一种空间磁场可视化测量系统的设计
2022-06-02 03:28李雪琴唐艳妮何楚洹
大学物理实验 2022年1期
李雪琴,唐艳妮,刘 芯,何楚洹,任 静
(火箭军工程大学,陕西 西安 710025)
磁场测量技术的发展和应用有着悠久的历史,目前已经广泛应用于工业控制、智能交通、消费电子、生物医学及国防军工等领域。磁场应用范围的不断拓展,使磁场测量仪器向着高准确度、高稳定度、高分辨率、微小型化、数字化和智能化的方向发展[1]。最常用的磁场测量仪器如特斯拉计、高斯计,只能测量磁场的大小,无法确定磁场的矢量方向。在大学物理实验课程中通常采用霍尔效应测量磁场,也只能测量磁体周围一维或二维磁感应强度[2-4]。随着科技不断发展进步,一系列基于单片机技术与霍尔效应相结合的三维磁场测量系统相继被开发出来[5-8],能够较精确地测量三维空间中某一点磁场矢量,却无法测量三维空间动态磁场变化及空间磁场矢量分布情况。为了实时精确测量并形象展示三维空间磁场矢量分布,我们设计了一种由单片机控制的空间磁场可视化测量系统。该系统与高斯计等传统磁场测量仪器相比,稳定性好、测量精度高,一方面可以实时测量三维空间中任何一点的磁感应强度矢量,另一方面能够描绘出磁体周围空间的磁场强度矢量分布图,将看不见摸不着的磁场形象地呈现出来,可广泛应用于物理演示教学、磁场监测与控制等领域。
1 空间磁场矢量测量原理
三维空间中任意点的磁感应强度B可以分解成3个相互垂直的分量Bx、By、Bz,如图1所示,且满足:

图1 空间三维磁场矢量图
(1)
(2)
上式中:|B|为磁感应强度B的模值,α、β、γ分别为磁感应强度B的方向角。可以设计一个三维磁敏传感器探头,分别测量X、Y、Z方向的磁感应强度分量Bx、By、Bz,再通过矢量合成,即可求得空间点的磁感应强度B的大小与方向角α、β、γ。
2 三维霍尔磁敏传感器
测量磁场强度的磁敏元件和传感器种类繁多,根据工作原理不同可以分为磁电感应式传感器、磁通门传感器、霍尔传感器、各向异性磁阻传感器、巨磁电阻传感器、隧道磁阻传感器等。其中霍尔磁敏传感器灵敏度高、体积小、响应频率宽、功耗低并且稳定性好,既可以测量恒定磁场,又可以测量交变磁场[9],基于以上优点,本设计采用线性霍尔磁敏传感器测量空间磁场强度矢量。
2.1 三维霍尔磁敏传感器的结构
三维霍尔磁敏传感器探头结构如图2所示,6个规格参数完全相同的霍尔磁敏传感器分别粘贴在一个边长为5 mm的立方体的6个面上,立方体相对的2个面上霍尔磁敏传感器以差动的方式进行电路连接,共同完成某一个方向的磁场测量[10]。霍尔磁敏传感器采用美国Allegro公司生产的A1324集成线性霍尔传感器,它集成了霍尔元件,温度补偿电路,小信号高增益放大器和滤波器,可以有效降低霍尔元件的固有灵敏度漂移,将磁电信号的转换和放大电路集成在一起。A1324霍尔元件灵敏度K为5.0 mV/G,输出噪声低,输出电压随磁感应强度线性变化,其输出电压U与磁感应强度B关系为U=KB。其中B为垂直于传感器正面的磁感应强度。由于芯片的感应电压只与垂直于它正面方向上的磁场强度大小有关,故利用立方体相对两个面上的一组传感器可以测量某一方向上的磁场强度,利用3组互相垂直芯片可以测量3个垂直方向上的磁场强度。
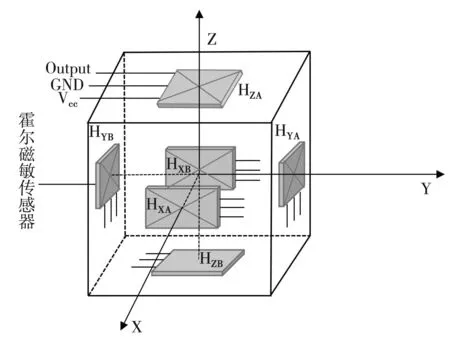
图2 三维霍尔磁敏传感器探头
三维霍尔磁敏传感器探头X轴方向的电路连接示意图如图3所示(Y、Z方向的电路连接示意图与图3完全相同)。HXA和HXB为粘贴在小立方体两个互相平行表面上的两个霍尔元件,采用差分的方式进行连接。因为霍尔元件的不等位输出电压是由于霍尔电极的装配误差等因素所造成的,与被测磁感应强度无关[3],而配对的两个霍尔元件由于粘贴方向相反,被测磁感应强度在两个霍尔元件上所产生的霍尔输出电压的极性也相反,所以在这种连接方式下,HXA和HXB输出的不等位电压相当于共模信号,而被测磁感应强度所产生的霍尔输出电压相当于差模信号。两个霍尔元件的输出信号接到差分放大器后,其不等位输出电压得到了抑制,而霍尔输出电压得到了有效的放大。这种以差动方式连接的三维霍尔磁敏传感器探头,不仅可以有效地减小霍尔磁敏元件不等位输出电压和温度变化的影响,还可以获得双倍的霍尔输出电压,使得测量结果的准确性、稳定性和可靠性进一步提高。

图3 三维磁敏传感器X方向的电路连接示意图
2.2 三维霍尔磁敏传感器的调零与定标
若要实现对被测磁场的准确测量,需要在使用之前对三维霍尔磁敏传感器探头进行调零和校准,以消除电磁环境干扰等因素,三个方向的三组霍尔磁敏传感器应分别进行调零和磁场校准。
在图3所示电路中,R1,R2为量程10 KΩ的可调电阻器,R3=R4=Rf=100 KΩ,通过调节变阻器R2的阻值,可以在被测磁感应强度为0时使传感器的输出电压Uout为0,即两个霍尔元件的不等位输出电压经过差分放大后抵消,实现传感器调零。
由于本系统的探头采用了线性元件,且系统的量程在探头的线性传输范围之内,所选用的放大器和数据采集器件也都具有很好的线性度,所以整个系统具有良好的线性特征。选用长直螺线管中心轴线处的已知磁场强度的大小B=μ0nI进行系统定标,其中μ0为真空磁导率,n为单位长度线圈匝数,I为螺线管励磁电流。改变长直螺线管励磁电流I,记录X轴一组霍尔传感器处在不同磁感应强度B时对应的输出电压Uout,由于这两个物理量满足线性关系Uout=KHB,由此可以确定X轴霍尔传感器灵敏度KH。通过调节图3所示电路中变阻器R1的阻值,使得输出端电压Uout=KHB0,其中B0为量程中间某点已知磁感应强度,由此确定变阻器R1的阻值,即可完成定标。同理可以确定Y轴、Z轴霍尔传感器灵敏度及定标。当传感器选用的电子元件规格参数完全相同时,在理想情况下三维空间X、Y、Z方向的传感器灵敏度均为KH,三组互相垂直的传感器输出电压值为:
Ux=KHBx
把整张椅子锯成两半——左、右两边锯或者椅背、椅面锯,就会收获一套完美的置物架组合,每一半钉在墙面不同的位置,不仅设计感十足,还能收纳书本等小物件。
Uy=KHBy
Uz=KHBz
因此,空间任意点的磁感应强度为:
3 系统总体设计
系统的总体设计如图4所示,主要包括磁场数据采集存储模块、数据传输模块及测量结果显示模块三部分。该系统以STM32F4单片机作为总控芯片,具有程序执行和数据传输并行处理能力,控制三维磁场强度数据的采集、存储及传输功能。数据采集存储模块分为数据采集及存储两部分,三维磁场强度数据采集功能由一个固定在三维移动平台上的三维霍尔磁敏传感器探头实现,首先STM32F4单片机控制三维移动平台带动固定在其上的三维霍尔磁敏传感器探头在预设空间移动,实时记录磁敏传感器的位置坐标(x,y,z)及对应的磁感应强度分量(Bx,By,Bz),完成空间磁场强度数据的采集;再由STM32F4单片机控制A/D转换模块将磁敏传感器的位置坐标(x,y,z)及磁场分量(Bx,By,Bz)转换为数字分量并存储在单片机中,完成磁场强度数据的数字化处理与存储。数据传输模块由USB串口将STM32F4单片机中存储的磁敏传感器的位置坐标(x,y,z)及对应的磁场分量(Bx,By,Bz)数据传输给上位机,再由上位机显示测量结果。测量结果显示模块分为数字显示功能和图像显示功能两部分,数字显示功能通过单片机算法处理直接输出磁敏传感器的实时空间位置(x,y,z)及三维磁场强度矢量(Bx,By,Bz),可以实时动态测量变化的磁场并显示测量结果;图像显示功能由上位机中具有数据仿真功能的软件对导入其中的磁场强度数据进行数值模拟,绘制磁体周围空间的三维磁场强度矢量分布图,完成磁场强度矢量的测量、模拟和可视化展示。该磁场测量系统精度高、稳定性好、量程范围广,尤其三维磁场分布可视化测量及展示功能可广泛应用于复杂磁场测量及物理演示教学等方面,具有潜在的应用价值。

图4 空间磁场可视化测量系统总体结构
基于单片机的空间磁场可视化测量系统实物图如图5所示,与高斯计等现有磁场测量仪器相比,该空间磁场可视化测量仪有以下四大创新优势:
(1)采用空间三轴磁敏传感器采集磁场强度,摆脱了传统测量单一方向磁场测量的弊端和缺陷,有效提高了测量精度和可靠性;
(3)空间磁场可视化功能,将空间中看不见摸不着的磁场通过数据仿真的模拟图像真实直观地展现出来,可以测量空间磁场矢量,并绘制四维(x,y,z,B)磁场矢量分布图;
(4)采用单片机控制的三维自动扫描式磁敏传感器测量系统,自动化、智能化水平高,操作简单,便于空间磁场测量和物理教学演示。

图5 空间磁场可视化测量系统实物图
4 空间磁场测量
4.1 地磁场测量
该空间磁场可视化测量系统测量精度高,量程范围广,可以用来测量地磁场等弱磁场。地磁场在地磁导航、地磁探矿、磁震预警等方面有着广泛的应用,精确测量地磁场具有非常重要的意义。地磁场是一种弱磁场,地球表面平均磁感应强度约为10-5T,为了消除仪器设备等其他铁磁性物质对测量结果的影响,选择在空旷的操场采集地磁场数据。用三维霍尔磁敏传感器在空间预设区域进行扫描测量,采集地磁场数据,分别采集X、Y轴向的磁感应强度Bx,By,并进行矢量合成,得出地磁场在水平面内的地磁场分量Bxy,其平均值为32.5 μT,实验数据如表1所示。现处西安地磁场水平面的磁感应强度官方公认参考值为32.3 μT,实验数据表明,该磁场测量设备的平均相对误差仅为0.62%,具有较高的测量精度。

表1 西安地磁场水平分量测量数据
4.2 强磁场测量
该空间磁场可视化测量系统测量精度高,量程范围广,不仅可以用来测量地磁场等弱磁场,还可以测量铁磁体等强磁场。将U型磁铁竖直放置在三维霍尔磁敏传感器探头正下方,如图6所示。单片机控制三轴电机驱动三维磁敏传感器探头在U型磁铁周围预设空间逐点扫描测量,单片机数据采集传输系统逐点采集磁敏传感器的实时空间位置(x,y,z)及对应的三维磁场强度矢量(Bx,By,Bz),并将数据通过USB串口传输至计算机。一方面通过单片机算法处理直接实时动态显示磁敏传感器的空间位置(x,y,z)及对应的磁场强度矢量(Bx,By,Bz),另一方面对导入数据进行数值模拟,绘制出U型磁铁周围三维空间磁感应强度矢量分布图。

图6 U型磁铁磁场强度测量图
利用三维霍尔磁敏传感器探头采集U型磁铁磁极正上方5.0 cm空间的磁感应强度数据(Bx,By,Bz),再通过矢量合成获得该空间区域的磁感应强度B的矢量分布图,如图7所示,定义U型磁铁N极方向磁感应强度为正,S极方向磁感应强度为负,矢量箭头代表磁感应强度的方向,矢量的模长代表磁感应强度的大小。从图中可以看出磁感线从U型磁铁N极出发,指向S极。图中(X,Y,Z)为该点的空间位置坐标,(U,V,W)为对应的三维磁场强度分量(Bx,By,Bz)的大小。
利用三维霍尔磁敏传感器探头分采集U型磁铁磁极正上方10.0 cm、11.0 cm、12.0 cm三层空间的磁感应强度数据(Bx,By,Bz),再通过矢量合成获得该空间区域的磁感应强度B的矢量分布图,如图8所示,从图中可以看出磁感线从U型磁铁N极出发,指向S极,且越靠近磁极,磁场矢量的模长越大,即磁场越强,这与理论完全相符,从三维磁场矢量分布图中能够形象直观地看到U型磁铁周围空间的磁感应强度的大小、方向以及矢量分布图。

图7 U型磁铁磁极上方5.0 cm三维磁场矢量分布图
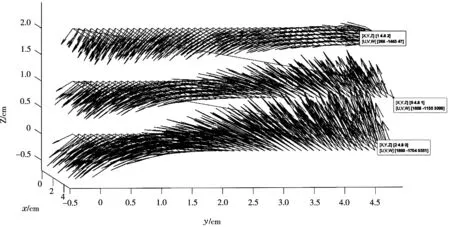
图8 U型磁铁磁极上方10.0 cm以上空间三维磁场矢量分布图
5 总 结
为了提高磁场测量精度,并实现磁场的可视化测量,我们设计了一种空间磁场可视化测量系统。该系统利用三维霍尔磁敏传感器测量空间各点的磁感应强度矢量,通过单片机采集、传输数据至上位机,在上位机中实时显示测量结果,并进行数据仿真,模拟空间磁感应强度矢量分布,实现空间磁场的可视化测量。实验结果表明,该磁场测量系统的精度为1 μT,量程范围为±8 500 μT,通过地磁场水平分量测量数据与官方公认的西安地磁场水平分量比较,得出仪器测量误差为0.62%,精确度较传统磁场测量仪器有很大的提高。该空间磁场可视化测量系统一方面可用于大学物理实验教学和演示,可视化磁场展示功能,可以让学生直观地看到生活中无处不在的磁场,激发学生学习热情,有效提高教学效果;另一方面可以精确测量复杂多变的磁场,例如地磁探矿、考古探测、阵地磁场检测、电磁污染监测、医学诊断等领域,具有广阔的应用前景。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
传感器世界(2022年6期)2022-11-25
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
商品与质量(2019年47期)2019-06-18
农业科技与装备(2017年4期)2017-08-17
科技资讯(2017年3期)2017-03-25
山东工业技术(2016年15期)2016-12-01
太空探索(2015年6期)2015-07-12
物理教学探讨(2014年7期)2015-01-12