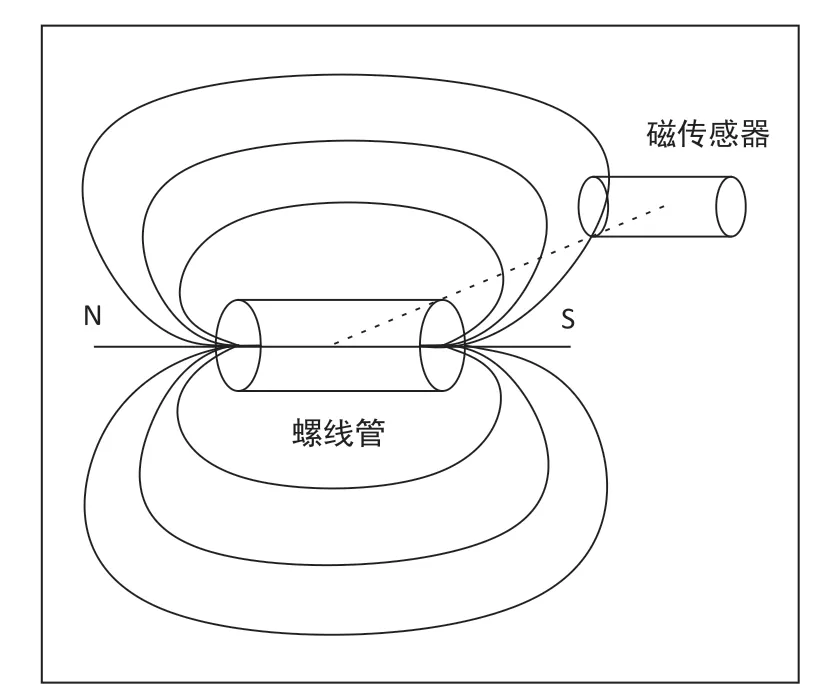
图1 螺线管磁力线示意图
以螺线管中心为原点建立直角坐标系,如图2所示。其中待定位点P(x1,y1,z1)到原点O的距离为r,沿轴向距原点z位置取微元dz,P点到微元中心O'的距离为R,a0为漆包线直径,a为螺线管骨架直径。当螺线管加载直流电流I时,微元线圈dz上通过的电流为:

图2 螺线管磁场分布计算

在直角坐标系下载流小圆环的远场任一点P的磁场分布为:

其中:


式中S为螺线管的横截面面积。沿螺线管轴向区间[-L/2,L/2]上对上式进行积分即可得到整个螺线管在P点的X方向的磁场分量Bx:

为解上面的积分,做如下变换:

式中 (R/r)-5为:

由于在实际进行钻进定位时,磁信标尺寸比定位点到原点的距离小很多,即zr<< ,将上式按麦克劳林级数展开,且由于zr<< ,所以忽略3次方及以上的高次项,即有:

将上式代入到式(5)中解得:

在实际应用中,待测点距离r远远大于1m,且不小于3倍的螺线管长度,那么忽略上式中r的负7次项对于我们定位的结果的影响几乎为零,最终可得螺线管产生的磁场X分量为:

同理可得Y和Z方向上的空间磁场分量为:

1.2 姿态测量阵列
由前面分析得出螺线管的磁场分布可知,不同位置对应的3个方向的磁场分量不同,同时在钻进工程中随着钻具的转动,测量阵列的姿态也在实时的变化,本文采用基于磁强计与加速度计的阵列来进行姿态测量,如图3所示。

图3 姿态测量示意图
其中加速度计用于测量钻具加速度,在钻具稳定时其只受重力加速度的影响,此时三轴加速度计测量的是重力加速度的三分量值。三轴磁强计是精度为1PT的矢量型磁感应强度测量器件,用于测量空间磁场的三个分量。本文后续的实验中为了更好的模拟钻具在水平定向钻进中的实际情况,将磁强计和加速度计封装到一个圆柱体的探棒中,如图4所示,通过串口与上位机连接,可直接实时的显示磁场分量与加速度分量的变化。

图4 传感器探棒实物图
1.3 收发端坐标系的统一
为了描述水平定向钻进钻具的姿态和实时定位系统的建立,需要建立合适的坐标系来实现收发端坐标系的统一。这里的发送端指的是通电的螺线管,接收端是指载有磁强计和加速度计的探棒。在进行姿态测量时一般均建立地理坐标为参考坐标系[5]。本文选择NED(北、东、地)作为定位的参考坐标系,同时在探棒阵列处建立载体坐标系o-xyz,其中原点o位于阵列中心,x轴沿轴线,z轴沿钻具工具面法线方向,x、y、z轴构成右手关系。建立坐标系后,钻具的各姿态角如图6所示,其中θ是方位角,α是工具面角,φ是倾角。根据欧拉定理可知,载体坐标系(o-xyz)统一到参考坐标系(NED)可经过有限次的转动来表示。如图5所示具体变换过程为o-xyz绕D轴旋转θ成为o-x1y1D,然后绕x1旋转φ成为o-x1yz1,最后绕y轴旋转α成为探棒当前的坐标系o-xyz。
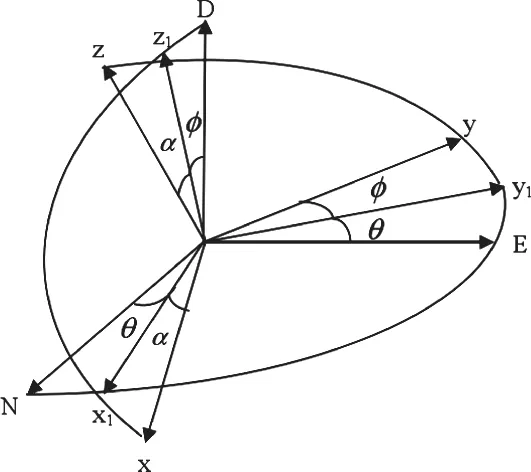
图5 坐标系的旋转变换
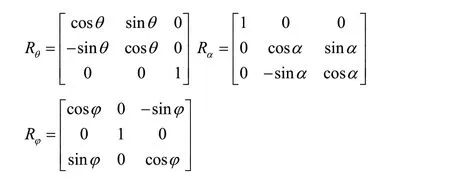
用相应的旋转矩阵来描述坐标变换,形式如下:

通过上述转换矩阵,即可得到任一向量E在地理坐标系和其在载体坐标系下满足b xyznNED
ENE= ,由于所做的都是正交变换,逆矩阵与转置矩阵相等,所以载体坐标系统一到地理坐标系的关系式为:

1.4 姿态信息测量
由三轴加速度计可实时的得到重力场在钻具坐标系下的三个分量[ ]T xyz ggg,而重力场在地理坐标系NED下只有D方向上的分量,即代入(10)中有:
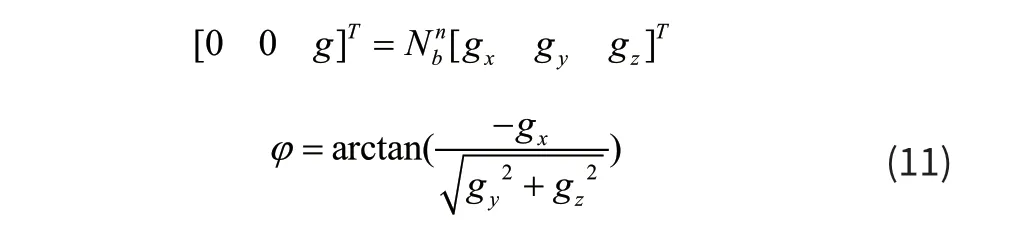
其中倾角和工具面角满足:

由三轴磁强计在没有其他外加磁场的影响下可得到地磁场的三个分量,在地理坐标系下地磁场没有E方向上的分量,同理可得到载体坐标系与地理坐标系之间的磁场分量满足:

其中eB为地磁场,β为磁倾角,,,xyzB为磁强计测得的三个分量。将bnN与α、φ代入上式几个得到方位角的表达式为:

综上所述,由测量单元测量得到的磁场三分量以及重力加速度的三个分量即可得到传感器在地理坐标系下的姿态信息,即倾角,工具面角和方位角。
2 实验验证
2.1 实验工具
本文中基于螺线管磁信标的定位系统以测量地磁场和通电螺线管产生的叠加场为数据源,同时得到的重力加速度分量用于计算钻具的姿态信息。实验实物照片如图6所示,其中螺线管采用环氧树脂骨架,轴向长度为1.2m,骨架直径为60mm,漆包线线径为1.81mm,磁芯长度为1.0m,选用DT4C纯铁磁芯。对于传感器的选择,考虑到安装误差、钻具空间限制、功耗大小等因素,本文采用测量精度为1nT的霍尼韦尔公司的三轴数字磁测传感器作为安装在探棒上的磁分量测量器件,另外对于螺线管的通电,本文中选用的是电压电流、频率可调的大功率信号源,如图7所示。
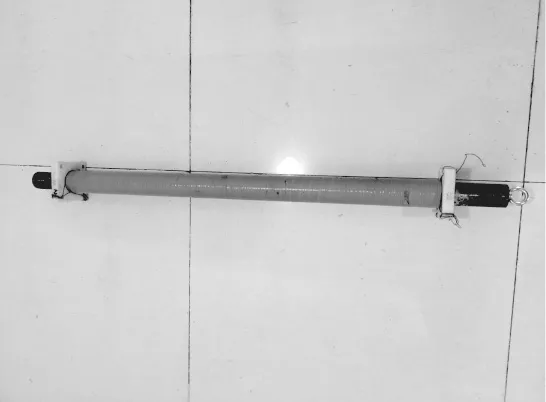
图6 螺线管实物图

图7 信号源实物图
2.2 实验方法
首先第一步是测量螺线管轴线方向上的方位角,为后续的坐标系统一做好准备。在实际工程中,螺线管是立着放的,螺线管的坐标系就是NED坐标系,但是在实验中本文螺线管是水平放置,所以需要多做一次坐标系转换。紧接着对螺线管进行定标处理,即在已知的位置测得的磁场信息反演出螺线管匝数、电流、线圈半径等常量信息。
然后在信号源处于断电状态时,启动姿态测量,确定探棒当前初始姿态,得到载体坐标系到参考坐标系的转换矩阵同时此时得到的磁场的三个分量通过傅里叶变换后可求出对应频率下的地磁场的大小,从而为后续的消除地磁场的干扰做下准备。也可通过正反接螺线管电源进行差分处理以来消除地磁场和其他背景磁场。
紧接着接通螺线管,启动测量,信号源设置频率为2Hz,输出电压为50V的正弦信号。此时探棒测得的数据在上位机的MATLAB GUI中进行显示与处理,如图8所示,其中磁场的时域波形实时显示用户界面的左端,每个图形后的文本框显示了由特定个数的数据作傅里叶变换后得到的2Hz信号的频域分量,上面的文本框为地磁场的2Hz分量,下面的文本框为通电后的值。整个界面包括了打开串口、未接通电源、接通电源、滤波、定标、统一坐标系、定位、误差补偿这几个按钮,每个按钮的作用各不相同,其中未接通电源是指对接收到的地磁场数据做傅里叶变换得到2Hz下的频域分量。接通电源是指在人工磁场激励下进行傅里叶变换,滤波则是指将两个文本框的数据相减以减少地磁场对于测量结果的影响。误差补偿按钮则是在大功率输出的条件下对由于受到螺线管电阻变化产生的定标常数项的误差做出修正补偿。
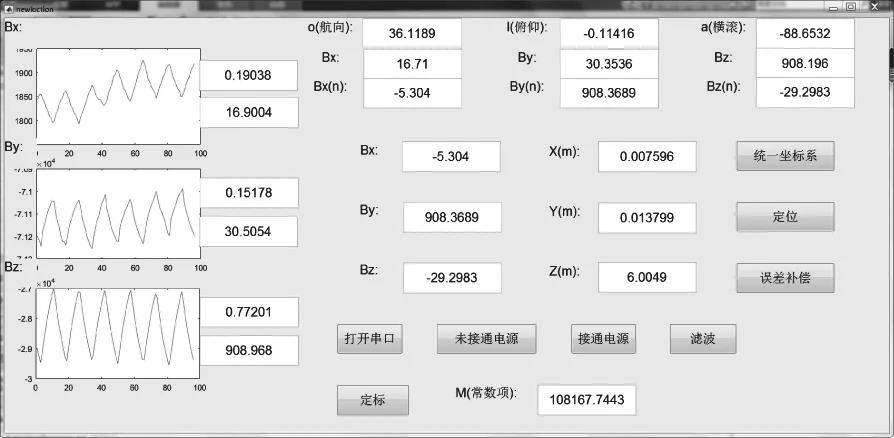
图8 数据的显示与处理
完成一次数据测量后,便可通过移动探棒的位置来分别测量并计算定位测点的坐标。最后进行定位结果的校验,从而验证本实验所设计的实时定位系统的有效性。
3 实验结果及分析
实验结果如表1所示。
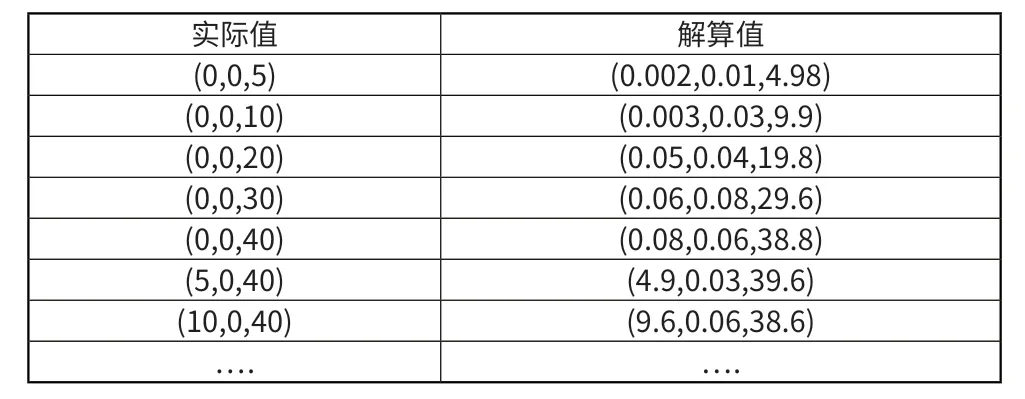
表1
由实验数据可以看出基于螺线管磁信标的定位系统效果十分理想,在40m的范围内其最大误差不超过4%。不过在实验过程中,由于螺线管通电电压为50V,地磁场的干扰量级在1nT左右,所以整个定位系统在轴线方向大于40m的定位误差将会增大,也就是说当电压为50V时其有效定位距离为40m,如果增大电压,使螺线管的功率增大,其有效定位距离也将增大。但是增大电压也会出现一个问题,就是长时间通电状态下螺线管的电阻也会随着时间增大,导致定标时的常数项与后续实际的常数项有较大误差。如果在实际工程中有超过40m的定位需求,也可用到相关的误差补偿方法来实现有效定位距离的增加,这里就不再赘述。
4 结论
总的来说,通电螺线管在作为地面磁信标时不仅易于产生可控的磁场,并且定位的有效距离大、定位精度更高。在精度为1PT的磁强计测量条件下,通过分析其信噪比和实验结果可知在选择合适的螺线管材料和尺寸以及通电功率后,其有效定位距离可以达到100m,远远满足了定向钻进工程的需求。
猜你喜欢
初中生学习指导·中考版(2021年2期)2021-09-10 07:22:44
学生天地(2020年3期)2020-08-25 09:04:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
物理通报(2017年11期)2017-11-16 05:31:04
课程教育研究·学法教法研究(2017年2期)2017-04-26 20:44:36
凿岩机械气动工具(2016年1期)2016-11-11 07:33:35
深空探测学报(2016年2期)2016-05-17 05:19:17
凿岩机械气动工具(2015年3期)2015-11-11 07:32:54
吉林地质(2014年4期)2014-03-11 16:48:12