
基于PPP-B2b的实时精密单点快速标定技术研究
2022-06-06 02:55王亚锋张全全
现代导航 2022年2期
王亚锋,张全全
基于PPP-B2b的实时精密单点快速标定技术研究
王亚锋,张全全
(中国电子科技集团公司第二十研究所,西安 710068)
随着北斗三号卫星导航系统建设,PPP-B2b信号提供了精密单点定位服务,为实现实时精密单点提供了有效基础。基于PPP-B2b信号研究实时精密单点定位方法,实现了基准点的实时快速标定。同时,通过两点的RTK相对定位结果对实时标定结果进行验证,结果表明30 min内标定结果精度可以达到0.1 m,可以应用于高精度基准位置的快速获取。
实时;精密单点;标定;PPP-B2b
0 引言
通常,有三组数据可用于确定瞬时卫星位置,分别为历书数据、广播星历和精密星历。历书数据和广播星历由卫星传输,精确的星历可从国际全球导航卫星系统服务(International GNSS Service,IGS)等机构获得。
IGS产品的可用性和准确性(IGS2013)如表1所示。表1为IGS提供的事后精密星历产品,可用于获得厘米级的PPP定位精度。从2013年开始,IGS正式提供实时服务(Real-time Service,RTS)。RTS将实时卫星轨道和钟差改正信息采用SSR(State Space Representation)信息格式并基于 NTRIP(Network Transport of RTCM over the Internet Protocol)协议以Internet方式向全球播发,用户可通过网络获得实时的卫星轨道和钟差产品,进行全球范围内的实时精密单点定位技术(Precise Point Positioning,PPP)定位。目前,北斗三号系统已播发用于精密单点定位服务的 PPP-B2b 信号,为实时精密单点定位的研究与应用提供了更多方法。本文基于PPP-B2b 信号,对实时精密单点定位进行研究。
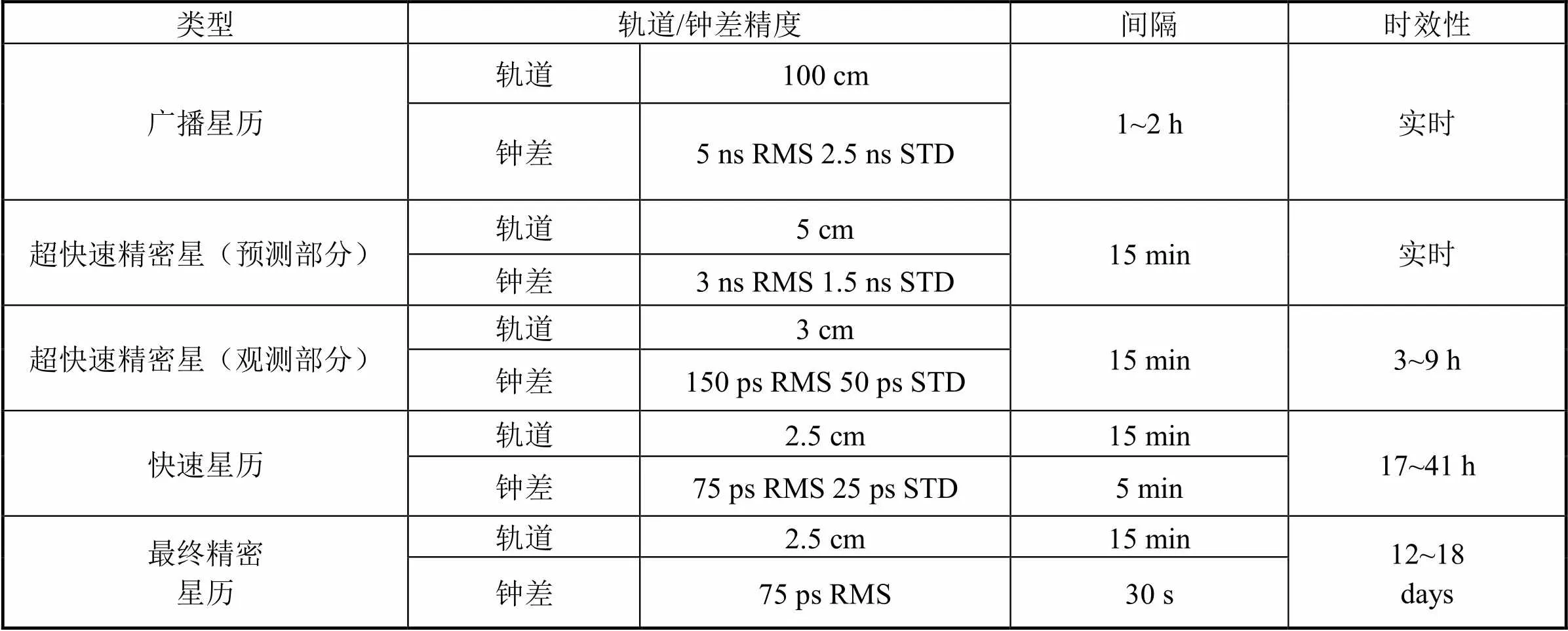
表1 IGS产品的可用性和准确性
1 PPP原理
PPP的关键之处为:
1)在定位过程中需同时采用相位和伪距观测值;2)卫星轨道精度需达到厘米量级;3)卫星钟差改正精度需达到亚纳秒量级;4)需考虑更精确的其他误差改正模型。
需解决的问题包括非差相位整周模糊度确定、高精度的卫星轨道、卫星钟差确定以及高精度误差修正等问题。总体流程如图1所示。
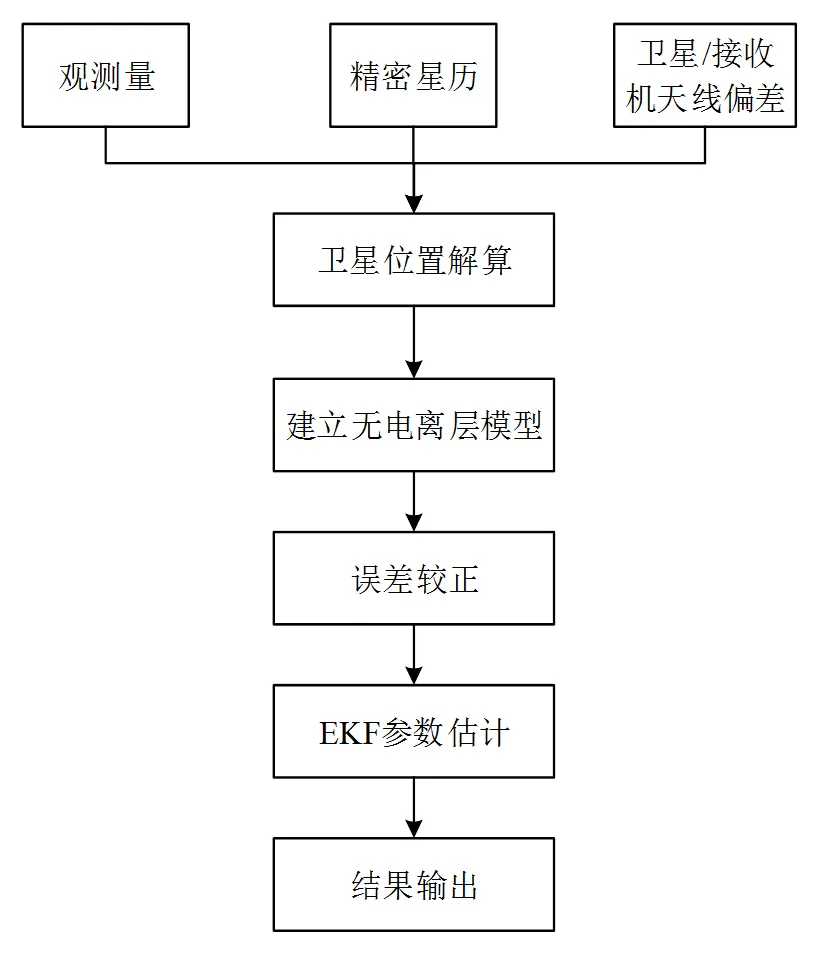
图1 PPP总体流程
1.1 观测量模型
伪距及载波相位观测值可表示为:



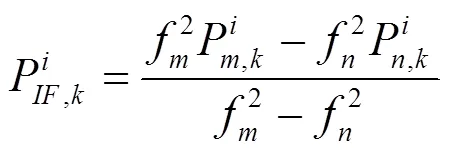
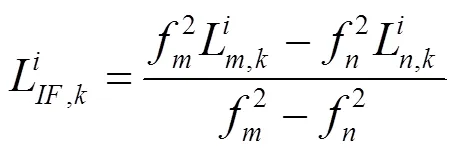
根据电离层对GNSS 信号传播的色散特性消除电离层延迟的影响,在不同频率的伪距与载波相位观测值间分别组成无电离层组合模型。无电离层组合的观测值的计算方法为:


1.2 误差处理及参数估计
由于精密单点定位采用非差观测量,在数据处理过程中,所有误差项都必须考虑。包括接收机钟差、接收天线相位偏差、地球固体潮、海洋负荷潮汐、地球自转、卫星轨道/时钟误差、卫星天线相位偏差、天线相位缠绕、相对论效应以及电离层、对流层延迟、多径效应、测量噪声等。
其中,观测数据的测量误差是影响定位精度和可靠性的重要因素之一。由于具体观测环境具有多变性、接收机内部不稳定、多路径误差影响及电离层闪烁等原因,常会造成观测值中出现粗差或数据不连续等问题,需要进行粗差检测与剔除、接收机钟跳检测与修复、相位周跳检测等。其他系统误差主要通过以下两种方法进行处理:
1)建立较为精确的模型进行修正,对于天线相位偏差、地球固体潮、海洋负荷潮、地球自转、相对论效应等能够精确模型化的误差,可采用现有模型精确改正;
2)对于不能精确模型化的误差,可作为未知参数进行估计(如天顶对流层湿延迟)或使用观测值的线性组合来消除其影响(如电离层延迟)。
卫星轨道误差和卫星钟差可通过精密卫星星历和钟差产品改正,其他误差经处理后,剩余未知参数如接收机位置坐标、接收机钟差、对流层残余误差及无电离层组合模糊度利用扩展 Kalman 滤波参数估计方法进行获取。
2 基于PPP-B2b的精密星历应用
2.1 PPP-B2b星历特征
PPP-B2b 信号在设计上可用于对四大 GNSS 及其组合提供 PPP 服务。对各卫星导航系统,各类改正数相对应的参考电文为:
1)BDS:PPP-B2b 信息用于改正 B1C 信号的 CNAV1 导航电文;
2)GPS:PPP-B2b 信息用于改正 LNAV 导航电文;
3)Galileo:PPP-B2b 信息用于改正 I/NAV 导航电文;
4)GLONASS:PPP-B2b 信息用于改正 L1OCd 导航电文。
目前已播发BDS精密星历电文包括卫星C19~C46(不含C31)。播发信息类型主要为卫星掩码、卫星轨道改正数、用户测距精度指数、码间偏差改正数和卫星钟差改正数。不同数据类型间通过数据版本号IOD进行关联。不同信息类型中的状态空间描述(State Space Representation,SSR)相同时,才可匹配使用;IODP用于卫星钟差改正数与卫星掩码的匹配;IODN用于轨道改正数与基本导航电文的星历匹配;IOD Corr用于轨道改正数和钟差改正数匹配。
实际应用中,轨道改正数及码间偏差改正数发送周期为48 s,有效期分布为96 s、86 400 s,钟差改正数发送周期6 s,有效期12 s。由于在实时接收卫星信号过程中,精密星历滞后于观测量,存在精密星历数据不完整或超出使用有效期的风险,因此对于静态标定可对观测量进行缓存处理,实现精密星历与观测数据的匹配。
2.2 实时精密星历计算及应用
PPP-B2b 信号的时间采用 BDT,坐标系采用 BDCS。具体修正方法如下:
1)卫星码间偏差修正
由于卫星跟踪模式的不同,各观测值都包含一个与信号跟踪模式相关的偏差。同步处理各频率、各类信号时,首先需要消除该偏差,实现各类信号同步处理,其修正算法如式(7)所示:
对于双频无电离层组合,观测值如:

2)卫星轨道改正

3)卫星钟差改正
钟差改正电文包括的参数是相对于广播星历钟差的改正参数。改正后钟差参数表示为:

3 定位性能分析
采用第1节和第2节的方法,使用B3I/B1I观测量数据进行实时精密单点定位,具体流程如图2所示。
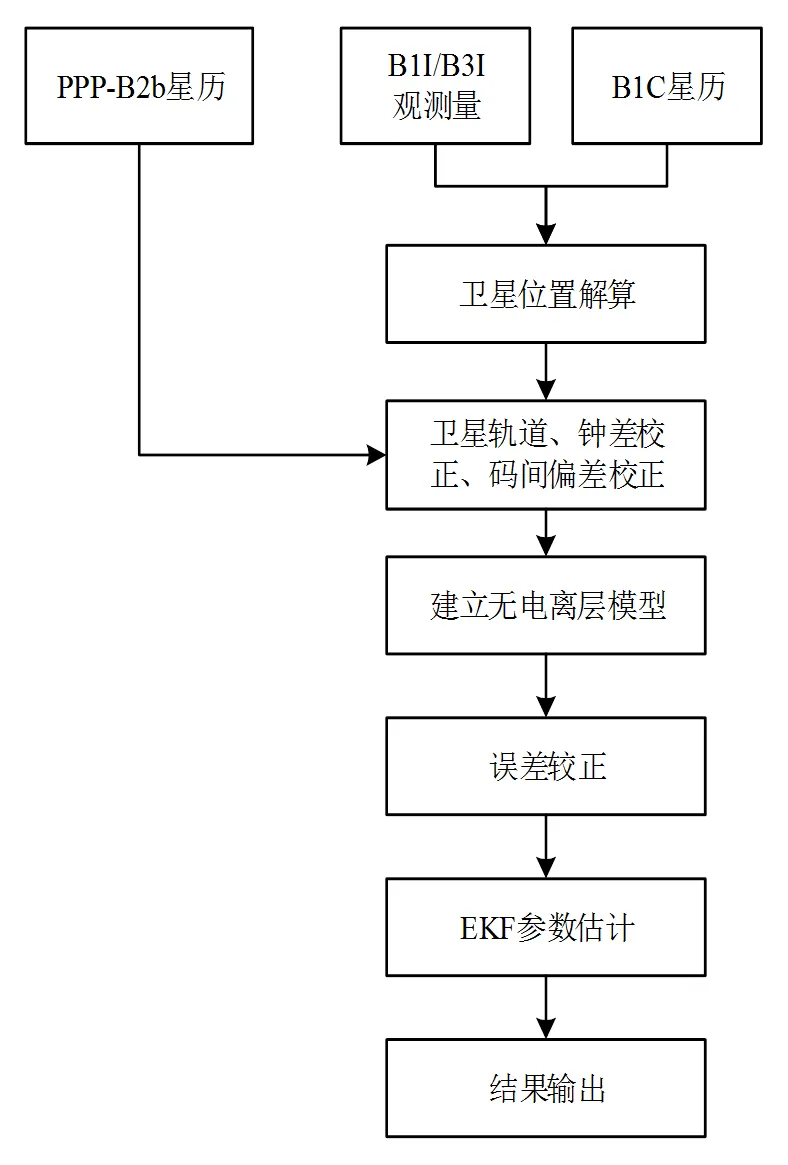
图2 基于PPP-B2b的实时精密单点定位流程
对于精密定位的收敛速度和定位精度性能评估,可采用两种分析方法:
1)存在绝对基准点时,可直接计算定位误差,统计精度;
2)无绝对基准点时,可利用精密定位完成两点位置标定后计算相对位置关系(基线向量),然后通过RTK技术解算基线向量作为基准分析精密定位基线内符合精度,如图3所示。

图3 两点间基线向量
采用IGS发布的事后精密星历标定基准位置后进行精度分析,基于PPP-B2b实时定位误差变化曲线如图4所示。
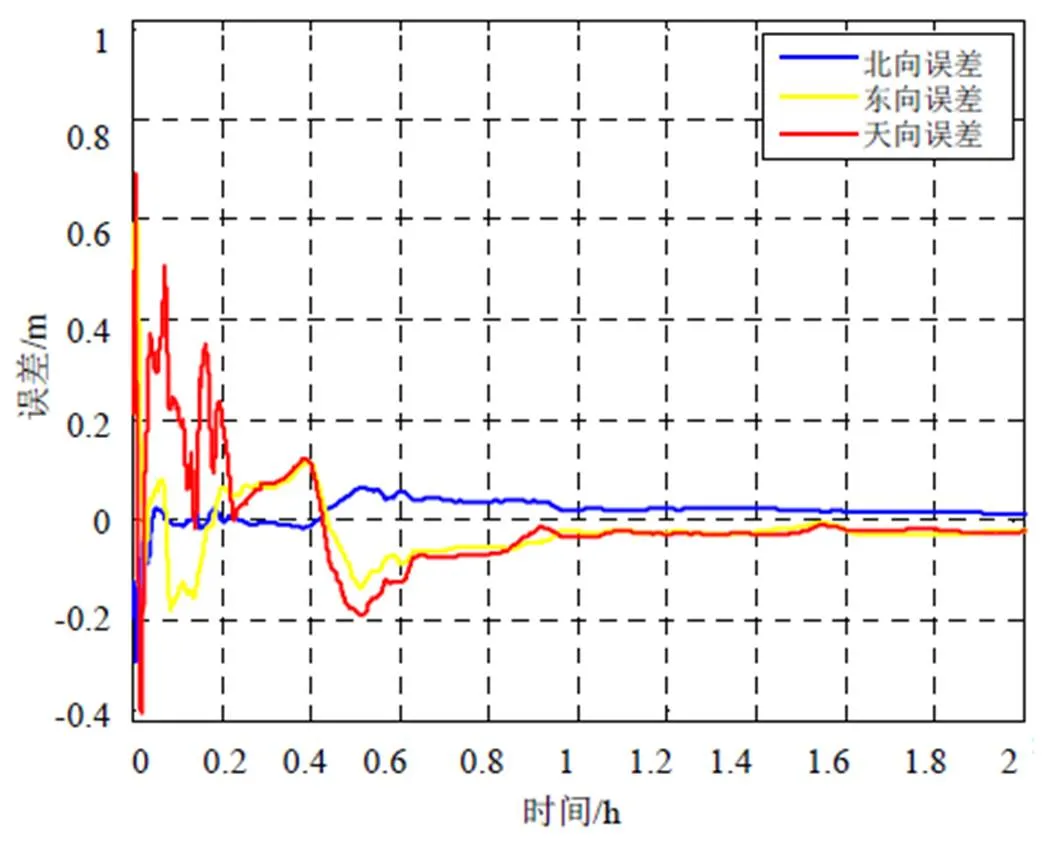
图4 定位收敛误差

表2 RTK与精密标定结果对比(单位:m)
由图4和表2结果可知,基于PPP-B2b的实时精密单点标定精度在30 min可收敛至0.1 m内。
根据《北斗系统公开服务性能规范(3.0版)中文版》,单北斗系统PPP的性能为:水平≤0.3 m(95%),高程≤0.6 m(95%),收敛时间≤30 min。实际应用过程中,实时精密定位性能与使用频点、接收机观测量精度、定位算法、初始定位精度、载体动态特性密切相关,本次研究中主要针对静态应用,观测量精度较高,且算法选择精度更优的B1I/B3I频点组合进行定位解算,最终结果优于性能规范。
4 结论
本文在研究精密单点定位算法、北斗三号 PPP-B2b信号特征分析基础上,基于PPP-B2b信号实现实时精密单点定位并应用于快速静态标定,试验结果表明30 min标定可达到0.1 m定位精度,满足高精度基准位置获取的需求,未来可进一步应用于实时高精度动态定位。
[1] Mohamed Elsobeiey1, Salim Al-Harbi. Performance of real-time Precise Point Positioning using IGS real-time service [J]. GPS Solut. 2015, 5.
[2] 中国卫星导航系统管理办公室. 北斗卫星导航系统空间信号接口控制文件精密单点定位服务信号PPP-B2b(1.0版)[S]. 2020.
[3] 何旭蕾,刘成,陈颖,等. 北斗三号卫星B2b信号解析[J]. 电子技术应用,2020,46(3):1-4+13.
[4] 夏凤雨,叶世榕,赵乐文,等. 基于SSR改正的实时精密单点定位精度分析[J].导航定位与授时,2017,4(3):52-57.
[5] 戴金倩,吴迪,戴小蕾,等. BDS-3实时精密单点定位精度分析[J]. 测绘通报,2020(1):30-34.
[6] 宋伟伟,赵新科,楼益栋,等. 北斗三号PPP-B2b服务性能评估[J]. 武汉大学学报·信息科学版,2021,DOI: 10.13203/j.whugis20200686.
[7] Reha Metin Alkan, Serdar Erol,etal. Comparative analysis of real-time kinematic and PPP techniques in dynamic environment [J]. Measurement, 2020(163)107995.
Research on Real-Time Precision Single Point Fast Calibration Technology Based on PPP-B2b
WANG Yafeng, ZHANG Quanquan
With the construction of BD-3 satellite navigation system, PPP-B2b signal provides PPP (Precise Point Positioning) service, which provides an effective basis for realizing real-time PPP. The real-time PPP method based on PPP-B2b signal is studied, and the real-time and fast calibration of reference point are realized. At the same time, the real-time calibration results are verified by the RTK relative positioning results of two points. The results show that the accuracy of calibration results can reach 0.1m within 30 minutes, which can be applied to the rapid acquisition of high-precision reference position.
Real-Time; PPP; Calibration; PPP-B2b
TN967
A
1674-7976-(2022)-02-105-05
2022-03-09。王亚锋(1990.09—),陕西渭南人,硕士,工程师,主要研究方向为卫星导航高精度定位。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
汽车实用技术(2022年11期)2022-06-20
导航定位学报(2022年2期)2022-04-11
导航定位学报(2022年1期)2022-02-17
船海工程(2021年3期)2021-06-28
导航定位与授时(2020年5期)2020-09-23
导航定位与授时(2019年3期)2019-05-16
作文与考试·小学高年级版(2017年16期)2017-08-14
卷宗(2017年1期)2017-03-17
