
基于轨道模式的自动化节水灌溉装置模型设计
2022-05-31 05:24邬政奇潘学渊李明东唐中得
农业技术与装备 2022年3期
邬政奇,潘学渊,李明东,唐中得,殷 飞
(1.吉林农业科技学院,吉林 吉林 132101;2大连市水利规划设计院,辽宁 大连 116000)
我国水资源匮乏,人均占有量不足2 200 m3,随着现代工业的发展进步,更加快了水资源的利用,同时工业生产更是造成大量水污染。我国现在农业灌溉处于大水漫灌与节水灌溉并存的阶段,传统灌溉模式没有根据作物需水的程度来灌溉,很可能会引发作物受水过多而导致水涝,严重浪费水资源。21 世纪以来,国内农业灌溉进入到一个新的阶段,实现了粮食的大丰收,农业灌溉已经成为国民经济一个新的增长点。
1 基于TRIZ理论的问题分析
TRIZ 理论是原苏联阿奇舒勒对发明问题解决理论的研究工作的总结,他发现了发明背后的模式并形成了TRIZ 理论的原始基础。主要理论是:创新思维方法与问题分析方法,技术矛盾解决原理;创新问题标准解法等理论。本装置基于以上理论的分析与应用,设计了居于轨道模式的自动化节水灌溉装置模型。
1.1 最终理想解
最终理想解的设计分析见表1。
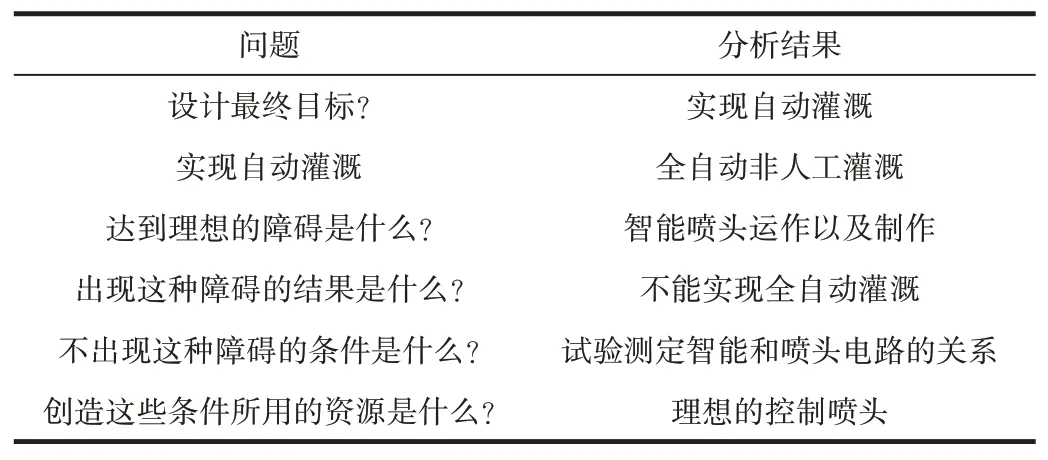
表1 最终理想解的设计分析Tab.1 The design analysis of final ideal solution
1.2 技术矛盾
即希望实现全自动灌溉模式又希望测定数据精确,构成了物体形状和智能技术约束。
1.3 物理矛盾
文章设计的自动节水化灌溉装置既要安装简单,又要精准灌溉。故决定采用物理矛盾的空间分离,将带动装置、灌溉装置、排水部分,分离解决以上问题。
1.4 功能分析
基于以上理想解和矛盾的问题分析,对自动化节水灌溉进行了功能分析,见表2。
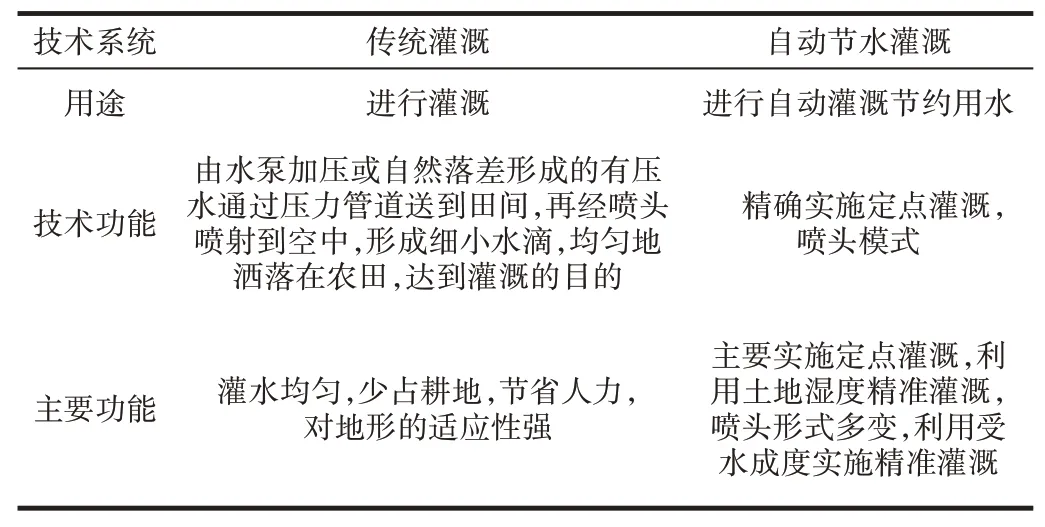
表2 功能分析表Tab.2 The function analysis
2 系统的研究与结构分析
根据功能分析,对系统的结构进行分析与设计。
2.1 系统的研究
研究灌溉轨道模式。
研究灌溉喷头出水量以及出水模式。
研究如何将湿度传给喷头的接受装置,实现不同的喷水模式。具体的技术路线见图1。

图1 技术路线图Fig.1 The technical roadmap
2.2 系统基本结构
2.2.1 结构介绍
为了改变传统的灌溉方式,该装置用全新轨道的方式进行定点灌溉,能够更好地节约水资源,利用定点的湿度来反馈并进行精准、定量的节水灌溉,具体的模型概念图见图2。
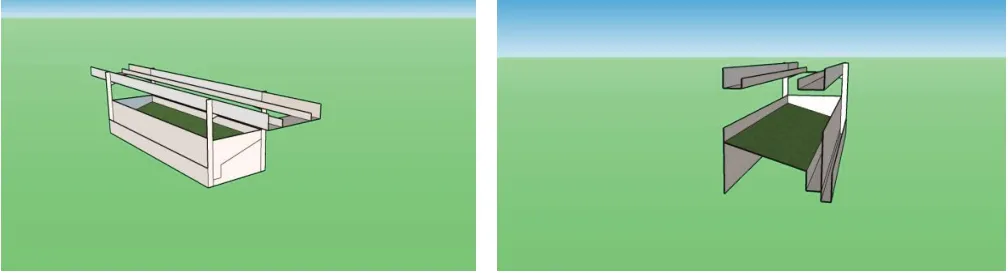
图2 整体模型概念图Fig.2 The conceptual diagram of the overall model
该装置主要包括:动力装置部分;智能自动化喷头部分;土壤湿度传感器部分;排水循环系统部分,以下仅列出动力装置和喷头,见图3、图4。

图3 系统动力装置Fig.3 The system power unit

图4 自动化喷头实体图Fig.4 The entity diagram of automatic sprinkler
2.2.2 系统全自动原理
基于湿度检测参数的自动节水化灌溉装置,在作物下方埋入土壤湿度参数检测仪,由湿度检测装置实时传送作物土地的湿度,传输到用户移动终端,用户登录用户名和密码可以实时观测作物的基本情况。移动网络终端进行控制,轨道带动小车进行模式灌溉,设定定点时间,自动智能地灌溉,见图5。

图5 移动网络端用户界面Fig.5 The user interface of mobile network terminal
2.2.3 结构特点
新型轨道模式。轨道是基于整体设计的骨架,承载着整个装置体系的自重应力,轨道上方有固定刹车片,便于装置小车刹车定点灌溉。
湿度传感器。在作物下方埋入湿度传感器,以便随时传输作物湿度的参数,反馈到网络终端,通过网络终端实时传输到用户移动客户端。
灌溉方式。通过湿度传感器可以进行远端定点灌溉,移动到湿度比较小的地方去,定点准确地给作物受水。一共有3 种模式:定点滴灌模式,雾型全方位灌溉模式,直流型远端灌溉模式。
装置小车。装置小车在轨道上滑行,带动灌溉喷头移动,完成灌溉任务。
3 装置的整体系统创新设计
3.1 装置创新设计特点
灌溉装置轨道有特殊刹车装置,能够处理特殊情况的制动刹车,保证整个装置的正常运作,防止小车冲出轨道;有效缩短了灌水时间,该系统避免了传统地面灌溉方式中畦田平整度阻碍水流向前推进现象的发生,水流在灌溉装置中被带动,流速比传统灌溉速度快,且在灌溉中无水流损失;通过app自动设置,进行灌溉移动。
3.2 装置系统水回流设计
自动节水灌溉装置整体模型包括种植槽体、设置于种植槽体上的架体、沿架体长度方向往复平移运动的麦克纳姆轮车、以及水箱。其中种植槽体包括倾斜种植面和位于倾斜种植面低位处的集水槽,种植槽体上位于集水槽外侧位置设置有回流槽,集水槽的底部侧壁设置有与回流槽连通的回流口,水箱内安装有第一抽液泵,第一抽液泵通过管道与喷淋装置连接,回流槽通过管道与水箱连接。

图6 侧方内部水渠 Fig.6 The side internal canal
图7 侧方外部水渠Fig.7 The lateral external canal
3.3 物理参数模式的设定
在利用自动控制启动装置时,在程序中设定了开启,关闭系统的条件等,当某个量达到条件就执行动作,比如湿度过低,产生报警,自动控制系统就会对整体装置进行程序执行灌溉,另外,自动灌溉装置可以进行超远距离传输,利用网络等就可以实时接受数据,实时掌握作物的生产等,以便做出及时的判断和调整,在自动节水化灌溉装置中采用了物理参数控制模式,就是灌溉的方式不同,设置的灌溉方式模式也不同,灌溉和滴灌采用的2 种不同的模式,利用管道压力,出水控制,水泵抽水强度,控制物理参数,一般有多种模式,大型喷灌模式,进行全部出水灌溉;定点喷灌模式,进行定点区域的灌溉;滴灌模式,利用喷头的第二模式将水滴均匀的散落在需要喷洒的土壤,一般分为滴灌,渗灌,微灌模式。多种模式的物理参数控制,更好地实现了自动节水的灌溉模式,利用灌溉装置进行节能,节水的灌溉,实现了水资源的节约,人工物力的节约,大大降低了人力的工作强度,实现了远程控水的物理参数模式,见图8。

图8 终端控水装置Fig.8 The terminal water control device
4 装置的方案评价与前景分析
4.1 方案可行性分析
方案1:自动节水化灌溉装置。将传统灌溉固定装置改成可移动的带动装置,在带动装置下增填轨道;在带动装置下增加喷头装置,进行定点灌溉。
方案2:手动型灌溉方式。利用半自动的手动方式进行定点灌溉。方案1评价:节约成本,节约用水,便于操控,可以进行远端app模块进行远端控水,大大节省了人力。
方案2评价:费时费力,消耗大量的金钱,浪费水资源
4.2 存在的主要问题
地域的局限性,只适用于大棚结构,具有一定的局限性。安装局限性,较传统的灌溉安装较为困难,滴灌地区小于传统灌溉区域。
4.3 应用前景
据不完全统计,截至目前国内从事节水灌溉产品制造和工程建设的企业约有500 家,导致节水灌溉产品的供需市场在短时间内发生了较大的变化,但大多数企业规模较小,使得市场竞争日趋激烈。同时,大多数企业的生产和经营状况却是:规模较小,资金较少,技术水平较低或缺乏各种专业技术人员合理搭配的较为完整的技术体系;研发和创新能力较弱,新产品难以出现;技术含量较高、制造工艺要求相对较高的产品和国外同类产品比较仍然有较大的差距;由于生产设备和管理上的原因,造成有些企业的产品质量不稳定。
近年来,我国相继颁布了《全国农业可持续发展规划(2015-2020)》《水污染防治行动计划》等有利于节水灌溉行业的产业政策,从水利、农业、农业综合开发、土地整理以及城市园林等行业和领域入手加大对节水灌溉工程的投入,节水灌溉行业面临新的发展机遇,行业发展潜力巨大、前景看好。此工程原理清晰明了,工程结构简单,便于施工制作,以及安置,使灌溉水头能更好地为农作物提升湿度。节约用水,省时省力省钱省心。
猜你喜欢
农业与技术(2022年3期)2022-02-25
科学中国人(2021年29期)2022-01-24
科学中国人(2021年31期)2022-01-22
科学中国人(2021年17期)2021-08-18
科学中国人(2021年14期)2021-07-16
教育周报·教育论坛(2021年21期)2021-04-14
保健与生活(2021年1期)2021-02-04
数学学习与研究(2018年1期)2018-02-03
科技创新导报(2016年5期)2016-05-14
时代英语·高二(2015年2期)2015-05-18
