
基于移动终端的MIMO阵列三维成像技术*
2022-06-08 07:09:36曾昭赫杨明磊曾昆刘楠梁之昱王晓冉陈晓玲王光健
移动通信 2022年5期
曾昭赫,杨明磊,曾昆,刘楠,梁之昱,王晓冉,陈晓玲,王光健
(1.西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071;2.华为技术有限公司,四川 成都 610041)
0 引言
移动通信技术的快速发展使移动基站和终端设备越来越多,通信系统的频段越来越高,如毫米波、太赫兹波段等高频频段[1],这样移动终端上可以布置更多的天线单元,形成更大的天线孔径。无线信号除通信外还可以用于感知成像[2-4],这就使得利用移动终端对周边目标和环境成像成为可能,因此终端感知成像技术也是6G通信感知一体化的一个重要应用方向[5-9]。由于采用高频频段的移动终端阵列相对孔径较大,成像目标距终端较近,成像的场景往往是感知的近场区域,因此本文主要研究如何在移动终端上实现高分辨的近场三维感知成像技术。目前移动终端上常见的光学传感器[10],虽然布置灵活、成像分辨率高,但受光亮强度、烟雾等影响较大,不具有穿透性。而无线电波具有一定穿透性且具有全天时、全天候特点,因此在移动终端(如手机)上通过无线感知成像,可在无线通信的同时实现隐蔽目标探测、弱光或无光环境成像等特殊应用,而且具有较好的隐私保护特性。
目前已有一些对太赫兹、毫米波近场阵列成像的研究,如德国Viktor Krozer教授团队搭建了基于合成孔径技术的太赫兹成像系统[11],该系统可对1.5 m距离内目标进行扫描成像;国内吴俊政等通过仿真实验分析了太赫兹干涉成像时目标场景中存在噪声对成像质量的影响[12];陈建飞等在红外与毫米波成像系统的基础上,提出一种近场太赫兹波被动干涉合成孔径成像系统的设计方案[13],仿真结果表明系统具有较高的空间分辨率;朱荣强等提出了一种适用于单发多收合成孔径雷达成像的频域算法,该方法利用傅里叶变换将回波数据变换至波数域进行扩维,从而在波数域实现了对波前弯曲的精确补偿,因此具有较高的成像精度,并且可以用于近场三维成像[14]。但以上研究主要采用的是合成孔径方式,对实孔径成像分析较少,未考虑孔径渡越等因素影响,为此本文结合移动终端的前视成像应用,研究采用时分MIMO(Multiple Input Multiple Output,多输入多输出)阵列的近场三维成像算法。本文主要工作如下:针对近场三维成像中孔径渡越效应可能造成的结果偏差问题,提出一种可以解决孔径渡越效应的成像方法;在近距离的场景中,根据MIMO阵列能否等效出均匀的虚拟阵列这个问题,提出了一种时分MIMO阵列近场三维成像方法,能够消除孔径渡越效应及栅瓣影响,最后通过设计场景成像仿真验证其有效性。
1 系统模型
假设天线阵元布置在移动终端背面上,发射信号采用调频连续波(FMCW,Frequency Modulated Continuous Wave)信号形式,FMCW信号具有大时宽带宽积、探测精度较高、发射瞬时功率低等特点。由于移动终端的面积有限,而且通常要给摄像头、闪光灯等组件预留空间,为了在有限的空间内获得尽可能大的阵列孔径,系统采用时分MIMO工作模式,雷达发射天线分时发射相同的FMCW信号,通过多个周期信号形成虚拟的大孔径阵列[15]。天线阵列布置方式如图1所示,发射阵元用红色叉号表示,均匀分布在终端平面两侧;接收阵元用蓝色圆圈表示,以均匀面阵形式分布在平面底端中央;成像区域在阵列前方,可划分为若干个像素网格点。
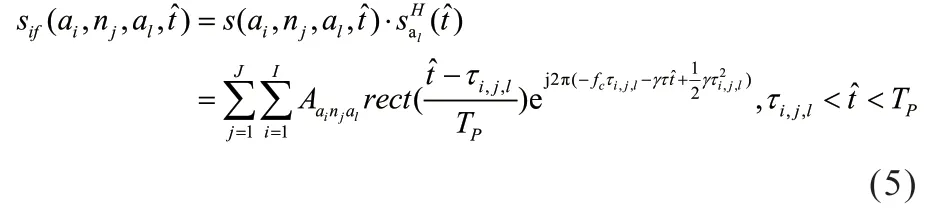
移动终端发射的FMCW信号可表示为:

由发射阵元ai发射,经过像素网格点nj,回到接收阵元al的信号可表示为:



在系统中,接收到的回波信号与发射信号进行混频得到差拍信号:
2 移动终端近场成像原理及分析
2.1 孔径渡越效应问题分析及解决方法
基于阵列的传统实孔径成像算法,是先对回波信号进行混频后得到差拍信号,然后对差拍信号作快速傅里叶变换(FFT,Fast Fourier Transform)得到距离维度信息,通过不同阵元到同一像素网格点的时延得到对应的相位补偿向量,使用补偿向量对各通道同一距离单元上的数据进行补偿求和,从而得到该像素点信号,遍历所有感兴趣的像素点角度完成图像重建。
但上述成像算法的前提是任意两阵元间的波程差不能大于距离分辨单元,否则就会导致不同阵元到达阵列等相位面的时间不同,造成成像结果的偏差,产生的孔径渡越效应,影响成像效果[19]。
为了解决孔径渡越效应对成像结果的影响,我们通过阵元在每个采样时刻到同一像素网格点的时延得到对应的相位补偿向量,然后对不同通道的差拍信号进行补偿并求和,再对补偿后的信号作FFT得到目标的距离维度信息。其中,划分的网格点nj对应的相位补偿向量表示为:
其中,1≤i≤NTx、1≤l≤NRx,NTx、NRx分别表示发射和接收阵元的总个数,表示发射阵元为ai、聚焦点为网格点nj、接收阵元为al时对应的相位补偿值,且:


与传统方法相比,优化后的方法对差拍信号进行补偿可以获得像素网格点到参考阵元的实际距离,从而得到正确的距离单元编号,避免了孔径渡越效应的影响。
2.2 近场条件下的MIMO等效虚拟阵列
实孔径成像的角度维分辨率取决于阵列孔径的大小,如果移动终端背面天线布置成半波长均匀面阵形式,则会导致阵元和通道数过多,成本和能耗很高且在移动终端上难以实现,因而我们采用MIMO阵列形式,通过构建虚拟阵列方式来扩大阵列孔径,提高成像分辨率,同时减少成像所需的阵元数和通道数。但由于此时属于近场成像,虚拟阵列的构建不同于传统MIMO阵列,为了便于研究,本节用线阵的形式进行说明。
如图2所示,若MIMO阵列为2发4收的均匀线阵,接收阵元间隔为半波长,发射阵元间距为2倍波长,在远场条件下可以等效为1发8收的均匀虚拟线阵[20],即要求R1与R2的距离差和R3与R4的距离差相同。但在近场条件下,两者的距离差并不相同,故无法等效为均匀的虚拟线阵。因此需要分析两者之间的相位关系才能得到虚拟阵列的精确导向矢量,具体分析如下:
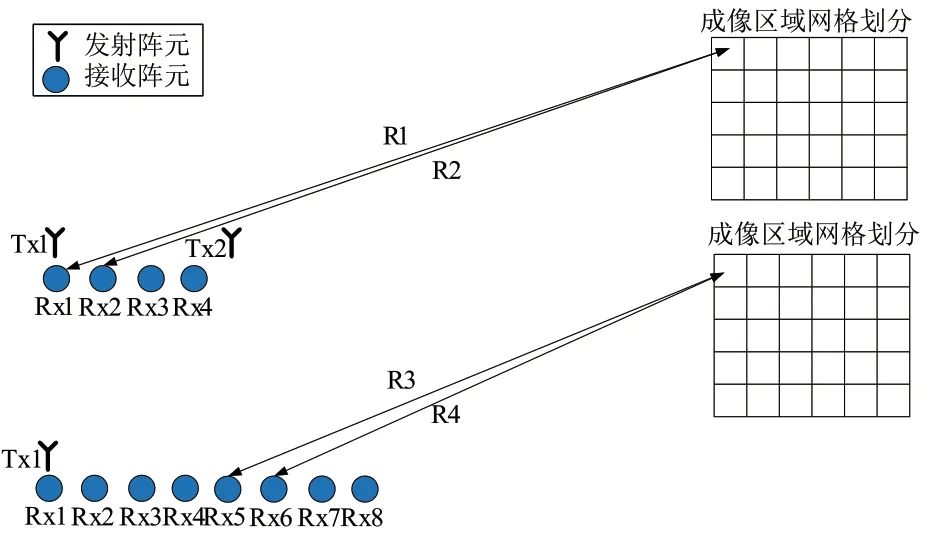
图2 近场条件下时分MIMO线阵及其等效阵列示意图
假设MIMO阵列有2个发射阵元,4个接收阵元,则根据几何关系计算时延差可得接收阵列的导向矢量为:

其中Δt2~Δt4表示第2~4个阵元相对于参考接收阵元的时延差,包含网格点相对于阵列的角度信息θ。
同理,经过计算可得阵元Tx2到阵元Tx1的相位差为,那么当阵元Tx2发射信号时,接收阵列的导向矢量可以表示为:

其中ΔT2表示第2个发射阵元相对于参考发射阵元的时延差。
于是该MIMO阵列对应虚拟阵列的导向矢量为:

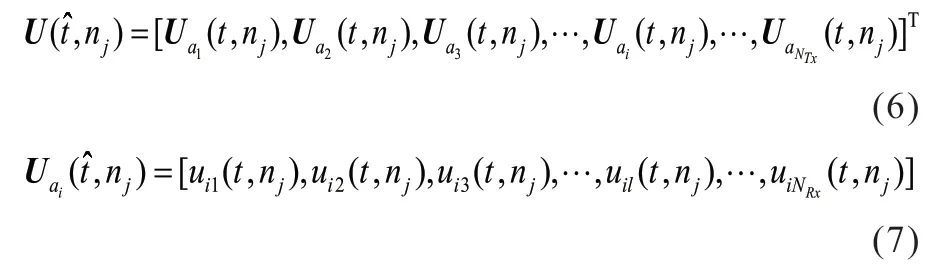
利用式(13)所示导向矢量与式(5)的回波信号进行MIMO阵列的近场波束形成,此时阵列接收信号表示为:

将每个阵元接收到的信号乘以对应接收通道权重wi后求和,实现波束形成,其接收信号为:

2.3 MIMO阵列近场三维成像算法流程
结合上述MIMO阵列近场波束形成的过程,以及根据2.1节孔径渡越效应问题的解决方法,本文所提的近场三维成像算法流程为:
S1:将成像区域划分为若干像素网格点,并计算不同阵元到不同网格点的时延τi,j,l;
S3:根据所述虚拟阵列的相位补偿向量对所述虚拟阵列的差拍信号进行补偿;
S4:对所述网格点进行相干叠加并加窗抑制旁瓣,得到该像素网格点处的信号值;
S5:重复步骤S2-S4,遍历整个成像三维区域,以完成图像的重建。
3 仿真结果与分析
为验证2.3节所提算法的有效性,通过仿真对模拟场景进行三维成像。发射信号载频选用300 GHz,波长λ=1mm,带宽10 GHz,调频周期为100 μs,采样率为7 MHz。根据如图1所示的终端模型,布置发射阵元水平方向间隔为75.5 mm,垂直方向间隔10.5 mm,共30个阵元均匀分布在终端左右两侧;接收阵元水平、垂直方向间隔均为λ/2=0.5mm,以面阵形式位于终端底端。则MIMO阵列可虚拟出来的均匀满阵孔径大小为150 mm×150 mm,虚拟阵列的远近场的分界线为2L2/λ=2×1502mm2/1mm=45m,成像网格点的排布是按照三维坐标轴一层一层排布的,波束扫描范围设置如表1所示:

表1 像素网格扫描点范围设置
场景目标设置如图3所示,有一个0.5 m高的圆柱体,因为天线阵列位于该圆柱体的正上方,圆柱体侧面都会被遮挡住,所以表示的时候等效成了在-4.5 m处的一个圆面,在-5 m处的平面为背景面,两者的散射系数不同。阵列位于圆面的正上方,其参考阵元位于坐标为(0,0,0)的位置。
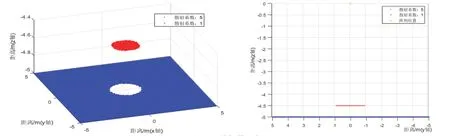
图3 三维场景示意图
图4给出了MIMO阵列的成像结果,由斜视图可知,在阵列的近场范围内,圆面所在的-4.5 m成像结果上显示出了圆的形状,在-5 m的背景面上圆面的投影能够正确显示出来。通过侧视图可以明显看出,因为受到从副瓣进入的能量影响,圆面的两边出现了能量较高的旁瓣,加窗之后,从副瓣进入的能量被削弱,成像结果的旁瓣被抑制,形状及幅值能够与实际情况正确对应,说明2.3节所提三维近场成像算法通过相位补偿避免了孔径渡越效应对成像结果的影响,并且使MIMO阵列在近场条件下能够等效为大孔径均匀面阵,可以满足移动终端近场成像的需求。
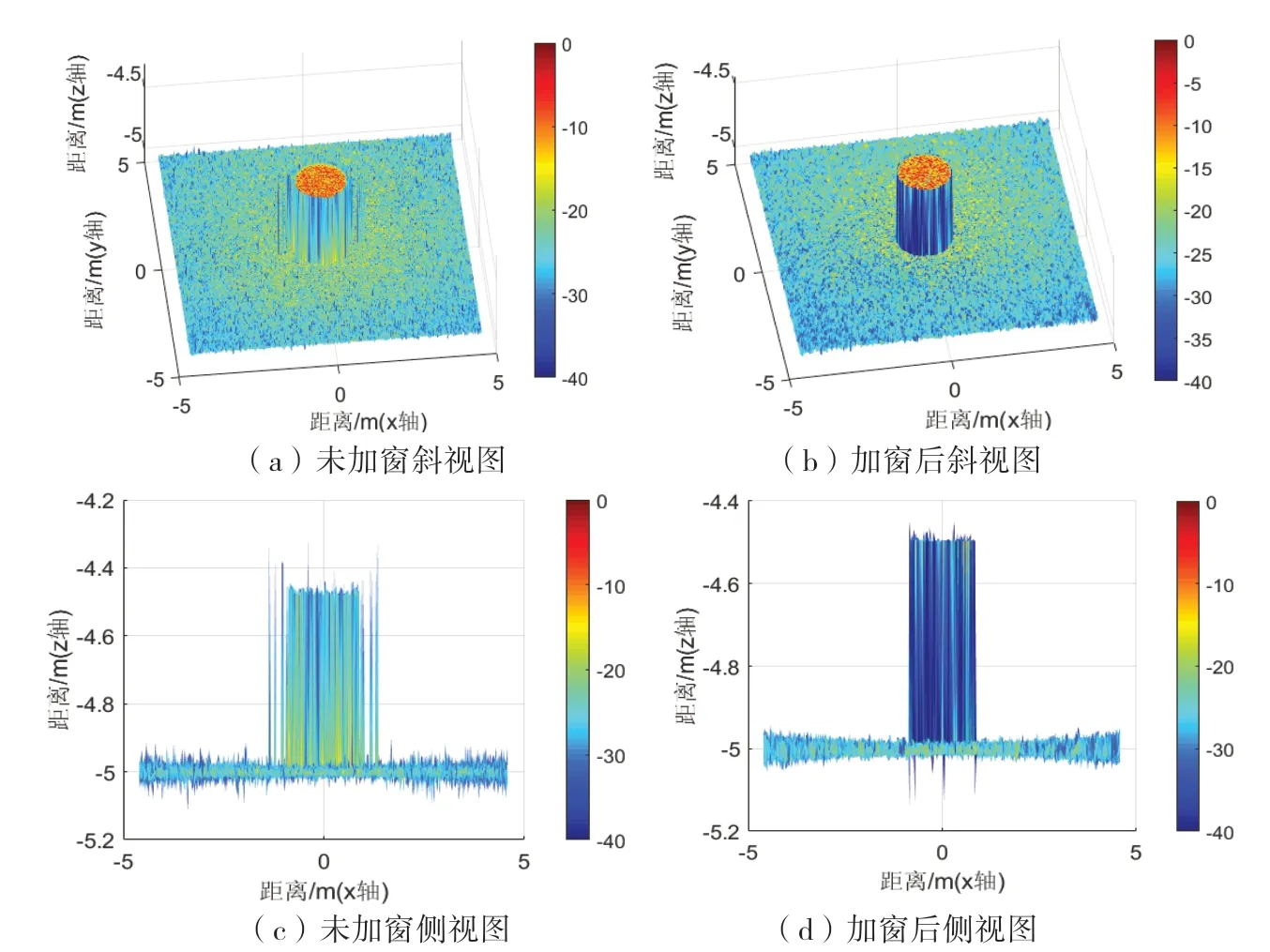
图4 三维场景成像结果图
4 结束语
本文针对未来采用太赫兹波段的移动终端,提出了一种前视近场三维成像方法,解决了近场条件下的孔径渡越问题,分析了近场条件下的MIMO等效阵列问题。仿真实验结果表明,设计的MIMO阵列能够虚拟出大孔径阵列以提高成像分辨率,所提成像算法可以避免孔径渡越效应和栅瓣的影响,获得良好的成像效果。本文研究的移动终端近场三维成像技术,为未来6G通信感知一体化趋势下的目标和环境感知重构方向奠定了良好基础。
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:48
探索科学(学术版)(2019年5期)2019-07-13 03:08:23
电子制作(2019年23期)2019-02-23 13:21:12
测控技术(2018年6期)2018-11-25 09:50:10
中国测试(2018年10期)2018-11-17 01:58:50
西南石油大学学报(自然科学版)(2018年2期)2018-06-26 06:19:12
雷达学报(2017年1期)2017-05-17 04:48:53
光学精密工程(2016年1期)2016-11-07 09:01:53
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
电测与仪表(2016年17期)2016-04-11 12:38:28
