
通信感知一体化关键技术与挑战
2022-06-08 07:09姜大洁姚健李健之丁圣利杨坤袁雁南陈保龙秦飞
移动通信 2022年5期
姜大洁,姚健,李健之,丁圣利,杨坤,袁雁南,陈保龙,秦飞
(维沃移动通信有限公司,北京 100015)
0 引言
6G 将实现“自由连接的物理数字融合世界”的愿景[1]。6G 不仅需具备通信能力以实现物理与数字融合世界的自由连接,还需具备对物理世界的感知能力以构建对应的数字世界,并且具备计算能力以提供物理与数字融合世界所需的数据处理,最终实现物理世界和数字世界的高效互动与高度融合。无线通信和无线感知均基于电磁波理论,电磁波信号在人类活动的高价值场景几乎实现了无缝覆盖。在发送端对电磁波信号进行调制,使得电磁波承载信源信息,而电磁波信号在传播过程中会受到无线环境的影响,即电磁波信号受到环境调制因此也承载了环境信息。接收端通过对电磁波信号的分析,不仅能够得到所承载的信源信息,还能够提取出反映传播环境特征的感知信息,也就是说,电磁波信号具有与生俱来的通信与感知双重功能,这就使得通信感知一体化(简称通感一体化)成为可能。相比感知与通信分离的系统,通感一体化系统能够带来许多优势,例如节约成本、减小设备尺寸、降低功耗、提升频谱效率、减小通信和感知之间的互干扰等。
随着6G 系统的频段向毫米波甚至太赫兹扩展,其频段具有大带宽和高穿透能力的特点,同时将来更大规模天线和更密集网络的部署,将共同推动6G 提供更高感知精度与更高感知分辨率的感知服务。通感一体化将是6G的标志特征之一。本文首先介绍了通感一体化的场景与性能指标,然后介绍了通感一体化的关键技术,最后给出了通感一体化在性能评价指标、信道建模与仿真方法、硬件非理想因素的影响、隐私与计费等方面的挑战。
1 通感一体化的背景
1.1 感知的分类
根据感知设备(指具有感知能力的设备,例如传感器等)与感知目标或感知对象是否分离,感知可以分为非接触式感知和接触式感知。接触式感知需要在感知目标上安装温度计/湿度计/气压计/陀螺仪/加速度计/重力传感器等传感器来采集特定感知信息;非接触式感知需要光、声或无线电波等作为感知传导的媒介,因此可以分为光感知(通过可见光、红外线等作为媒介进行感知的普通摄像头,如红外摄像头、激光雷达等)、声感知(例如通过机械波、超声波进行感知的声呐)和无线电波感知(例如毫米波雷达等)。图1 总结了不同的感知类型:

图1 感知的分类
另外一种分类方式是将感知分为非射频感知和射频感知,其中非射频感知包括接触式感知、光感知和声感知。非射频感知在某些方面存在一定局限性,例如基于可见光的普通摄像头系统往往依赖于光线条件或视距条件,尤其在室外场景受天气情况影响严重,且存在隐私安全问题等。其他特定传感器需要安装在感知目标上,存在部署维护与设备供电的问题,在便利性和成本方面有一定局限性。射频感知即无线电波感知。无线电波信号在传播过程中受到周围环境的影响,信号的幅度、相位等特征发生了变化,接收端通过对无线信号特征变化的分析,不仅能够得到无线信号承载的发送端信息,还能够提取出反映传播环境特征的信息。射频感知支持感知设备与感知目标的分离,相比非射频感知,其受天气和光线条件影响较小,感知范围相对更大,灵活性更高,在隐私与安全方面相比摄像头更具优势。射频感知与非射频感知互为补充。6G 将综合利用包括射频感知在内的不同类型的感知来采集各类数据,以实现对物理世界更便捷更高效更精确的数字化构建。
1.2 通感一体化及融合级别
在过去,大部分场景下无线通信系统和感知系统被独立研究。事实上,无线通信和射频感知不论工作原理、系统架构还是频段,均存在着不少相似之处。首先,通信系统与感知系统均基于电磁波理论,利用电磁波的发射和接收来完成信息的传递和获取;其次,通信系统与感知系统均具备天线、发送端、接收端、信号处理器等硬件,在硬件资源上有很大重叠;再次,随着技术的发展,两者在工作频段上也有越来越多的重合;另外,二者在信号调制与接收检测、波形设计等关键技术上存在相似性。面向通信感知两种功能的一体化设计已逐渐成为趋势。
通感一体化系统是指在同一系统中通过频谱共享、硬件共享、信号共享等方式,在进行信息传递的同时,能够通过无线信号的发射和接收,感知目标物体的方位、距离、速度等信息,或者对目标物体、事件或环境等进行检测、跟踪、识别、成像等。此时的无线信号既是通信信号,又是感知信号。通感一体化系统相比通信和感知分离的系统,能获得融合增益与协作增益[2]。从通信和感知的交互及相互影响的角度分析,通感一体化包括如下不同程度的融合级别[3]:
(1)共存:通信系统和感知系统共享空时频资源,但不进行信息共享与互干扰消除,不考虑物理集成设计和优化,在达不到完美隔离的情况下,两系统相互之间会产生干扰,导致各自的性能下降。
(2)合作:通信系统和感知系统通过共享部分信息,达到减小彼此之间干扰的目的,进一步地,利用彼此的信息交互实现更加丰富的功能或者增强系统本身的通信性能或感知性能。
(3)联合设计和优化:在系统设计时将通信和感知联合考虑,从硬件架构、波形设计、协议设计、接收信号处理等各个角度实现通信和感知功能的深度融合,提升频谱使用效率,优化系统整体性能。
2 通感一体化的场景与性能指标
2.1 感知的对外服务和对内服务
感知的服务对象可以是6G 系统自身,也可以是6G系统以外的其他对象。以服务对象的范畴来区分,感知可以分为对外服务(服务对象是6G 系统以外的其他对象,即network for sensing)和对内服务(服务对象是6G 系统本身,即sensing for network)两种。
关于感知的对外服务,按照感知的覆盖范围,可以将典型的感知用例和应用场景进行分类,具体用例如表1 所示。

表1 典型感知功能与应用场景
为支持表1 中的各种感知用例,感知信号接收节点的每个天线接收感知信号发送节点发送的一个或多个感知信号,根据接受到的感知信号得到信道响应;然后根据接收信号或信道响应得到基本测量量,其中基本测量量包括时延、多普勒、角度、强度,及其多维组合表示。感知信号的接收节点或者感知信息处理节点根据基本测量量确定感知目标的基本属性/状态,具体包括距离、速度、朝向、空间位置、加速度等;感知信号的接收节点或者感知信息处理节点进一步得到感知目标的进阶属性/状态,具体包括目标是否存在、轨迹、动作、表情、生命体征、数量、成像结果、天气、空气质量、形状、材质、成分等。通过对接收到的感知信号进行不同程度的计算或处理可以获得不同层次的感知信息(如表2 所示),进而得到目标感知用例所需的感知结果。值得注意的是,感知信息处理节点可以是终端、基站、核心网网元、或者外部应用服务器等。

表2 不同层次的感知信息
感知的对内服务即sensing for network,其中包括感知辅助通信,其主要目的是通过对周围环境的感知来提升通信系统的性能。感知的对内服务的一些用例包括基于终端定位的波束训练、基于非视距检测的信道估计、基于环境重构的网络优化等方面。对于毫米波通信系统,在码本集合很大的情况下,波束训练过程比较耗时,通过感知来获取终端位置,能够减小波束训练的开销,实现移动场景下快速波束赋形与跟踪。进一步地,对通信目标进行定位和跟踪,并对信道环境中潜在的障碍物进行预测,进而进行针对性的波束切换可以避免因障碍物阻挡导致的通信链路故障。此外,对周围环境不同目标的感知有助于区分视距和非视距信道,弥补基于信道特征进行分析时误识别率高的问题,并且感知获取的信道参数还可以用于提升通信信道估计的准确性。
2.2 感知的性能指标
无线感知的性能指标主要包括感知精度、感知分辨率、感知范围、感知时延、感知更新频率等。各个性能指标的含义参考表3。其中,感知精度与硬件设备性能以及具体资源配置、感知信干噪比等有关;感知分辨率与用于感知的硬件能力以及资源配置有关,例如距离分辨率与感知信号的带宽有关,角度分辨率与天线孔径有关,速度分辨率与感知信号的时域宽度有关。不同感知用例或应用场景对应的感知性能指标的具体含义有所不同,例如,道路车辆监控场景对应的感知精度主要指距离精度、速度精度和角度精度,感知分辨率主要是距离分辨率、速度分辨率和角度分辨率,感知范围则是距离范围、速度范围和角度范围。而呼吸监测的感知用例对应的感知精度为呼吸频率的精度,感知分辨率则为呼吸频率分辨率。
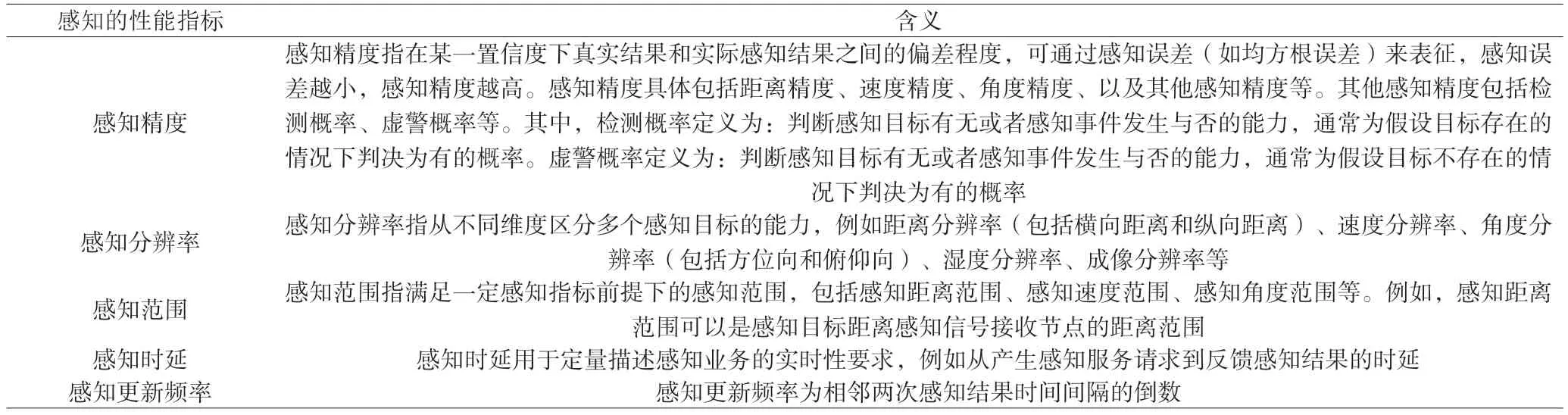
表3 感知性能指标及其含义
此外,从系统效率的角度,感知资源开销、感知功耗等也是需要考虑的指标。
3 通感一体化的感知流程与关键技术
对通感一体化的研究,首先需要梳理通感一体化的几种基本感知方式和感知业务流程,并在此基础上,对通感一体化系统的关键技术进行研究。关键技术具体包括通感一体化波形设计、通感硬件器件共享方案与架构设计、通信解调算法与感知算法联合设计、信号联合检测与干扰消除、MIMO-通感一体化技术、通感一体化与backscatter 和RIS 技术的结合、通感一体化的移动性管理及通感一体化的链路自适应技术等。下面对感知方式与感知流程,以及上述关键技术中的部分技术展开讨论。
3.1 感知方式与感知流程
根据感知信号发送节点和接收节点的不同,分为6种基本感知方式,如图2 所示,具体包括:
(1)基站回波感知,在这种感知方式下,基站A 发送感知信号,并通过接收该感知信号的回波来进行感知测量。
(2)基站间空口感知,此时,基站B 接收基站A 发送的感知信号,进行感知测量。
(3)上行空口感知,此时,基站A 接收终端A 发送的感知信号,进行感知测量。
(4)下行空口感知,此时,终端B 接收基站B 发送的感知信号,进行感知测量。
(5)终端回波感知,此时,终端A 发送感知信号,并通过接收该感知信号的回波来进行感知测量。
(6)终端间旁链路(Sidelink)感知,此时,终端B 接收终端A 发送的感知信号,进行感知测量。
值得注意的是,图2 中每种感知方式都以一个感知信号发送节点和一个感知信号接收节点作为例子,实际系统中,根据不同的感知用例和感知需求可以选择一种或多种不同的感知方式,且每种感知方式的发送节点和接收节点可以有一个或多个。图2 中的感知目标以人和车作为例子,且假设人和车均没有携带或安装信号收/ 发设备,实际场景的感知目标将更加丰富。

图2 通感一体化的6种基本感知方式
考虑到6G 网络架构与功能尚不明确,图3 给出了基于5G 核心网的感知流程。该流程中,为支持感知服务,5G 核心网新增了感知网络功能。感知业务流程的具体步骤如下:

图3 感知流程的示例
1.AMF(Access and Mobility Management Function,接入和移动性管理功能)收到感知服务请求,包括感知目标区域标识/感知目标用户标识、感知服务QoS(Quality of Service,服务质量)需求。感知服务请求可以来自AF(Application Function,应用功能),经NEF(Network Exposure Function,网络开放功能)转发给AMF(即1a),或者来自终端设备UE(1b)。
2-3.AMF 基于感知服务QoS 需求、感知网络功能的能力、感知网络功能的负荷等选择合适的感知网络功能,并转发感知服务请求。
4.感知网络功能根据感知服务请求和RAN node 和/或UE 的感知能力,选择合适的感知方式以及对应的RANNode(例如gNB)和/或UE。
5.感知网络功能与RAN-Node 和/ 或UE 进行感知流程交互,获取感知结果。例如,选择UE 发感知信号基站收感知信号的感知方式,基站将感知信息发送给感知网络功能,感知网络功能根据感知信息计算得到感知结果。
6-7.感知网络功能给AMF 发送感知服务响应(包括感知结果),AMF 将响应转发至感知服务请求方。
3.2 波形设计
波形设计是通感一体化技术研究的重点,其设计思路可以是重用已有通信波形或感知波形,采取时分、频分、空分的方式实现通信和感知波形的分集发送,这种方式资源利用效率较低;也可以通过对已有波形的改造或新波形设计将通信和感知功能集成到一种波形,实现一体化设计。下面对几种常见的可用于通感一体化设计的波形进行分析:
(1)单载波波形。通常与扩频技术结合用于通感一体化设计,例如基于直接序列扩频(DSSS)、时跳扩频(THSS)、啁啾扩频(CSS)的单载波通感一体化波形;扩频技术已经被广泛应用于通信系统中以获得更高的安全性和鲁棒性,为保证感知性能,需要采用自相关与互相关特性良好的扩频序列以及扩频因子以适应不同的感知精度及动态范围。此外,也可以利用单载波通信系统中的导频等训练序列进行感知,例如对于采用SC-FDE(Single Carrier Frequency Domain Equalization,单 载波频域均衡)波形的IEEE 802.11ad 系统,其无线帧中的短训练字段(STF,Short Training Field)与信道估计字段(CEF,Channel Estimation Field)由互补格雷序列组成,用于通信系统帧同步、频偏估计、信道估计,同时可用于雷达系统的目标检测以及测距、测速功能[4]。
(2)多载波波形。OFDM 波形广泛应用于4G/5G移动通信系统,具有较高的频谱效率,可以进行灵活带宽资源分配。OFDM 波形也被引入到雷达系统,进行参数估计时不存在距离-多普勒耦合效应,此外接收端基于傅里叶变换的检测算法简单高效,并且基于OFDM 波形的雷达和通信系统的发射机制高度相似,便于实现通感一体化设计。OFDM 波形同样存在峰值平均功率比高、对多普勒和相位噪声敏感等问题,需要针对性地优化。例如,采用恒包络OFDM(CE-OFDM,Constant Envelope-Orthogonal Frequency Division Multiplexing)设计以改善传统 OFDM 峰值平均功率比高导致的高功率放大器出现非线性失真的问题[5]。另外,有文献考虑利用FBMC(Filter-Bank Multicarrier,滤波器组多载波)作为通信感知融合波形[6]。OTFS(Orthogonal Time Frequency Space,正交时频空)作为潜在的6G 波形,已有研究表明其在雷达估计特性方面性能与OFDM 波形相当,并且由于其循环前缀开销较OFDM 小,因此以更高的复杂性为代价获得更高的频谱效率[7]。
(3)雷达常用波形。例如简单脉冲波形或FMCW(Frequency Modulated Continuous Wave,调频连续波)波形。简单脉冲波形雷达在每个脉冲周期内由占空比决定的时间范围里发射简单脉冲信号,并在脉冲周期的剩余时间上接收回波信号,对回波信号进行处理以进行感知。该波形不要求系统具备全双工能力,实现相对简单,但存在近距离盲区的问题,并且由于其信号在时间上的不连续性,资源利用效率低。简单脉冲波形通常用于远距离的感知应用,例如军事上对于飞行物入侵的监测。FMCW 雷达通过发射频率线性变化的chirp信号并对回波信号进行感知,具有大时宽-带宽积、恒包络、自相关特性好、收发机架构和信号处理流程简单等优点。进一步地,可以通过将通信调制数据加载到FMCW 波形使其携带通信信息实现通感一体化,但是该波形要求雷达系统具有全双工能力,对于收发信号隔离的要求较高,适合于发射信号功率较小的近距离感知,例如汽车雷达。此外,超宽带(UWB,Ultra-Wide Band)波形是指绝对带宽大于500 MHz 或相对带宽大于0.2 的信号波形,通常为纳秒级或亚纳秒级的极窄脉冲波形,通过测量极窄脉冲的飞行时间获得目标的距离信息。该波形系统架构和实现简单、成本和功耗低,通常适用于近距离探测,例如生命体征检测和手势识别等应用。
3.3 MIMO-通感一体化技术
感知的一个典型用例是对感知目标进行方位角测量和定位,这自然与雷达联系紧密。业界先后出现了相控阵雷达和MIMO 雷达。相控阵雷达使用整个天线阵列进行波束赋形,能够形成高增益、高指向性的窄波束,利于提高感知信号的接收功率。然而,相控阵雷达的波束宽度决定了角度分辨率,感知区域较大时需要进行波束扫描,多目标彼此距离小于波束宽度则无法区分,且同时最大可探测目标数量受限。MIMO 雷达的特征是各个天线分别发射相互正交的信号(可通过时分复用、频分复用、多普勒频分复用、码分复用以及上述组合方式)。MIMO 雷达利用波形分集以及虚拟阵列(Virtual Array)特性,能够获得相对于相控阵雷达更高的探测/ 估计分辨率、更高的最大可识别目标数以及更好的杂波抑制能力。MIMO 雷达根据天线部署位置的不同,又可以分为集中式MIMO 雷达和分布式MIMO 雷达。相对于集中式MIMO 雷达,分布式MIMO 雷达可以更好地利用目标的雷达散射截面分集(RCS diversity,Radar Cross Section diversity),提高目标检测性能[8]。但分布式MIMO 雷达面临天线间精确同步的挑战。此外,Phased-MIMO 雷达[9]、Beamspace-MIMO 雷达[10]等新型雷达体制,兼顾相控阵雷达和MIMO 雷达的优势。
未来的MIMO 通感一体化系统将同时具备MIMO 通信以及MIMO 雷达功能,在此称之为MIMO-ISAC 系统。MIMO-ISAC 系统利用了MIMO 雷达中的虚拟阵列的概念来提升感知精度。考虑MIMO 雷达发射阵列天线总数为M,各发射天线位置坐标为xT,m,m=0,1,…,M−1,接收阵列天线总数为N,各接收天线坐标为xR,n,n=0,1,…,N−1。假设各发射天线发射信号正交,则:

其中,φm(t)、φk(t)分别表示第m和第k个发射天线的发射信号,δmk表示狄拉克函数。此时接收机每个接收天线使用M个匹配滤波器分离发射信号,因此接收机总共得到NM个接收信号。考虑1 个远场点目标,则第n个接收天线的第m个匹配滤波器得到的目标响应可以表示为:

其中,ut为1 个从雷达发射机指向点目标的单位向量,α(t)为点目标的反射系数,λ为发射信号载波波长。可以看到,反射信号的相位由发射天线和接收天线共同确定。等效地,等式(2)的目标响应与1 个天线数为NM的阵列得到的目标响应完全相同,该等效阵列称为虚拟阵列,其天线位置坐标为:

图4 给出一个M=3 和N=4 的MIMO 雷达配置以及对应的虚拟阵列示意图。MIMO 雷达实际部署时,通过合理设置发射天线阵元、接收天线阵元的位置,仅仅通过N+M个物理天线,就能构造出包含NM个互不重叠的虚拟天线的阵列。由于虚拟阵列往往能够形成更大的阵列孔径,因此能够获得更好的角度分辨率。

图4 MIMO雷达天线配置及对应的虚拟阵列示意图
随着毫米波以及大规模MIMO 技术的发展,基于数模混合波束赋型架构的大规模MIMO 成为发展趋势,已经广泛用于毫米波5G 通信网络。目前,学界针对混合架构大规模MIMO 的通感一体化研究尚处在探索阶段。面向通感一体化的大规模MIMO 硬件架构与天线阵列设计、面向通感一体化的预编码/波束赋形方案设计等都是有价值的研究方向。
3.4 通感一体化与backscatter技术的结合
根据感知目标上是否安装有信号收/ 发设备,无线感知的感知目标可以分为无源目标或有源目标。实际上,为了增强对无源目标的感知性能,无源目标上可以安装低成本低功耗微小体积的标签设备,例如RFID(Radio Frequency Identification,射频识别)无源标签(Tag)或者backscatter(反向散射)标签。目前学术界已有许多基于RFID/backscatter 的无线感知研究。例如,路边单元通过接收安装在车上的反向散射标签的反射信号,在实现高精度的车辆定位[11]、测速、轨迹追踪的同时,还能够准确区分道路上的不同车辆。通过在医院输液室的每个点滴的滴斗上贴上不同的标签,能够实现同时对多个病人的输液速度以及输液是否停止的实时监测[12]。利用在感知目标周围部署多个标签,能够实现目标朝向识别[13]、目标材料识别以及二维截面成像[14]等。
标签可以安装在感知目标上或者部署在感知目标附近,接收端可以对标签信号进行检测从而完成感知。基于标签的感知具备以下优势:
(1)为不同的感知目标分别安装不同的标签,可以根据不同标签的反射信号特征的不同来分辨不同的感知目标。
(2)标签对信号的反射特性(通过backscatter 方式)相比感知目标本身对信号的反射特性要更稳定,标签的反射信号强度更高,覆盖性能和抗干扰能力更强,可提高感知性能。
(3)标签成本低、功耗低、体积小,在感知目标附近部署多个标签,对多个不同位置的标签的信号进行联合感知处理,可以增大感知范围,提高感知性能。
3.5 通感一体化与RIS技术的结合
未来的通信系统希望利用部署在环境中的RIS(Reconfigurable Intelligent Surface,智能超表面)设备来实现对无线信道的定制化。基于RIS 的无线信道定制化既可以提高通信网络的覆盖性能和吞吐量,也可以增强无线系统的感知性能(即RIS 辅助感知)。在多径环境中,感知信号接收节点需要从接收到的多径信号中提取经过感知目标反射的有用径的信号。基于RIS 的定制化无线信道可以通过波束赋形技术提升感知节点—RIS—感知目标的传播路径的信号能量,增大感知目标的识别机会和感知准确率;或者,可以通过波束抑制方式降低与感知目标不相关的多径的信号强度,从而减小不相关的多径信号对感知性能的影响。此外,RIS 设备还可以与感知节点协作实现感知业务。例如,在有源的感知目标来接收感知信号,以及已知感知信号发送节点的位置和RIS 位置的前提下,可以根据感知信号发送节点—RIS—有源感知目标的信道信息(例如到达角)以及感知信号发送节点—有源感知目标的信道信息(例如到达角)来获得有源感知目标的位置信息。
RIS 辅助感知在部署中面临一些挑战。首先,面向感知的RIS 波束赋形是使能RIS 辅助感知的核心问题。在未知感知目标信息的前提下如何确定RIS 的转发波束?对于有源感知目标,感知目标可以通过基于RIS 的模拟波束训练来确定最优的RIS 转发波束[15]。对于无源感知目标,感知网络可以考虑利用机器学习获取不同RIS 转发波束与感知目标对无线信道变化的相关性来推测感知目标的信息[16]。此外,大规模部署的RIS 会引入基于近场假设的感知场景。传统感知算法通常基于远场假设将接收信号近似为平面波进行信号处理,传统的信道建模和信号处理算法需要进行修正来适配基于近场假设的RIS 辅助感知。
4 通感一体化面临的挑战
4.1 通感一体化性能评价指标
传统通信系统通常以提高吞吐量和传输可靠性为优化目标,关注的性能评价指标主要包括频谱效率、信道容量、信噪比和误码率等。而通感一体化系统则需要考虑通感联合的性能评价指标。在不同的感知应用场景下,通感一体化的性能评价指标要求可能存在不同。
以单一的感知系统为例,雷达波形设计中常用模糊函数衡量波形性能优劣,其定义为信号时间频率复合自相关函数模或模的平方[17],可表征发射波形采用最优信号处理条件下的分辨力、测速测距精度以及杂波抑制能力等性能,是研究雷达信号的主要数学工具。理想的模糊函数呈图钉状,具有单一中心峰值,而在峰值之外的延时多普勒平面上其他能量均匀分布。参数估计领域使用克拉美罗下界(CRLB,Cramer-Rao Lower Bound)表示无偏估计量的方差的下限,反映了无偏估计中能够获得的最佳估计精度。均方误差(MSE)也常被用来衡量参数估计性能,其定义为参数的真实值与其估计值之间误差的平方的均值。此外,通感一体化的研究引入雷达估计速率,用来衡量感知频谱效率[3],作为与通信数据速率相对应的感知指标。
考虑到通信与感知的融合设计,为量化通信速率与感知精度之间的权衡问题,有研究将等效均方误差作为通信感知统一的性能衡量指标,或者将基于速率失真理论的容量失真函数的概念引入到通感一体化系统,以及通过最大化通信和感知的互信息加权和为准则进行波形设计[18-20]。通信与感知系统关注的性能指标侧重点不同,不同感知业务之间的性能衡量方式也可能存在差别,能否找到衡量通感一体化性能的统一评价标准,对于指导一体化波形设计和通感系统设计具有重要意义。
4.2 信道建模与仿真方法
通感一体化关键技术与关键算法的研究与评估,离不开能够真实反映实际系统所经历无线传播环境的信道模型的支撑。面向通信的信道模型主要包括随机性模型(Stochastic Model)、确定性模型(Deterministic Model)以及半确定性模型(Quasi-deterministic Model)[21]。其中,随机性模型兼顾了复杂度和可信度,其信道特征由一组关键信道参数控制,不同参数取值对应不同场景,配置灵活。目前,3GPP 技术报告TR 38.901 中的信道模型就属于随机性模型,广泛应用于5G 的技术评估和标准化。
但是,面向通信的随机性模型无法直接用于通感一体化场景的信道建模。首先,面向通信的信道模型不区分感知目标和非感知目标。对通信来讲,无线信道环境中的反射体导致的反射信号为多径/多径簇(Cluster),对于MIMO 系统的空分复用以及空间分集是有利因素,不需要区分是感知目标还是非感知目标导致的多径/多径簇;而传统的雷达信道一般是稀疏信道,多径数量少甚至不考虑多径,除感知目标外的环境中的其他反射体/散射体导致的反射信号被称为杂波(Clutter),对感知是有害因素。因此,面向通感一体化场景中,需要在一定程度上分别建模感知目标和杂波的多径/多径簇。其次,面向通信的信道模型不支持自发自收的信道建模,不同的感知方式下信道模型需要考虑的情况也有所不同。在自发自收的感知方式下,感知目标的反射、散射特征需要在信道模型中考虑,且回波信号所经历的信道相比通信信道具有两倍的路径损耗以及额外的反射损耗(与感知物体RCS 有关)。
目前,通感一体化场景下是否具有一些新的电波传播机制,针对不同感知用例的信道模型采用随机性模型、确定性模型或半确定性模型,是否存在更准确更高效的信道建模方法等,都是亟需研究的问题。
面向通信的仿真主要包括系统级仿真和链路级仿真。系统级仿真能够建模多UE 在多小区环境中的随机位置,以及不同UE 的链路损耗和小区间干扰,从而得到每个UE 的post-SINR(Signal to Interference plus Noise Ratio,信干噪比),然后根据L2S(Link to System,链路到系统)接口映射得到BLER(Block Error Ratio,误块率),最终计算得到每个UE 的上行或下行吞吐量。系统级仿真不涉及复杂的信号处理过程,复杂的信号处理过程体现在通过链路级仿真提供的L2S 接口数据中。链路级主要面向点对点的单链路的性能评估,建模不同的信号处理模块和对应的信号处理过程。
面向通感一体化的仿真评估,存在以下两种潜在的仿真方法。
(1)不基于感知L2S 的方法。第一步,选择待评估的具体感知用例和场景,确定该场景下的信号发送端、信号接收端、感知目标以及非感知目标的位置/ 特征;第二步,建模信号发送端到接收端之间的信道,包括可能的LOS 径/ 簇,经过感知目标反射的径/ 簇,以及非感知目标反射的径/ 簇;第三步,针对评估的具体感知用例,建模对应的接收端接收信号的感知处理过程,从而得到感知用例的感知性能指标。
(2)基于感知L2S 的方法。方法二的前两个步骤与方法一的前两步相同。方法二的第三步是根据接收端接收的信号来计算感知SINR 或者其他指标(取决于待评估的具体感知用例)。第四步,根据感知SINR 或者其他指标以及感知L2S 接口,得到感知用例的感知性能指标。感知L2S 接口数据需要通过大量链路仿真得到,一种感知L2S 接口数据可表征感知SINR 取值与某种感知用例的感知性能指标大小之间的关系。
方法一的优势在于可以更精确地得到感知性能指标,缺点是对于某些感知处理复杂度较高的感知业务,其感知信号处理的计算量可能较大,仿真时间可能较长;方法二的优势在于其仿真计算量和仿真时长优于方法一,其缺点是目前缺少可靠性高且复杂度可以接受的感知L2S接口模型。感知性能指标不仅取决于感知SINR,还取决于感知目标的位置以及非感知目标(杂波)的特征等,可能导致感知L2S 接口模型过于复杂。未来需要综合考虑上述两种的优势和缺点,制定面向通感一体化的仿真方法,以适配不同感知用例的感知研究需求。
4.3 硬件非理想因素的影响
在通感一体化中,获取精确的感知测量信息尤为重要,而硬件的非理想因素会显著影响感知测量精度。通过检测感知信号来提取准确的信道状态信息(CSI,Channel State Information),是满足感知性能指标的关键,而一些非理想因素导致的CSI 测量误差,会显著影响感知的精度。影响感知性能的硬件非理想因素主要包括:
(1)信号接收功率的不确定性。由于低噪声放大器(LNA,Low Noise Amplifier)、可编程增益放大器(PGA,Programmable Gain Amplifier)等器件的非理想导致实际的增益调整与预期不符,进而使得测量得到的CSI 幅度不准确。
(2)IQ 路不平衡。I、Q 支路器件性能的局限性使得本振信号相位不能保证严格相差90°、两路信号增益存在差异以及存在直流偏置等,进而导致基带信号的正交性被破坏,造成CSI 恶化。
(3)时频同步偏差。收发端时钟偏差、非理想同步等因素带来载波频率偏移(Carrier Frequency Offset)、取样频率偏移(Sampling Frequency Offset)、符号定时偏移(Symbol Timing Offset)等问题,会影响对速度估计的准确性或导致测距模糊。文献[22]归纳了收发端共用参考时钟、对单站中多天线的CSI 进行求商或者共轭乘、多站联合消除定时误差等方法来应对时钟偏差对感知的影响。
4.4 隐私与计费
无线感知相比摄像头感知在视距内的隐私性更好,因为无线感知只能获得感知测量量的图谱而无法获得肉眼可辨识的图片;但另一方面,无线感知相比非射频感知的感知范围更广,例如能感知到视距以外例如门后面人的活动等。因此,安全与隐私是无线感知的挑战之一。安全与隐私不仅需要保护无线感知所获得的感知目标的隐私信息在其所有者的授权范围内使用,还需要保障无线感知服务端到端流程的安全和认证,避免受到攻击或篡改。例如,通过对感知信息进行模糊化处理或者对感知信号进行加密,来保证感知的隐私的安全。
感知计费是通感一体化商业模式的重要组成部分,潜在的内容包括计费对象、计费标准和计费方案,其中计费对象既需要考虑对感知服务需求方的收费,也需要考虑对作为感知信号发送或接收节点(例如终端用户)的付费。包括计费策略在内的灵活合理创新开放的商业模式和生态是通感一体化未来成功商用的重要前提之一。
5 结束语
电磁波信号在人类活动的高价值场景几乎实现了无缝覆盖,电磁波信号天然具有通信与感知双重功能。通感一体化系统通过通信和感知两种功能的频谱资源共享、硬件共享、空口联合设计、信息交互与协作以及协议联合设计,相比通信和感知分离的系统,能获得融合增益与协作增益。本文首先介绍了通感一体化的场景与性能指标,然后介绍了通感一体化的感知方式和感知流程以及通感一体化的关键技术,关键技术包括通感一体化波形设计、MIMO-通感一体化技术、通感一体化与backscatter 和RIS 技术的结合等。最后介绍了通感一体化在性能评价指标,信道建模与仿真方法、硬件非理想因素的影响、隐私与计费等方面面临的挑战。针对这些挑战进行攻关是通感一体化未来规模商用的重要前提。
猜你喜欢
无线电通信技术(2022年3期)2022-05-22
中国特种设备安全(2021年9期)2021-03-02
测控技术(2018年2期)2018-12-09
中华诗词(2018年2期)2018-06-26
中华诗词(2018年1期)2018-06-26
通信电源技术(2016年3期)2016-03-26
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
防灾减灾学报(2015年3期)2015-12-16
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
