
无霍尔无刷直流电机电流环系统设计与实现
2022-06-09 12:40中国科学院长春光学精密机械与物理研究所张立文郭同健付云博曹策
数字技术与应用 2022年5期
中国科学院长春光学精密机械与物理研究所 张立文 郭同健 付云博 曹策
无霍尔传感器无刷直流电机具有体积小、成本低、寿命长、安装简单等优点,在工业自动化、军工航天等众多领域中应用越来越广泛。电流环是无刷直流电机控制中关键的一环,对于维持恒定力矩输出起到重要作用,如何设计出动态和稳态性能好、带宽高的数字电流环是无刷直流电机控制的重点。本文设计了一种基于DSP2812数字信号处理器的无霍尔无刷直流电机电流环控制系统,重点解决无霍尔无刷直流电机电流环设计中的电角度精确标定、电流环建模与参数设计、系统软硬件实现等内容,在实际工程项目中取得了良好的应用效果。
无刷直流电机(BLDC)是指无电刷和换向器的电机,具有体积小、重量轻、调速性能好、寿命长、效率高等优点,应用越来越广泛。相比传统的有霍尔传感器的无刷直流电机,无霍尔无刷直流电机具有体积小、成本低、可靠性高等优点,电机线由8根减少到3根,安装简单,已被广泛应用于在工业自动化、军事对抗、航空航天等众多领域。电流环是无刷直流电机控制中的关键一环,电流环主要用于调节电机电流,维持恒定力矩输出,减小转矩波动,还具有限制启动电流以提高系统安全性以及增加系统的抗干扰能力等作用。本文从工程应用角度出发,设计了一种基于DSP2812数字信号处理器的无霍尔BLDC电流环控制系统。
1 电流环控制算法设计
1.1 矢量控制策略
无刷直流电机控制采用SVPWM空间矢量控制,空间矢量控制法将360°的电压空间分为6个扇区,利用6个基本有效矢量和2个零量的不同组合可合成360°内的任何矢量[1],电压空间矢量图如图1所示。当采用SVPWM空间矢量控制时,需要进行空间坐标变换(即Clarke和Park变换,及相应的反变换),实现abc三相静止坐标系、α-β两相静止坐标系、d-q两相旋转坐标系之间的坐标转换,坐标变换需要用到电角度,电角度θ就是随时间变化的d轴和α轴之间的夹角。

图1 电压空间矢量图Fig.1 Voltage space vector diagram
无刷直流电机的电流环控制采用矢量控制策略,其工作原理如图2所示。采样得到的电机三相电流Ia、Ib、Ic经过Clark变换和Park变换后得到旋转坐标系下的Iq、Id,Iq和Id分别与输入的电流设定值相减计算得到电流误差值,q轴电流误差值经q轴电流调节器校正后得到q轴电压Uq,d轴电流误差值经d轴电流调节器校正得到d轴电压Ud,然后Uq和Ud进行反Park变换得到两相静止坐标系下的Uα和Uβ,Uα和Uβ再经过SVPWM算法得到Ua, Ub, Uc,从而控制无刷直流电机转动[2]。
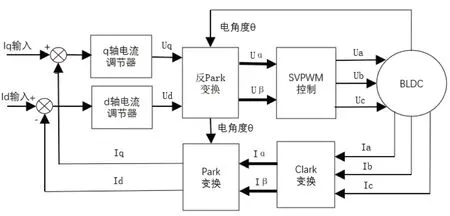
图2 电流环工作原理图Fig.2 Working principle diagram of current loop
系统控制采用的无刷直流电机的主要参数如表1所示。
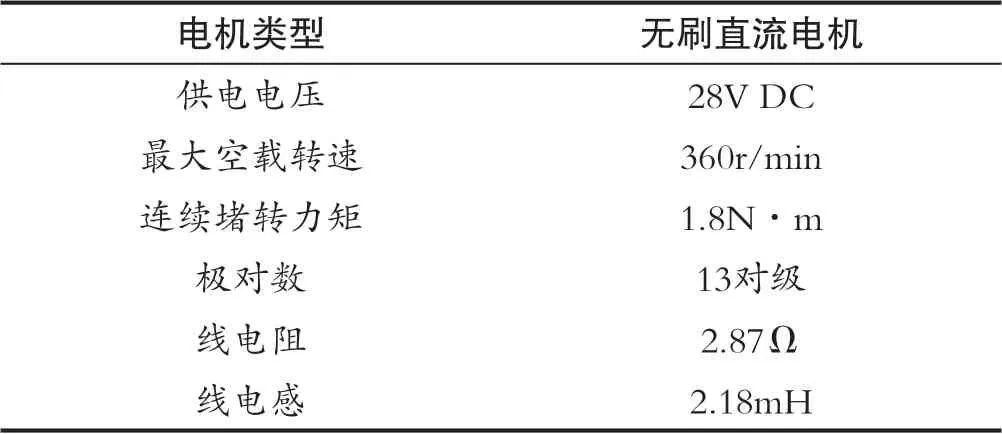
表1 电机参数表Tab.1 Motor parameters
1.2 机械角度和电角度标定
电流环矢量控制中,坐标转换需要用到电角度,因此电角度的标定对于无刷电机的正常运转至关重要。无刷直流电机的电角度和机械角度之间存在以下关系:
电角度 = 机械角度×电机极对数
对于有霍尔元件的无刷电机,电角度通过霍尔传感器检测得到,而对于无霍尔传感器的无刷电机,电角度标定多采用反电动势法[3]。反电势法主要是通过检测电机的反电动势来获取转子的位置信号,检测精度不高,当PWM占空比很小时,电机转速较低,反电动势也会很小,因此检测的精度会受到限制。
本文采用外接编码器的方式精确标定电机电角度,非常适合于具有编码器的高精度定位的应用场合。具体标定方法是按照空间电压矢量状态100、110、010、011、001、101的顺序给电机的三相依次通电,电机会每次转动一定角度,记录下每一步机械角度(编码器值)的角度变化,再根据电角度和机械角度的对应关系,即可推算出电角度值,为提高标定精度,可采取多点测量取平均值的方式进行标定处理。
1.3 电流环控制参数设计
无刷直流电机的电流环简化动态结构图如图3所示。
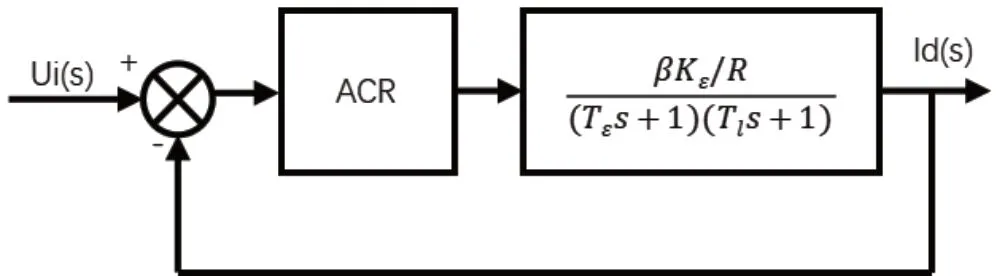
图3 电流环动态结构简化图Fig.3 Simplified dynamic structure diagram of current loop
其中,Tε为小时间常数的近似和,Tl为电机的电气时间常数,ACR为电路环调节器,ACR调节的目的是消掉控制对象中的大时间常数极点[4],将系统校正成典型I型系统。
由于q轴和d轴电流环控制方法类似,本文以q轴电流环为例进行说明。根据电机参数,经计算及实际系统参数辨识可得到电机q轴电流环被控对象的传递函数为:

将q轴电流环调节器的传递函数设计为:
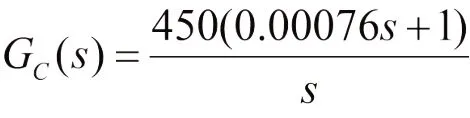
根据Matlab软件仿真,q轴电流的开环频率特性曲线如图4所示,开环截止频率为1370rad/s,相位裕度为74.7°,满足系统稳定性要求[5]。
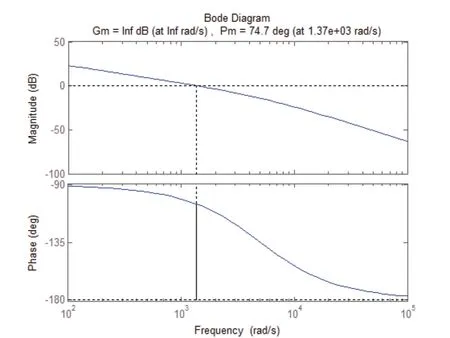
图4 电流环的开环频率特性曲线Fig.4 Open loop frequency characteristic curve of current loop
2 系统软硬件设计实现
2.1 系统硬件设计
系统硬件采用TMS320F2812数字信号处理器作为核心,该处理器内部集成了SCI、ADC、PWM等丰富的增强型外设资源[6],适合用于电机控制系统的核心处理器。系统硬件电路设计的结构框图如图5所示。
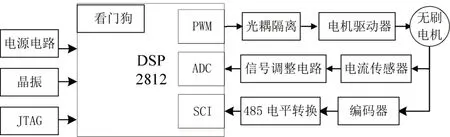
图5 系统硬件电路结构框图Fig.5 System hardware circuit structure block diagram
使用电流传感器采集电机电流,利用DSP处理器内部的AD模块进行采样,利用ADC的外部触发能力进行采样点控制,在PWM载波的起始点和中间点时采样出的电流纹波最小,最接近真实电流,因为Ia+Ib+Ic=0,故直接采样其中两相电流即可,第三相可通过计算得到,另外在电流采集电路设计时,需加信号调整电路进行电压调整,同时为减小电流噪声,增加滤波电容对电流进行滤波。
系统选用18位绝对式光电编码器,利用485串口采集编码器数据,对于具有位置环和速度环的控制系统,编码器值可直接用于位置环的位置反馈值,编码器值经微分测速可用于速度环的速度反馈值。电机驱动器选用三相桥式MOSFET智能集成型控制器,它具有欠压锁定保护、可编程死区时间控制、低电平有效使能关断控制等功能,利用DSP2812内部的PWM模块产生6路PWM信号,PWM信号经光耦隔离后输出至电机驱动器功率驱动器的6个功率开关的控制桥臂,通过控制功率开关的导通与关闭驱动无刷直流电机转动。
2.2 系统软件设计
系统软件基于DSP2812进行设计,采用C语言进行程序编程,软件设计流程框图如图6所示。
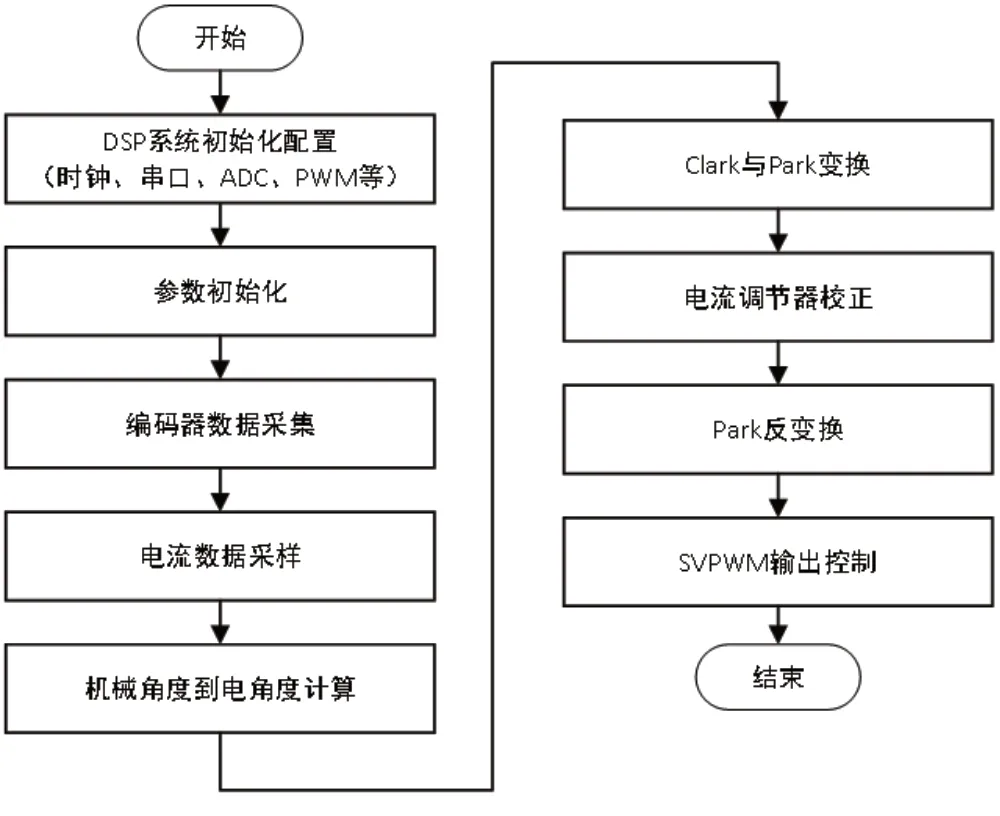
图6 软件程序设计流程图Fig.6 Software programming flow char
电流环采样频率选取为10kHz,电流环的控制算法实现时,需要将电流调节器的模型进行离散化处理[7],电流环调节器的离散化采用增量式PI调节器[8],增量式PI调节器的离散化公式为:

其中,Kp为比例系数,Ki为积分系数。
3 实验结果
完成了系统软硬件设计和系统搭建后,可进行实验验证,电流闭环后对输入值为0.5A的电流跟随效果如图7所示,可以看到,电流环动态跟踪性能良好,超调量小于9%,跟踪精度小于20mA,电流闭环的动态和问题性能良好,电流环闭环带宽可达300Hz。
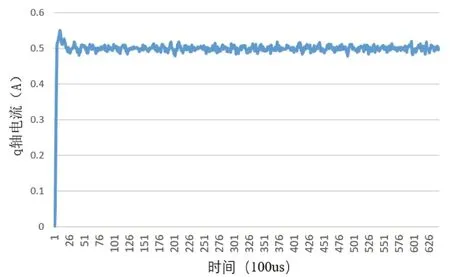
图7 电流跟随实验效果图Fig.7 Effect drawing of current following experiment
4 结语
本文根据实际工程项目需求,设计并实现了一种无霍尔传感器的无刷直流电机电流环控制系统,重点解决了利用编码器进行无霍尔无刷电机控制中的机械角度到电角度的精确标定问题,实现了数字电流环的系统建模和参数设计仿真,实现了SVPWM矢量控制算法进行无刷电机控制,并完成了基于数字信号处理器的无刷电机电流环硬件控制系统设计和软件算法设计,经实验测试和数据分析,系统工作稳定可靠,电流环的动态和稳态特性良好,电路环系统带宽可达300Hz,电机输出力矩平稳,系统已在实际工程项目中得到了很好的应用。
引用
[1] 阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2009.
[2] 龚金国.基于DSP的无刷直流电机数字控制系统的研究与设计[D].西安:西安理工大学,2005.
[3] 陈自然,赵有祥,刘小康,等.基于检测单元的永磁同步直线电机位置检测新技术[J].仪器仪表学报,2020,12(41):48-54.
[4] 谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[5] 李晓东.MATLAB R2016a控制系统设计与仿真35个案例分析[M].北京:清华大学出版社,2018.
[6] 董胜.DSP技术及应用[M].北京:北京大学出版社,2013.
[7] 胡松涛.自动控制原理[M].北京:科学出版社,2007.
[8] 龚金国.基于DSP的无刷直流电机数字控制系统的研究与设计[D].西安:西安理工大学,2005.
猜你喜欢
大电机技术(2022年5期)2022-11-17
成都信息工程大学学报(2018年3期)2018-08-29
电子制作(2017年1期)2017-05-17
电子设计工程(2017年20期)2017-02-10
电子器件(2015年5期)2015-12-29
太空探索(2015年6期)2015-07-12
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年13期)2014-04-04
世界科学(2013年6期)2013-03-11
