
北斗导航干扰监测网定位覆盖分析与验证
2022-06-08 07:09林荣鼎冯晓超
移动通信 2022年5期
林荣鼎,冯晓超
(1.中国电子科技集团公司第七研究所,广东 广州 510310;2.北京卫星导航中心,北京 100089)
0 引言
卫星导航干扰是日益严峻的全球性问题,由于卫星导航系统使用的频段较为拥挤,因此会时常存在有意干扰或者无意干扰。针对重要区域的GPS用频安全,美方推出了“信号哨兵1000”系统,用于GPS干扰监测,一旦检测到干扰信号,即可快速查找定位干扰源,保障重要区域GPS导航系统的安全运行。同样地,在北斗应用中,也出现过很多受扰案例,例如机场航空导航设备(TACAN/DME/ILS等)、某些要地的微波接力机及部分雷达、某些港口的集群系统和数字电视系统,特别是S频段、接近开放的ISM频段,由于频谱使用情况复杂,严重影响了北斗卫星导航系统的正常使用。
通过构建合理、科学部署的北斗导航干扰监测网,对北斗地面站或重要区域的频谱进行无缝监测,以及时发现干扰并预警、定位,从而提升北斗系统的应用效能。目前针对TDOA组网定位的精度分析研究较多,但基于TDOA的分布式频谱监测定位不仅需要考虑TDOA拓扑和算法等对定位精度的影响,还要考虑监测设备对干扰信号感知和复杂无线信道环境下检测能力等的影响,因此更为复杂。本文通过采用传播模型结合试验设备性能分析TDOA多感知节点组网监测定位覆盖范围,并对分析的干扰定位覆盖范围和定位精度进行了实验验证。
1 技术实现途径
1.1 干扰监测实现途径
北斗导航频谱监测需覆盖RNSS频段、遥测频段、RDSS业务频段等,频段范围集中在1—3 GHz,信号带宽在20 MHz以内。因此可选用宽带中频滤波器,高速、16位AD进行中频数字化的实时频谱监测技术,通过快速的傅里叶变换将时域信号转变为频域信号,一次即可得到高带宽的分析频谱,实现快速频谱分析。该技术明显优于传统扫描式接收机,可显著提升应对瞬时突发干扰监测的时效性。
1.2 干扰定位实现途径
北斗导航干扰定位主要针对包括地面和空中的干扰源,考虑时效性及经济性,可采用基于到达时间差(TDOA,Time Difference of Arrival)的分布式组网监测定位技术。其最小基本组成为频谱感知节点,参与定位解算的节点数不低于三个,通过获取信号时差信息及相关峰检测算法,计算得到目标位置信息。各节点之间可利用GNSS接收模块完成时间同步,结合恒温晶振的时间驯服技术,在授时偶然中断时,确保时间同步。
2 监测定位覆盖分析
2.1 感知节点监测覆盖分析
为实现北斗导航干扰的无盲区监测,提高干扰定位精度,通过增加频谱感知节点的数量效果是很明显的。但从经济性考虑,对某一个固定场站而言,频谱感知节点的数量应该控制在一定范围,并通过合理部署,实现干扰监测无缝覆盖和高精度定位。

北斗导航干扰监测覆盖可分为空中和地面两种,其中,空中覆盖以自由空间传播损耗为基准,并在此基础上增加10 dB损耗。计算公式如下:E为频谱感知节点的接收灵敏度,单位dBm;P为干扰源发射功率,单位dBm;L为路径损耗,单位dB;f为干扰信号工作频率,单位MHz;d为干扰源离感知节点的距离,单位km。

接收灵敏度是在给定噪声功率的前提下,衡量接收设备检测信号能力的参数,式(3)为灵敏度与相关参数之间的近似关系式:其中:NF为噪声系数,B为传输带宽,SNR为信噪比。从上式可知,若要提高灵敏度,只有降低噪声系数和带宽,而且带宽对灵敏度的影响远较噪声系数大。已知感知节点接收机噪声系数NF为14 dB,在分析带宽B为25 kHz,信噪比为6 dB时,计算可得:E=-110 dBm。
针对北斗导航信号工作频段,选取1.2 GHz、1.5 GHz、2.4 GHz、3 GHz四个频点,分别在20 W、1 W、10 mW的干扰功率强度时,计算单感知节点的监测覆盖范围,如表1所示:

表1 自由空间传播模型下的单感知节点监测覆盖范围
地面覆盖考虑地面环境对信号的影响,针对1 km高度以下目标,在实际使用中,一般会遇到树木、山坡、建筑物等地面遮挡,同时还需要考虑地球表面曲率和吸收衍射等影响,所以采用Longley-Rice模型对单感知节点进行地面监测覆盖范围计算,设定接收天线架高2 m,发射天线架高3 m,地形起伏高度为10 m进行计算,置信度取97%,得到单感知节点的监测覆盖范围如表2所示:

表2 Longley-Rice模型下的单感知节点监测覆盖范围
通过两种模型的计算对比,采用自由空间传播计算,监测覆盖距离随监测频率及干扰功率的增加而增加;采用Longley-Rice模型计算,考虑地面起伏、遮挡等原因,监测覆盖范围明显减小。因此,考虑地面干扰覆盖部署基本可涵盖空中干扰。
2.2 多感知节点定位覆盖分析
多感知节点定位覆盖主要以地面干扰监测覆盖展开分析,依据TDOA定位原理,至少需要三个感知节点同时监测到干扰信号,即干扰处于三个感知节点监测区域的交叠部分时,可实现对干扰源定位,图1所示深橙色区域即为三重覆盖定位区域(三角形的边长为单感知节点的监测半径d):
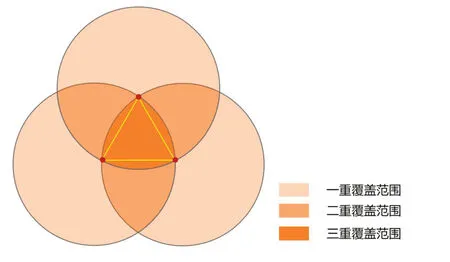
图1 三个频谱感知节点的可定位区域示意图
表3分别列出了1.2 GHz、1.5 GHz、2.4 GHz、3 GHz四个频点,分别在20 W、1 W、10 mW的干扰功率强度时,三个频谱感知节点对于地面干扰源的定位覆盖区域。

表3 三个感知节点定位覆盖区域面积
综合上述分析可知,部署三个感知节点进行地面干扰源定位的覆盖区域比较有限,20 W干扰时的定位覆盖面积为21 km2,但随着干扰信号减弱覆盖面积大幅降低,因此,可通过增加感知节点数量来增大干扰源定位覆盖区域。下面按四个感知节点组网部署形式进行区域覆盖计算分析,四个感知节点典型的组网部署形态包括组成正方形或两个等边三角形部署,如图2所示:

图2 四个节点部署形式
从图2中可明显看出正方形部署时,其三重覆盖区域小于三角形部署,但四重覆盖区域明显大于三角形部署,通过前面分析,监测定位的覆盖随频率增高而减小,因此,在四个节点的定位覆盖计算时,取1.5 GHz和3 GHz两个频点进行计算,三重以上定位覆盖面积计算结果如表4所示。

表4 四个感知节点定位覆盖范围
综合上述分析,感知节点数量及部署形状不同,所能达到的定位覆盖效能也不同,在构建导航干扰监测网时,需根据站点区域面积及地形条件展开感知节点的部署,为达到准确的干扰源定位效果,感知节点部署数量应在4个或以上,并采用三角形的部署形态,以达到最佳监测定位覆盖效果。如果遭遇在定位区域以外影响严重的干扰信号时,为及时准确查找干扰源,应最大程度地扩大监测干扰的定位覆盖区域,可增加频谱感知节点并部署到相关场站周边,扩展干扰监测网的定位覆盖面积。
3 系统组成及应用部署
3.1 系统组成
根据上述干扰监测定位覆盖分析,为充分验证多感知节点组网监测定位覆盖范围,可搭建一套由监测管控中心和四个频谱感知节点组成的北斗导航干扰监测网。其中,监测管控中心作为干扰监测网的中枢,由数据汇集终端和4G网络节点组成,并部署监测管控软件,主要用于对干扰监测网感知节点的统一管理和控制,实现监测网规划、监测任务下发、监测数据汇集、干扰告警及干扰定位等功能;频谱感知节点由频谱感知接收机、宽带监测天线、供电电池和4G网络节点组成,布设在监测区域周边,负责对北斗导航频段1—3 GHz实时监测及频谱数据采集;无线传输网络采用4G无线网络,通过定制VPN(虚拟专网)构建监测数据传输通道,保证部署感知节点和中心的数据传输。系统组成如图3所示:

图3 北斗导航干扰监测网组成图
监测管控软件采用B/S架构,部署于数据汇集终端中,客户端完成用户接口、数据表示及显示逻辑;服务端完成FFT数据、异常I/Q数据、干扰定位等业务处理、数据汇聚核心功能。客户端与服务器软件之间采用WebService进行数据交互。软件界面如图4所示:

图4 监测管控软件示意图
3.2 工作流程
系统工作流程为:制定监测任务计划,通过无线网络将任务自动下发至相应的频谱感知节点,各频谱感知节点接到任务后自动启动监测功能,若发现干扰信号,根据干扰门限参数设置,启动干扰告警,中心根据达到告警门限的告警节点数量,启动干扰信号I/Q数据采集。各感知节点完成数据采集并标记时间戳后,将告警干扰信号I/Q数据回传,中心自动启动最优节点配选机制,开启组网定位及干扰源位置呈现。系统可对任务执行过程进行全程监视,并显示分析处理的结果。工作流程如图5所示:

图5 北斗导航干扰监测网工作流程
3.3 应用部署
根据北斗导航系统的实际应用环境及结合实验测试的可操作性,实验测试环境选择在电磁环境复杂的城市条件下进行,此次实验地点选择在广州市大学城附近。通过在大学城南面邻江两侧分别部署四个频谱感知节点,并按照四个感知节点接近于三角形的覆盖方式进行部署,监测管控中心固定部署于工作室内,通过4G无线网络完成数据交互。各节点采用多模GNSS模块进行时间同步,标称误差为20 ns,考虑到多个站点的GNSS信号误差以及信号采样误差,整体时间误差可控制在50 ns左右,即最小定位误差20 m。系统部署如图6所示:

图6 北斗导航干扰监测网感知节点部署图
为避免干扰实验所在区域的导航系统正常运行,干扰源由导航信号模拟器产生,并偏离正常导航频段。实验中采用频率为1.546 GHz模拟导航信号,信号调制类型为BPSK,信号带宽2 MHz,信号功率20 W,并将干扰源置于车载平台上,车载平台同时配备GNSS接收机,具备位置信息获取能力。
4 实验测试过程及结果
北斗导航干扰监测网定位覆盖实验验证内容包括监测覆盖范围测试、定位覆盖范围及定位精度测试。
第一项是监测覆盖范围测试:将干扰源延大学城外环西路(图7中的红色光路段)向东西方向来回缓慢行驶,以最远感知节点(151号)进行干扰监测,随着向西移动,该感知节点监测信号越来越弱,经多次测试验证,在距离151号感知节点1.73 km处,监测干扰源信号信噪比小于6 dB,此时该距离可作为测试监测覆盖半径d。

图7 北斗导航干扰监测网监测覆盖范围实测图
在20 W干扰功率条件下,将监测覆盖实验测试结果与Longley-Rice模型仿真计算结果进行对比,如表5所示。

表5 监测覆盖范围实验测试与模型仿真对比表
通过表5对比分析,在干扰功率及监测频率一致的情况下,干扰信号带宽不同,监测覆盖半径不同,并随带宽增大而减小。实验测试时,干扰信号带宽为2 MHz,根据接收信号带宽与灵敏度的关系,相对折算到灵敏度值为-91 dBm,与带宽为25 kHz时的灵敏度值-110 dBm相差19 dB。20 W干扰功率下的传播损耗为134 dB,通过Longley-Rice模型仿真计算结果为1.8 km,与实验测试结果1.73 km基本一致,实测数据符合理论仿真模型。
第二项是定位覆盖范围及定位精度测试:根据多感知节点定位覆盖分析,结合实验现场环境条件下的四个频谱感知节点部署位置,并基于实测的监测覆盖半径,确定了定位测试路线,具体点位如图8所示,实测结果如图9所示。

图8 干扰源定位路线图

图9 北斗导航干扰监测网定位覆盖范围实测图
实测结果表明,在4 个感知节点三、四重覆盖范围内均可对20 W 宽带导航干扰信号进行连续有效定位,对于3 个干扰点位的定位效果均达到优于8%×R(CEP0.5,R为作用距离)的精度,其中,点位1、点位2的为四重定位覆盖,其定位精度优于5%×R,定位精度明显高于点位3的三重覆盖定位精度。由于四个感知节点的部署形态非等边三角形,通过比对,该部署形态的最大可定位覆盖范围S(三重、四重)小于等边三角形的定位覆盖范围,即S<3.6 km2,实验测试结果和仿真分析结果对比如表6所示:

表6 四个感知节点监测定位覆盖实测数据与仿真计算结果对比表
通过对四个感知节点组成的北斗干扰监测网的实验测试,其监测、定位覆盖测试结果符合理论分析结果。实验结果表明,干扰监测网的定位覆盖范围与感知节点的部署形态密切相关,实际部署可根据地理地形条件,尽量采用接近于等边三角形方式部署,以达到最优定位覆盖,更好地支撑北斗导航干扰监测网的部署建设。
5 结束语
本文进行了基于传播模型的定位覆盖分析,并通过实验验证了分析的干扰定位覆盖范围和定位精度。采用多感知节点组成的北斗导航监测网网通过合理的、科学的部署方式或适当地增加感知节点数量,可有效提升干扰监测网的监测、定位覆盖范围,达到最优的干扰源监测定位结果。该方法可为北斗导航系统构建地面防护网提供部署依据,并已在某北斗导航地面站成功应用,有效提升了北斗导航系统运行效能。
猜你喜欢
电脑与电信(2018年11期)2018-02-16
电子制作(2017年10期)2017-04-18
职工法律天地·下半月(2016年9期)2016-11-30
电信科学(2016年9期)2016-06-15
中国交通信息化(2016年5期)2016-06-06
现代工业经济和信息化(2016年8期)2016-05-17
电子制作(2016年23期)2016-05-17
科技视界(2016年9期)2016-04-26
数字通信世界(2015年10期)2015-12-21
导航定位学报(2015年2期)2015-06-05
