
基于计算机视觉技术的智能化电厂应用
2022-06-09 12:41内蒙古科技大学李群李建军
数字技术与应用 2022年5期
内蒙古科技大学 李群 李建军
通过自主导航的视觉算法进行导航框架设计,采取SLAM稀疏点云最小化的优化算法,完成DWA模型构建,配合实现智能巡检机器人的动态避障,在现有顺滑轨迹基础之上进行全局优化,基于ROS通信架构,对智能巡检机器人的巡检路线开展设计,完成固定坐标点和自定义坐标点的双重配合,提升智能巡检机器人的完全巡查功能。
巡检机器人可以为设备复杂的汽机房和镂空钢板的锅炉房提供安全的巡检方式,以绿色安全通道或安全设备距离的巡检路径作为数据载体,基础带电作业完成实时巡检,优化巡检线路,且自动避障。现有设计原理主要通过全局最优路径开展分割化处理,在计算机视觉分析的基础之上,考虑到机器人动力学习模型基于算法层的PCL双雷达融合以及DWA最小化Snap开展综合运算,完成最小化Snap的轨迹优化,从而提升计算机视觉算法的指导作用,改进软约束函数对数据拼接情况开展综合分析。
1 计算机视觉巡检在智能化电厂中应用的价值
近年来,我国经济转型升级,高质量企业数量增多,社会工业化程度稳步攀升,城镇化水平达到65%以上,社会生产、居民生活对用电的需求显著增加。伴随着技术的转型升级,市场需求的蓬勃发展,当前制造业现代化转型在稳步进行当中,电力巡检也必然在这样的内驱力和外部拉力之下,不断的加强自主巡检、智能化巡检,以提升自身管理的有效性,降低电力设备运行的成本,提高数据库建设的全面性,满足智能变电站建设的需求,满足社会企业居民用电对于高质量供电的需求,采取先进智能的巡检模式,弥补现有的人工巡检的不足。
2 计算机视觉巡检在智能化电厂中的系统设计
当前的移动机器人具备工作灵活、效率较高、覆盖范围广、受到外部因素影响小的多种优点,配合计算机智能传感技术,远程实时识别技术、数字管理技术、后台操作技术,能够大幅度提高电力系统的安全管理效能,强化预警能力和风险管控能力,提高故障响应决策的分析效率[1]。具体结合实际生产情况来看,其应用主要通过以下几种路径:
2.1 机械结构设计
基于科大智能变电站巡检机器人的基础架构,进行充分的物理结构的设计与分析,机器人主要的框架是由运动底盘和监测平台这两部分组成,具体架构为驱动电机座、云台、固定板车体结构板材形成移动框架,并基于原有的麦克纳姆轮结构,基于科大智能变电站巡检机器人的架构,对智能巡检机器人的巡检方法进行设计[2]。
2.2 运动控制系统
通过算法分析方法进行编码器的自动校正,采取四编码电机驱动正逆解控制对云台、固定板车体、结构板材、驱动电机座进行结构分析,并基于多激光雷达点云数据对运动方式进行拼接,形成协同作业。
2.3 计算机视觉分析
2.3.1 图像处理优化
在视觉SLAM的基础之上,采取cartographer算法,实行双雷达辅助位智能机器人后期的信息采集信息协同提供数据辅助系统,并配合信息建设,对智能机器巡检的里程计数,实施全面数据抓取,按照计算机视觉系统的部署,获得点阵图谱,建立稀疏点云,并按照视觉化之后的ORB-SLAM和基于稠密点云的TAP-map完成里程计数计算以及数据驱动采集,为视觉SLAM解决方案的成套建设提供数据支撑[3]。
未来解决这种问题,主要是通过实时修正的方法,对已有的数据进行压缩和筛选,在计算机理论体系当中,图的优化概念是通过数据节点和数据结构的优化进行节点和边的数据构造,引入激光SLAM之后可以改变移动智能机器人的姿态定位,从而优化节点组合,使节点和节点之间的关系,转变成为边与边的关系。
通过Skin to Map对移动智能机器人的中点坐标进行不停的变化,因此屁零Pn代表的点图信息是不一样的,由此得到的Pn点坐标也不存在重叠的可能[4]。按照这种计算方法,就可以将上面讨论的位置,姿态定义的问题转化为位置与位置之间相互约束的边与边的关系,从而把握较大场景内的环境约束特征,通过约束求解节点,也就是完成图优化的过程。
具体流程如下:
P0节点为(x,y,0),Pn为(x,y,0,)

进一步转换,得到误差函数:
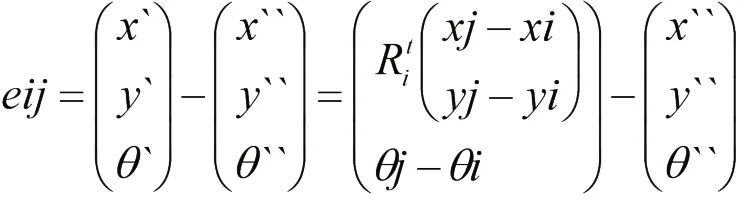
两点间偏移量为(xyo'y)
其中心为转换矩阵
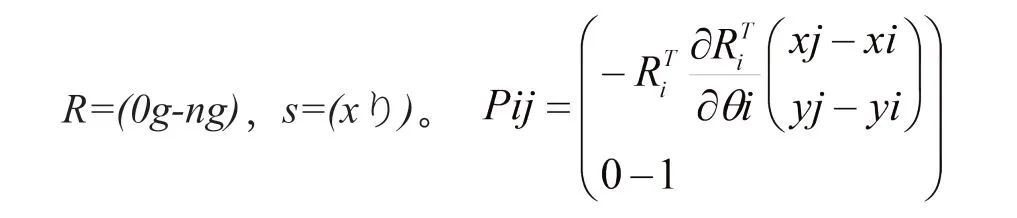
对构建优化理论方法进行求解,在现实生产车间的环境中除了起点外都是不确定的未知量,为后来的激光雷达测量得到十分准确的数据偏移量[5]。此时令λ=ΣneTe,即求得误差最小即可。
将问题转化并求解:

对于每一个eA,e
一阶采用Taylor展开
最后累加求和即为入近似展开:
简化成:Hij▽Sij=-bij
2.3.2 构建稀疏点云系统基础
整个系统采用ORB-SLAM2算法创建云地图,ORBSLAM在PTAM的基础上进行了实时回环检测和鲁棒性增强的重定位和实时回环检测两方面的算法改进,ORB-SLAM2ORB-SLAM继续沿用原来的PTAM方案,通过对tracking类中进行多层次的构造,再提取特征点[6]。
假设P值先前存在于栅格点,那么令函数M~(x)在区间限定函数clamp进行值的更新,如下:

在Scan匹配后采用最小二乘对获取的Scan中点束经位姿转换落在Submap中的最优位置进行优化,可表达为:

Cartographer通过运用多个Submap来建立大场景下满足各方面需求的高精度图,短时间内目标跟多个LaserScan匹配后的位姿是精确可靠的,但长时间后需要进行修正,所以后端采用回环检测来对长时间积累产生的误差进行优化,对创建的Submap以及当前帧的LaserScan都会被作为输入进行Scans匹配,如图1所示。
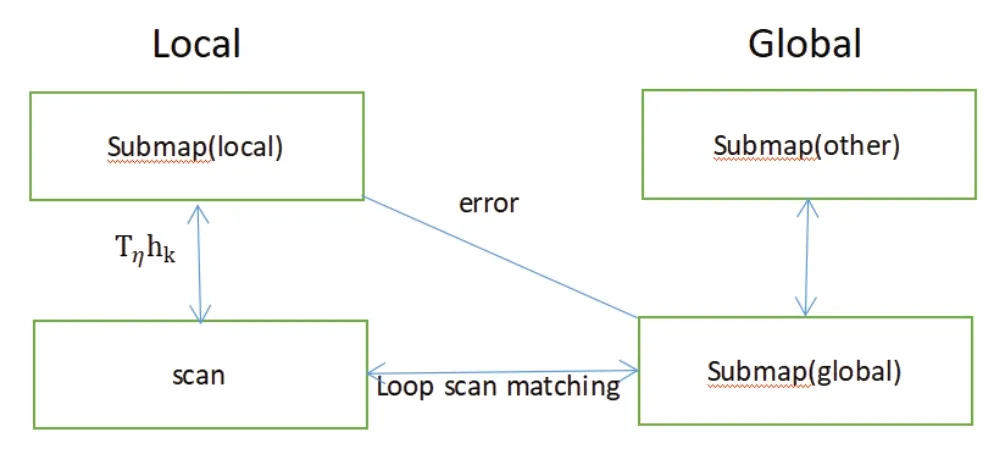
图1 Scan与Submap关系图Fig.1 Scan and Submap diagram
采用该算法整个的优化了上图两者之间存在的位姿误差,进而得到更小的误差。目前市面上生产的智能巡检机器人的基层结构大多数都是该系统算法。相信随着社会的发展,整个技术方面会进一步革新,适应面更加广泛。
2.4 智能避障功能
在Move-base框架下的机器人能够对障碍物实现更灵活的躲避。通过利用DWA算法对实际工作状态空间做固定时间采样来满足机器人运动模型要求,进而可以对静态路径进一步优化提升,使整个路径符合实际生产现场场景[5],如图2所示。

图2 智能避障轨迹图Fig.2 Trajectory map of intelligent obstacle avoidance
DWA (Dynamic Window Approach)是具有挑选速度机制的算法,DWA需要通过结合机器人的运动模型在短时间内模拟出机器人的运动轨迹,并根据机器人自身与周边环境的限制进而将采样的多组速度控制在一定范围。该算法有几个约束条件:机器人基于安全方面的考虑在最大、最小速度和加速度、减速度等具有约束,机器人可以躲避障碍以较快的速度在相对较短的时间内朝着目标行驶[7]。
该算法通过筛选轨迹路径和简便计算进而快速反应并得出轨迹。路径筛选后结合计算出的最优速度进行推算动态轨迹。整个运算过程是简便而有效的,机器人也能够更加智能化的运行,如图3所示。
图3 智能避障最优轨迹图Fig.3 Optimal trajectory diagram of intelligent obstacle avoidance
在速度(v,w)的二维空间中存在无穷多组速度,根据机器人动力学和地图布局约束,从而将采样速度控制在范围内,建立速度采样模型:

机器人存在最大、最小速度限制:
移动机器人受硬件平台限制,存在最大加速度得动态窗口,该窗口内的速度值即机器人能达到的实际值:

we[w.-a,Δt,w.+a3Δ]其中v.和w.是当前速度状态,a1是最大线加速度,a2是最大线减速度,a3是最大角加速度,a4是最小角加速度。
建立最大减速条件下防碰撞约束:
dist(v,w)采样的众多速度状态量中,定义评价函数选择最优轨迹:

利用方位评价函数来评价轨迹末端方向与目标在当前速度状态下的角度差。dist(v,w)表示从最近的障碍物到机器人当前轨迹的距离[8]。如果现场环境中有障碍物,路径就会被丢弃。velocity(v,w)用于评价速度大小,并选择运动时间短、速度变化小到目标点的速度值。
3 结论与展望
基于SLAM算法建图与定位构建系统模型,激光SLAM采用Catgraph算法,视觉SLAM分别部署了ORB和RTAP-map,双雷达拼接提供更为丰富的特征信息,并提高了机器人的视觉避障能力,自主导航算法依托Move Base导航框架,采取最小Snap优化,完成全局最优顺滑轨迹优化,并配合DWA算法完成动态避障功能,在ROS通信框架之下,实现自定义轨道坐标和固定坐标点巡航外部端设计部分,结合局域网下具有控制机器人运动,建图导航以及发布相关信息的综合功能。
引用
[1] 李清东,卢鹏举,潘巧波,等.数字化电厂智能巡检技术在风电场的应用[J].黑龙江电力,2021,43(4):302-306.
[2] 孙强.机器人技术在智慧电厂中的应用[J].电子技术,2021,50(03):176-177.
[3] 王红妮,周宏斌,张泽巍,等.智慧电厂背景下设备巡检系统的设计与实现[J].设备管理与维修,2021(10):101-103.
[4] 郑卫东,韦玉华,李捍华,等.基于图像识别的电厂关键设备周期性巡检方法[J].电子设计工程,2021,29(8):63-66+71.
[5] 车震海,郭南,梁新玉,等.基于互联网的电厂热工巡检系统研究[J].沈阳工程学院学报(自然科学版),2018,14(4):367-370.
[6] 张振聪.数字化电厂智能点巡检系统的应用研究[J].价值工程,2019,38(35):286-287.
[7] 苏晖,刘鲁京.电厂智能巡检机器人导航技术研究及应用[J].电子测试,2016(23):40-41.
[8] 潘龙.基于二维码的智能巡检系统在电厂的应用[J].现代信息科技,2020,4(15):114-118.
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
军事文摘(2018年24期)2018-12-26
通信电源技术(2018年3期)2018-06-26
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
