
GNSS欺骗式干扰检测综述
2022-06-09 11:57:22王山亮张世仓蔡成林
计算机工程与应用 2022年11期
周 彦,王山亮,杨 威,易 炯,张世仓,蔡成林
1.湘潭大学 自动化与电子信息学院,湖南 湘潭 411105
2.长沙海格北斗信息技术有限公司,长沙 410003
3.中国航空工业集团公司 雷华电子技术研究所,江苏 无锡214000
全球卫星导航系统(global satellite navigation system,GNSS)通常意义上泛指所有的导航卫星系统,包括全球的、区域的和增强的系统。目前世界上有四种主要的GNSS系统,分别是美国的GPS、俄罗斯的GLONASS、欧盟的Galileo以及我国自主建设、独立运行的北斗卫星导航系统(BDS)。其主要思想就是通过位于空间的导航卫星发射无线电导航信号实现终端设备的导航、定位与授时功能[1]。
卫星导航系统已经成为人们日常生活和工业活动中不可缺少的一部分。如今,卫星导航系统已服务于交通[2-3]、电力[4]、金融[5]、通信[6]、农林牧渔[7-10]等各行各业,并赋能各行业提质升级,这显示出GNSS巨大的应用价值。然而,GNSS设备的使用在使公众的生活更加便利的同时,也带来了一定的潜在威胁。由于导航卫星距离地面2万~3万千米,导航信号到达地面时非常微弱。因此,GNSS终端非常容易受到有意或无意的干扰。而正是由于干扰的存在,使得接收终端无法工作或者即使捕获、锁定卫星信号,解算出来的位置、速度、时间(PVT)结果精度也会很低。更甚者,当不法分子利用发射设备发射虚假的导航信号并被接收终端捕获时,接收终端最终解算出虚假的导航授时信息,严重情况下会导致社会关键基础设施瘫痪、军事行动失败等后果。
近些年,全球频频发生的卫星干扰事件也证明了GNSS信号的脆弱性。2011年12月,伊朗军方利用GPS欺骗设备成功捕获一架美军隐形无人侦察机RQ-170[11]。2017年6月22日至24日期间,在黑海作业的20多艘船只受到了所谓的大规模诱骗攻击,其GPS导航系统错误地将船舶定位在了距航行位置数英里外的机场。2019年11月,北约多国联合部队举办的三叉戟军事演习期间,芬兰北部地区以及东北部地区GPS信号出现了明显的干扰情况,使得大批民航客机上的航电设备受到干扰滞留机场无法起飞,芬兰空军原本的军事演习计划也受到了很大的影响。
由以上列出的事件不难想象,有针对性地进行卫星欺骗导航的后果往往不堪设想。而且随着软件定义无线电技术和开源导航模拟软件的不断发展,欺骗的实施成本和技术门槛也逐步降低。因此,卫星导航欺骗式干扰检测的研究对卫星导航安全、可靠地提供服务具有十分重要的意义。
1 卫星导航欺骗式干扰原理及分类
根据欺骗信号生成方式的不同,目前欺骗式干扰主要分为两类,即生成式欺骗干扰和转发式欺骗干扰。
生成式欺骗干扰是在已知民用码的产生方式前提下,自主发射与真实卫星信号相似的欺骗信号,然后通过发射模块辐射到目标接收机,目标接收机在捕获到欺骗信号后,通过真实信号与欺骗信号的相关峰的相对运动,欺骗信号相关峰借由功率优势逐渐将真实信号相关峰剥离跟踪环路,随后被目标接收机锁定,从而得到错误的伪距测量值,解算得到错误的PVT信息,达到欺骗目的。因为干扰源不依赖GPS系统,所以隐蔽性很强,同时干扰源可以根据自身的需求对各项参数进行调整,灵活度高,但实施的成本相对较高,此外,对于信号结构不公开的军码,可行性不高,这也限制了其应用范围。产生式欺骗干扰模型如图1所示。
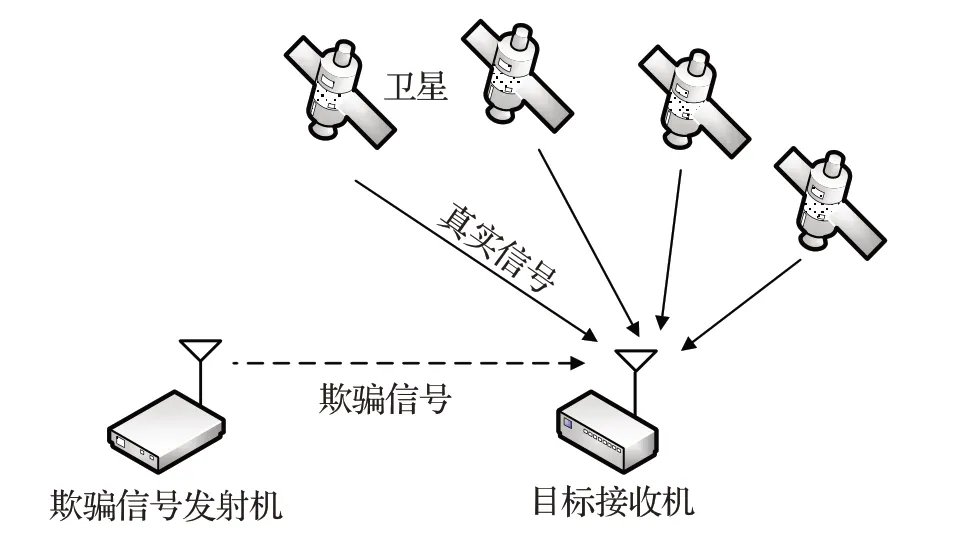
图1 生成式欺骗干扰模型Fig.1 Model of generative spoofing jamming
转发式欺骗干扰就是干扰机通过自身天线接收真实的卫星信号,然后经过适当的延迟和功率放大后发射出去。在这一过程中,干扰机不需要伪码进行码相关及方程解算处理,所以不受军码加密的限制,可以应用于对军用信号的欺骗干扰,且实施成本相对较低。但相比于生成式欺骗干扰,转发式欺骗干扰信号有个突出的特征,就是干扰信号到达目标接收机的时延一定大于真实信号到达目标接收机的时延。此外,转发式欺骗干扰只能通过改变伪距测量值来实现,其控制性相对较差。转发式欺骗干扰模型如图2所示。
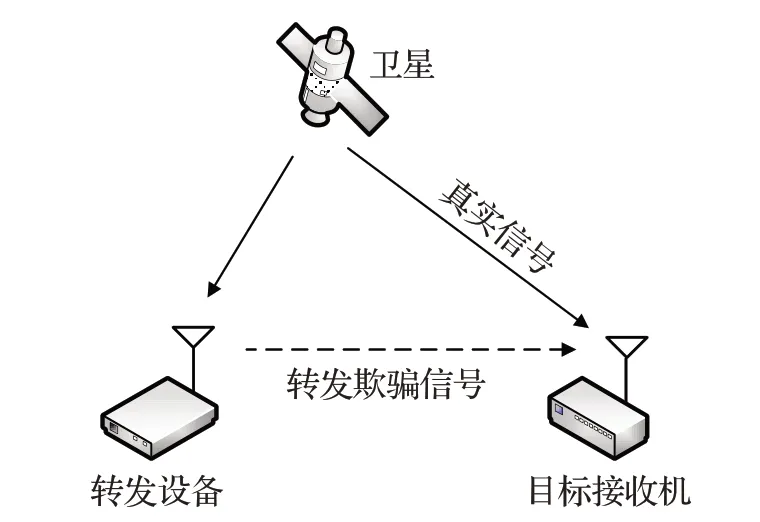
图2 转发式欺骗干扰模型Fig.2 Model of forward spoofing jamming
2 欺骗式干扰检测技术研究现状
卫星信号从产生到最终实现导航定位一般经历如下过程:卫星生成导航卫星信号,经过大气层之后辐射到天线,天线将电磁波转换成高频电流,通过接收机射频前端处理模块后变成数字中频信号,经过基带数字信号处理模块后得到GPS测量值和导航电文,最后进行解算后实现定位导航[12]。如图3所示。
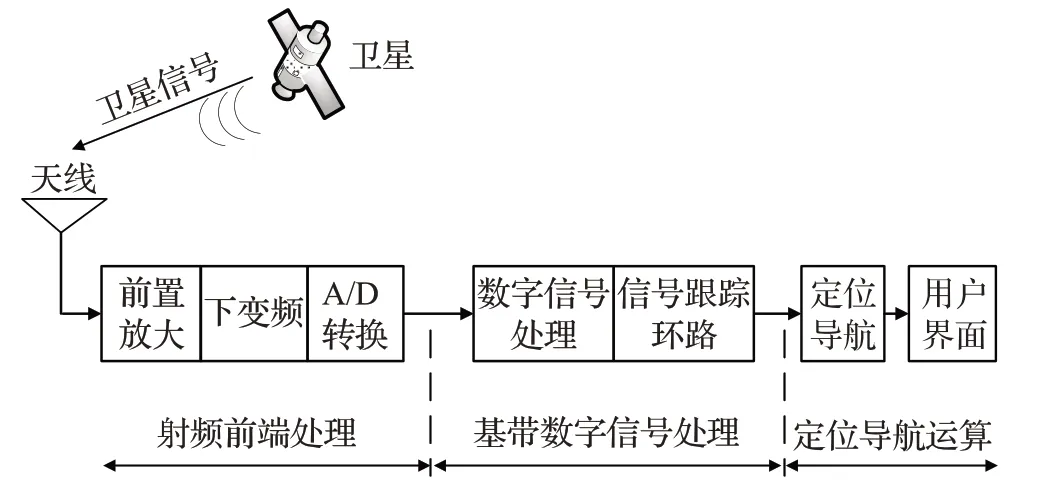
图3 卫星信号历经图Fig.3 Satellite signal ergodic map
近些年,国内外众多高校和研究机构在欺骗干扰以及欺骗信号对接收机的影响方面做了很多的研究,同时也提出了许多的欺骗干扰信号检测方法。根据卫星信号从生成到最终实现导航定位这一过程的变化和基于统计学层面,将检测方法大致归纳为六类,即基于导航数据信息的欺骗式干扰检测、基于空间处理欺骗式干扰检测、基于射频前端欺骗式干扰检测、基于基带数字信号处理欺骗式干扰检测、基于定位导航运算结果欺骗式干扰检测和基于机器学习的欺骗式干扰检测。
2.1 基于导航数据信息的欺骗式干扰检测
基于导航数据信息的欺骗干扰检测方法主要是对信号导航信息进行加密处理,通过添加类似于密码学里的信号加密特征,从而使攻击者很难获得并改变卫星信号里的导航信息,大大增强信息的安全性。由于军码在设计之初就已经进行了加密处理,故而信号加密一般针对民用信号。早在2003年Scott在文献[13]中就提出了对民用信号进行加密认证这一思想。根据从数据层面和信号层面将信号加密认证分为两类,即扩频码验证(SCA)、导航信息认证(NMA)。
SCA就是在GNSS的伪码上调制一个加密的安全码[14],通过校验伪码上的不可预测的特征,来验证伪码码片的真实性。如文献[15]利用超音速码加密民用信号;文献[16]用短序列扩频安全码修改导航信息。因为除非欺骗方预先获取到加密信息,否则很难准确预测到伪码码片,故而这类方法安全性很高,但需要改变标准信号协议。此外,对接收机也要进行改造,改造后的接收机需要有一个附加的缓冲区来存储接收到的射频信号,同时还需要一个独立的高精度的同步时钟[17],成本较高。
NMA一般通过生成和验证加密数字签名算法,使用受控的密钥对GNSS导航数据进行标识[18]。NMA的实现方式主要有两种:即数字签名技术和延迟的对称密钥传输协议技术。数字签名技术能够提供简单且标准的数据认证方式。一般的数字签名算法有RSA和DSA算法,但此类算法会造成数据开销较大的问题。为此,文献[19]使用椭圆曲线数字签名算法(ECDSA)解决数字签名引起的数据开销问题。文献[20]提出了一种比ECDSA更优的认证方案。延迟的对称密钥传输协议技术是建立在单向哈希链基础上实现的。当前属于此类协议的有两种:即时间效应流丢失容错认证(TESLA)和高效多链流签名(EMSS)。TESLA通过密钥延迟发布技术将最初的对称加密模型变为非对称加密模型,其需要发送方和接收方预先同步时钟。文献[21]就TESLA协议进行修改,以便让所有卫星使用单一密钥链。EMSS使用的是一连串的哈希链,同时对最后一个哈希链数字签名,该方法不需要时钟同步,但要求接收机同时接收数字签名和哈希值。为了安全可靠,NMA一般对整个导航信息进行加密,这就需要修改导航信号的接口规范,给应用带来了很大不便[22]。
值得一提的是,文献[23]将扩频码加密和导航电文加密结合起来,利用分组密码算法加密验证消息,用非对称加密算法和密码杂凑算法生成签名,同时使用扩频调制技术将其隐藏在导航信息中,最终成功检测欺骗攻击。文献[24]提出一种卫星和接收机之间的双向身份认证和通信会话密钥协商的加密认证方案,可以抵御转发式欺骗干扰,不增加额外的卫星和接收机硬件成本,但是需要地面控制中心参与其中。
民用卫星信号的信号加密技术的实施,虽然可以保证用户的安全可靠,不容易上当受骗,且接收方的授权应用程序可以避免接收方的额外硬件开销,但要做到这一点却非常困难。因为加密信息是一项庞大的工程,需要由国家层面对整个卫星导航信号体制进行更改,成本相对较高,对接收方也需要进行一些改进。对于目前数量极其庞大的GNSS民用接收机来说,该技术的应用在短期内很难实现。此外,由于转发式欺骗干扰并没有改变导航数据的比特位,故而仅仅通过信号加密认证来应对转发式欺骗干扰往往是不可行的,可以结合非电文加密技术中的到达时检测技术,来提高接收机的安全性。
对于导航电文加密技术和扩频码加密技术的比较如表1所示。
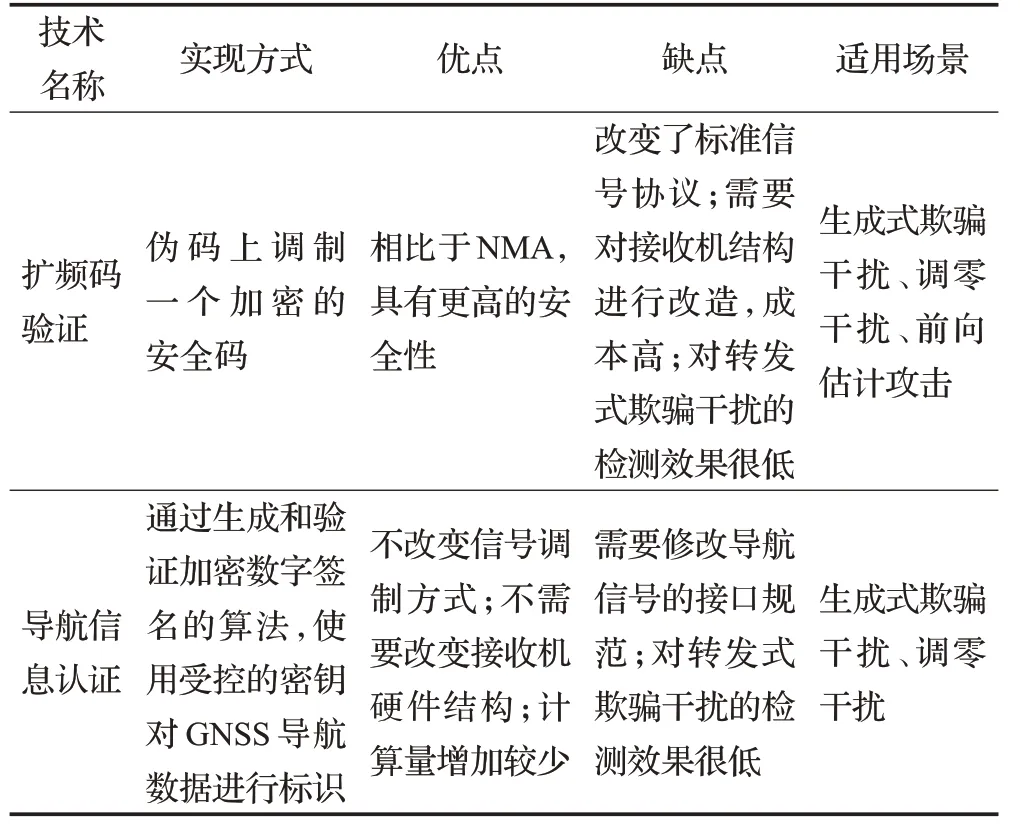
表1 NMA和SCA性能比较Table 1 Performance comparison of NMA and SCA
2.2 基于空间信息处理的欺骗式干扰检测
欺骗式干扰源通常从同一天线发射多个欺骗信号,而真实信号则从不同方向的不同卫星发射,如图4所示。因此,可以利用空间处理技术来估计接收信号的空间特征,并识别那些空间相关的信号[25]。由于卫星的空间几何信息几乎不可能被模仿,因此信号的来向检测是当前实现欺骗干扰检测最有效的方法之一。
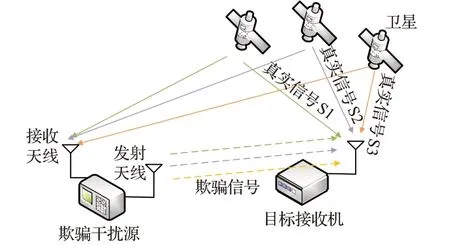
图4 真实/欺骗信号空间信息图Fig.4 Real/spoofed signal spatial infographic
鉴于此,文献[26]和[27]通过单天线接收机在运动过程中不同历元时刻相关器的输出来进行欺骗干扰检测。但是此类方法一般都需要接收机进行大量的计算处理,且需要对接收机算法进行大量修改,这无疑加大了接收机的负荷,于是有人就提出将天线进行简单的改造,即让其旋转起来,通过对天线匀速旋转条件下接收机输出载波相位测量值的处理,实现欺骗干扰信号的到达角检测,无需修改接收机信号处理算法[28]。但无论是基于固定单天线还是经过改造后的旋转单天线,其都有一个很大的弊端,即只能运用于固定安装在已知位置的场景,为了解决这一问题,张鑫[29]提出了基于旋转双天线的检测方案,通过将两个阵元的输出序列作差,消除平动项的影响,这样就具备了在移动载体上进行欺骗干扰检测的能力。当欺骗信号单一或者通过位于不同空间位置的天线发射出来时,以上检测方案就会失效,针对此情形,文献[30]提出了一种利用双天线和干涉仪对GPS载波信号进行方位角估计的方法,从而实现欺骗干扰检测,但是增加的干涉仪同样也增加了检测成本。文献[31]采用两个低成本的固定的GNSS天线形成基线矢量,然后将载波相位双差数据与星历数据相结合求出基线向量,继而实现干扰检测。但是该检测方法要求两根GNSS天线固定,这使其应用范围大打折扣,无法适用于动态场景。此外,利用天线阵列也可以实现对单一欺骗信号或来自多方向欺骗信号的检测,通过天线阵列彼此之间已知的空间关系对欺骗信号形成制约,从而很容易实现来自不同发射天线的欺骗干扰检测,同时也能将欺骗干扰信号消除[32-34]。文献[35]提出一种基于阵列天线的卫星和欺骗器到达方向(DoA)估计的欺骗探测技术,采用压缩感知的正交匹配追踪(OMP)方法,在样本数量较少的情况下,精确估计所有PRN信号的DoA,并对所有PRN信号的DoA估计结果进行欺骗检测。该方法在复杂的欺骗场景中仍有较好的检测效果。
基于空间处理的欺骗干扰检测方法,一般来说,接收天线数量少,接收机在处理时就要进行大量计算,同时最后的检测效果相对于多天线的也较差,应用范围有限。当增加接收天线数量时,虽然会提升检测效果,但也相应地提高了系统硬件成本,此外通过采用特殊性能的天线[36]也可以实现欺骗干扰的有效检测,但特制天线的使用也提升了整个检测系统的成本,不便于大范围推广使用。基于信号空间几何信息的检测方法的比较如表2所示。
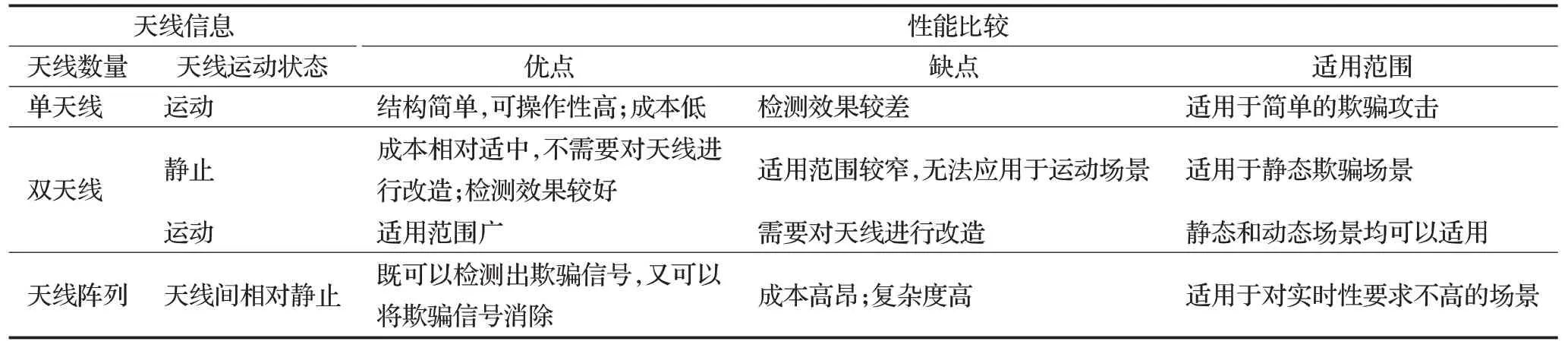
表2 信号空间几何信息的检测方法比较Table 2 Comparison of detection methods of signal spatial geometric information
2.3 基于射频前端处理的欺骗式干扰检测
接收机射频前端处理模块通过天线接收所有可见GNSS卫星信号,经前置滤波器和前置放大器的滤波放大后,再与本机振荡器产生的本振信号进行混频而下变频成中频信号,最后经模数转换后将中频信号转换成离散时间的数字中频信号[12]。
接收机射频前端一般都会有自动增益控制(AGC)来用于调整射频前端增益,以使模数转换(ADC)的输入电平在一定范围内保持稳定。在无干扰情况下,AGC的增益值只会在很小的范围内变化,但是当有功率较大的欺骗干扰信号进入射频前端时,AGC的增益就会出现较大的波动,于是就可以依据此特征来进行欺骗干扰检测[37]。AGC增益部分不涉及数字信号处理过程,因此鲁棒性较强,且具有较低的计算复杂度。但是该方法对于像逐步拉偏式这种功率精密控制的欺骗式干扰漏检率会很高。
2.4 基于基带数字信号处理欺骗式干扰检测
基带数字信号处理模块通过处理射频前端所输出的数字中频信号,复制出与接收到的卫星信号相一致的本地载波和本地伪码信号,从而实现对GNSS信号的捕获与跟踪,并且从中获得GNSS伪距和载波相位等测量值以及解调出导航电文[12]。一般来说,当存在欺骗干扰时,欺骗信号和真实信号在经过基带数字信号处理后,其在接收信号强度、信号质量、多普勒频移一致性、信号到达时间等方面会有比较显著的差异,因此通过合适的检测方案将其差异识别出来即可实现欺骗干扰检测。
2.4.1 接收信号强度检测
接收信号强度检测是单天线接收机常用的方法,一般是在信号解扩后进行检测。其主要研究思路是当存在欺骗式干扰时,接收到的卫星信号在绝对功率、载噪比(C/N0)、L1/L2功率比出现异常,通过检测是否出现异常来检测是否存在欺骗式干扰。
绝对功率检测:即通过检测接收到的绝对功率是否远远大于设定的卫星信号真实功率的阈值来发现欺骗信号。由于欺骗干扰机和目标接收机之间的路径损耗变化很大,所以从欺骗干扰机角度,估计在目标接收机上施加足够的信号强度所需的发射功率,同时又不过分超过真实GPS信号的功率是一件困难的事[38]。因此,接收一个绝对功率大大高于预期的真实GPS信号功率的欺骗干扰信号是检测欺骗攻击的简单而直接的方法[39]。但是对于比较复杂精确的逐步拉偏式欺骗干扰和多径效应,如果仅仅检测信号绝对功率,则漏警率会非常高,检测效果很差。对此,文献[40]提出了一种总信号能量检测的方法,通过建立能分别反映信号分量功率和噪声底面电平的新检测量,实现干扰检测,在欺骗干扰和真实信号的接收强度非常接近的情况下,该方法仍能很好地工作,但是该方法还是无法有效应对多径效应。
C/N0检测:一般情况下,欺骗干扰装置发射的信号功率会高于实际卫星信号的功率。当有大功率欺骗信号攻击GPS接收机时,接收机接收到的C/N0可能会突然变化。该方法通过持续监测C/N0的变化,查找可能是攻击迹象的异常变化,从而发现是否存在欺骗干扰信号[41]。同样地,该方法对于比较复杂精确的逐步拉偏式欺骗干扰的检测效果很差。
L1/L2功率对比度检测:是基于接收机可以同时监测GPS中L1和L2信号的功率,而低精度的欺骗设备可能只能欺骗L1信号中的干扰,因此,通过检测L1和L2的功率电平异常差异或L2信号是否存在,就有可能检测到是否存在欺骗干扰信号[42]。然而,大多数民用接收机无法同时监测L1和L2波段,这限制了该检测技术的应用范围。基于信号幅度的检测方法性能比较如表3所示。
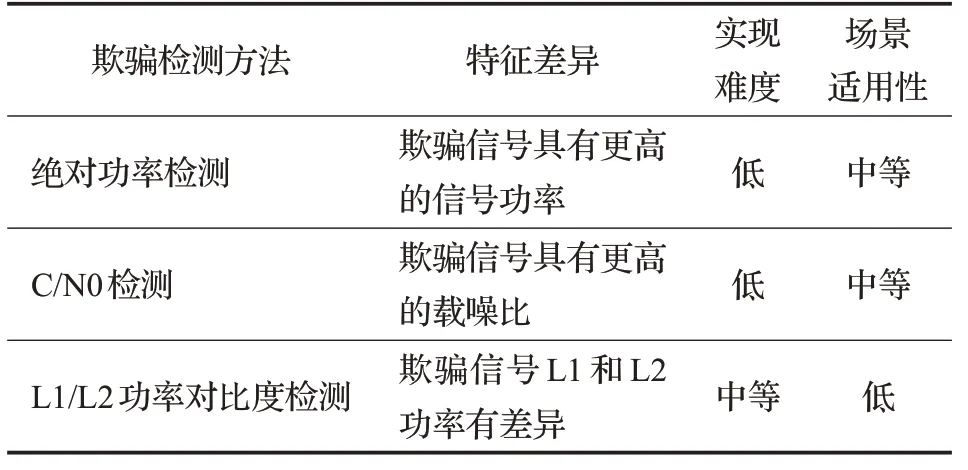
表3 信号强度检测方法比较Table 3 Comparison of signal strength detection methods
2.4.2 信号质量检测
信号质量检测(SQM)技术是基于欺骗干扰信号与真实卫星信号的相互作用,导致跟踪相位相关峰值失真,通过对GNSS接收机跟踪环路中早码、即时码和晚码相关器的输出值进行计算,识别相关函数的形变。SQM一般通过检测相关峰的不对称性或相关峰的异常尖锐和平坦这两个指标来监测信号相关峰可能的失真和异常[43],其对应的检测算法分别是Delta算法和Ratio算法[44]。当前主要通过监测相关峰在时域和频域上对真实信号和欺骗信号进行分析,找出差异特征,最终实现检测。
在时域上,针对小时延欺骗信号检测问题上,文献[45]在捕获阶段获取二维搜索矩阵,并利用卷积神经网络实现欺骗干扰信号的识别,最终实验得出在0.5个码片及以上的欺骗与真实卫星信号码相位差下,可以有效识别欺骗信号。针对大时延欺骗信号和小时延欺骗信号检测问题上,文献[46]提出了一种信号捕获阶段的联合检测方案,通过检测相关峰的个数实现对大时延转发式欺骗干扰的检测,利用相关峰的半高宽(FWHM)实现对小时延欺骗信号的检测。文献[47]提出一种检测码跟踪环中过零点S曲线偏差(SCB)方差值变化的中级欺骗干扰检测方法。文献[48]提出一种通过多个相关器测量自相关函数变形的检测方法。对于以上采用的标量跟踪结构,SQM可以根据相关峰重叠对相干积分结果的影响有效检测欺骗干扰。但是,当重叠不存在时,这些方法是无效的。对此文献[49]采用矢量跟踪结构对所有接收信号进行联合跟踪,发现无论是否存在重叠,相干积分结果都会受到欺骗干扰的影响,从而最终实现干扰检测。
在频域上,文献[50]利用GPS卫星信号的码相关特性和转发信号的时延特性,提出了一种基于FFT的卫星信号转发式欺骗干扰检测方法,此方法可以有效识别转发延迟不小于1.5个码片的欺骗干扰信号。文献[51]依据接收机捕获结果中伪码相关峰呈现三角形的特点,提取相关三角形两侧斜率值,并结合快速傅里叶变换(FFT)快速捕获算法,提出基于伪码相关峰斜率正负跳变和斜率峰值等间隔分布的转发式干扰检测方法。
信号质量检测因其简单性和有效性而在多径检测和欺骗检测中备受青睐,但是其检测效果受到真实信号与欺骗信号相关峰间隔有关,而且当干扰源采用压制式干扰时,欺骗信号占据跟踪环路,此时欺骗信号在与真实卫星信号相互作用后,欺骗信号凭借功率优势使得相关峰的失真很小,从而出现漏检的情形,故而一般采用多种策略协同检测,先检测是否有压制式干扰,确定没有后,再分别采用针对大时延欺骗信号和小时延欺骗信号的检测方法,从而提升整个检测方案的完整性,但如果采用直接将多种欺骗检测结果相或的方法,则检测性能将会随着某一种检测器性能下降而下降[52]。因此,如果发现某一个检测器性能误差超过门限,则在融合过程中剔除该检测方案,从而可以保证当一种检测方法失效不会影响融合后的整体性能。
2.4.3 多普勒频移一致性检测

多普勒频移是由卫星和接收机间的相对运动造成的,其计算公式如下:其中,f d为多普勒频移;ν为接收机的速度;ν(s)为卫星的运行速度;I(s)为卫星在接收机处的单位观测矢量;λ为波长。
由式(1)分析可知,在GNSS信号穿过电离层后,载波多普勒频移与伪码多普勒频移应该保持一致性,即两个频率之比应该为一个常数。然而,欺骗干扰信号往往无法保持这两个参数的一致性,文献[53]据此进行欺骗干扰检测。文献[54]指出可以根据接收机的高度和速度估计多普勒频移的变化。如果接收机遇到欺骗干扰,则多普勒频移的变化会发生异常。文献[55]提出了一种联合利用GNSS信号传递的导航信息和接收机垂直往复运动引起的波状多普勒变化的欺骗检测方法,此方法既能检测单天线欺骗干扰,又能应对多天线欺骗干扰。文献[56]利用载波相位观测和导航信息精确估计一对固定天线的到达频率差,根据观测结果是否与预测结果相一致来判别是否有欺骗干扰。
2.4.4 信号到达时间检测
根据第1章中转发式欺骗干扰原理可以看到,当使用转发设备对GNSS信号进行接收并转发后,目标接收机接收到的欺骗信号必然与真实信号在时间维度上有一定延迟,故可以根据这一特征来检测是否有欺骗信号的入侵。针对信号到达时间的检测方案主要探讨分析伪码和数据位的时间延迟[14,57-58]和L1/L2信号的相对时间延迟[38]。利用信号到达时间进行卫星导航欺骗干扰检测,通常对固定位置接收机等有一定效果,对于动态场景其适用性有待提高。
2.5 基于定位导航结果的欺骗式干扰检测
卫星信号经过基带数字信号处理模块载波解调和伪码解扩后,得到导航电文同时在解调解扩的过程中,还会得到伪距、速度等信息。有些学者就从这些定位导航结果信息出发,提出一系列检测算法。
肖岭等[59]利用伪距单差结合方差分析技术通过分析不同信号伪距单差均值的一致性来检测欺骗信号,但是其检测性能受热噪声方差、接收机之间的基线长度以及卫星个数的影响,为此,刘科等[60]通过双接收机的伪距双差、卫星与载体的距离双差以及卫星钟差双差计算得到误差值,基于误差值的明显差异性实现对信号的检测与判别。Tao等[61]从速度角度出发,依据多普勒测量和伪距测量都与接收机的速度有关,采用两种计算速度的方法来检验多普勒频移和伪距测量的一致性。Jeong等[62]通过监测修正伪距和估计距离之间的差异变化来检测欺骗信号,但是该检测方法仅适用于使用地基增强系统(GBAS)数据的系统。
利用其他高精度辅助设备测得的数据信息来与GNSS接收机测得数据信息进行一致性比较是另一部分学者的研究思路。
接收机终端之所以容易被恶意干扰,主要是因为其接收的卫星信号易受到电磁干扰。因此,通过引入不受电磁影响的高精度设备,将其测得的数据信息与接收机终端解算的结果进行比对这一思路应运而生。目前可用于辅助检测的设备有很多,如惯性导航系统(INS)、芯片级原子钟、加速度计等。
INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其能够在短时间内提供高精度、高稳定性的导航参数[63]。这些性质恰恰可以用来辅助欺骗干扰检测。文献[64]通过欺骗信号与真实信号在空间几何关系的差异,建立了在正常环境和欺骗场景下伪距/载波相位双差数学模型,并将接收机实际测得的双差观测值与INS数据计算的双差观测值进行比对,从而判别是否受到干扰。针对载波相位单差技术无法应用于运动载体,载波相位双差检测技术对多阵元发射的欺骗信号或单路欺骗信号失效这一问题,文献[65]利用干扰源与真实卫星到天线阵距离上的差异这一特征,提出一种惯导辅助的三元天线阵欺骗干扰检测技术,通过运动载体在某一时间段内运动一段距离即可进行欺骗干扰检测。文献[66]通过研究GNSS欺骗干扰对INS/GNSS的卡尔曼滤波协方差、新息序列和惯性传感器偏差估计的影响,给出了一种基于新息序列和惯性传感器偏差欺骗检测的方案。文献[67]将统计学中的广义似然比应用到干扰检测中,通过对GNSS和IMU的测量模型进行分析,设计了欺骗干扰检测模型,构建了假设性检验模型,并通过广义似然比检验来实现最终的检测。上述检测方案都是在干扰信号拉偏程度大于纯惯导误差漂移的情形下,最终的检测效果差强人意,但是当遇到不易被INS识别的逐步诱导式精细拉偏时,其检测效果就显得不尽人意,针对这一情形,文献[68]从速度和位置两种惯性信息出发,研究了位置欺骗和速度欺骗对伪距测量和伪距率测量带来的影响,并结合INS短时间位置误差传播模型,分析了真实信号和欺骗信号下伪距和伪距率变化的一致性关系,并构造了时间序列模型来实现信号的判别。
商业化芯片级原子钟产品具有小体积、高稳定度、低功耗等特点,这些优点也使其在欺骗干扰检测中大放异彩[69]。文献[70]从时间维度进行欺骗检测,通过分析欺骗干扰对接收机时间的影响,针对先压制后欺骗干扰的欺骗模式,基于真实信号和欺骗信号下的钟差预测误差分布,构造了芯片级原子钟辅助的欺骗检测模型。
加速度计因为具有良好的偏差稳定性,且成本很低,不受电磁干扰,因此在欺骗干扰检测中可以作为辅助设备。文献[71]通过比较加速度计输出信息与GPS输出信息的差异,提出了一种加速度计辅助的GNSS欺骗检测算法,该算法能有效检测出由于欺骗干扰引起的加速度参数异常变化。
虽然这些辅助设备能在欺骗检测中起着举足轻重的作用,但是在实际应用中还要考虑诸多其他因素,如INS系统所用的时钟、加速度计和陀螺仪等元件具有无法消除的系统误差,因此,随着工作时间的累积,其误差累积越来越大[72],导致INS系统无法用于长时间的欺骗干扰检测。一般将INS与GNSS相结合,在GNSS信号良好时,接收GNSS信息用于修正INS的计算结果。芯片级原子钟虽然有着优异的检测效果,但是其造价相当昂贵,不适合大范围普及。
2.6 基于机器学习的欺骗式干扰检测
近年来,机器学习在信息安全、医药学、生物学、金融市场、公共交通、制造业等众多行业和领域扮演着日益重要的角色[73]。鉴于机器学习具有快速处理大量数据、分析提取有效信息等优点,一些研究人员将机器学习引入到卫星导航欺骗式干扰检测中,通过机器学习算法学习输入特征间的差异,从而将欺骗信号和真实信号区分开来,实现欺骗式干扰检测。目前基于机器学习的欺骗式干扰检测方法有Shafiee等[74]提出了用多层神经网络训练进行欺骗干扰检测;Li等[75]探讨了将生成对抗网络(GAN)应用于欺骗干扰检测的可行性并在文献[76]中通过网络中欺骗干扰和抗欺骗干扰的对抗学习,成功实现了对小时延欺骗干扰信号的检测。考虑到传统的检测算法大多仅利用一个参数检测欺骗干扰,具有一定的局限性,卢丹等[77]提出一种融合布谷鸟搜索算法和分类支持向量机的多参数欺骗干扰检测算法;针对载波相位差分检测技术中存在的模糊度解算复杂和虚警率高的问题,庞春雷等[78]提出一种基于概率神经网络(PNN)的检测方法;Xu等[79]提出了一种多通道一维全卷积神经网络故障检测方法。
机器学习方法因其具有模型鲁棒性强、泛化能力高、自动表征复杂多元非线性关系等特点,在信号检测中大放异彩,但根据机器学习中“没有免费的午餐”定理,没有算法能够完美地解决所有问题,在针对具体问题时,需要采用合适的机器学习算法,才能达到比较好的效果。
表4对以上各种欺骗干扰检测技术进行总结。
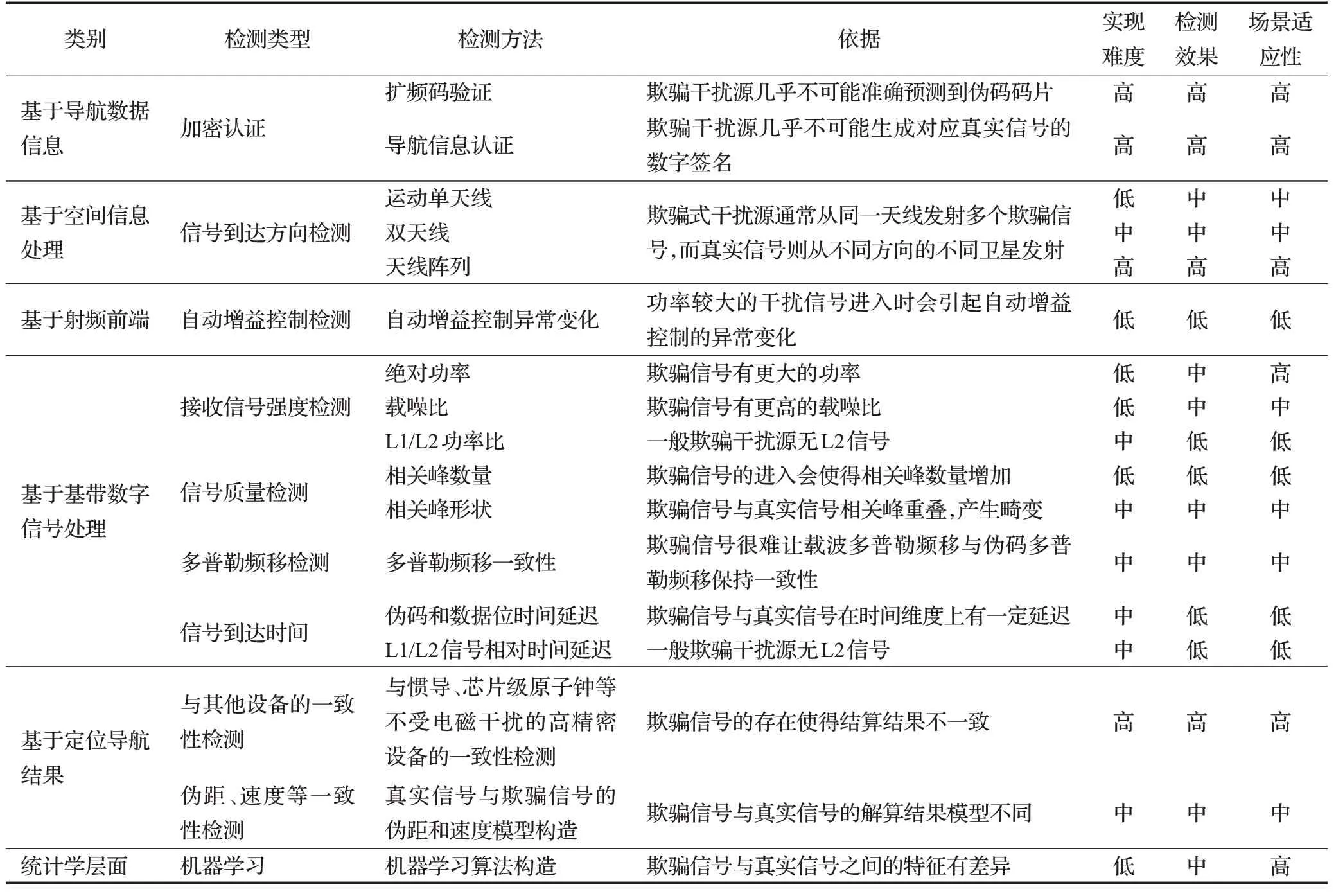
表4 欺骗干扰检测技术比较table 4 Comparison of spoofing jamming detection methods
3 GNSS欺骗干扰检测技术研究趋势
3.1 实时检测
目前针对欺骗信号干扰检测的方法基本上是非实时的,一般采集相关信息后进行事后处理以完成欺骗信号干扰检测。这对于像汽车、飞机、轮船导航等实时性要求极高的应用场景就显得力不从心,故而一方面可以从优化算法和实验方案等角度提升接收机处理速度,达到实时检测的目标;另外,检测与对抗(或决策)形成闭环,对于增强系统可靠性具有重要作用,是未来的研究方向之一。
3.2 融合检测
通过第2章对当前的欺骗干扰检测研究现状分析归纳可以看出,目前大部分欺骗干扰检测方法通过在某一特定场景下,真实信号与欺骗干扰信号在某一方面的差异来实现欺骗干扰检测,而像文献[80-82]这样多方案协同检测的检测方案少之又少。针对特定场景的单一特征检测可能检测效果很好,而当将其应用到其他场景时,该方法缺乏复杂环境适应性,其检测效果就不尽如人意。因此,综合检测是一个可行的理想的发展方向,可以通过将几个干扰检测方案进行融合,实现综合检测,并不断进行整个检测系统的完善,使其更具通用性。但目前实现综合检测的难题主要有:干扰信号具有很大的未知性,无法提前预知,当采用多方案相或的协同检测时,虽然在环境的适应性上提高了,但最终的检测效果会下降,因此如何平衡适应性和最后检测效果是一个值得考虑的问题;另外多方案融合检测相应地增加了冗余计算量,对接收机有更高的硬件要求。
猜你喜欢
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
太原科技大学学报(2019年3期)2019-08-05 01:18:18
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
工业设计(2016年6期)2016-04-17 06:42:54
信息安全研究(2016年10期)2016-02-28 20:18:19
海军航空大学学报(2015年4期)2015-02-27 13:45:51
