基于机器视觉的电线电缆检测技术研究
2022-05-31 14:38刘畅
科技创新导报 2022年2期

摘要:本文列举了0.6/1kV挤包绝缘电力电缆的检验项目和检验方法,讨论了需要人眼参与识别的静态与动态的检验项目。针对绝缘和护套材料的断裂伸长率、热延伸和低温拉伸检验项目与机器视觉检测技术相结合进行了探究,提出将机器视觉检测技术应用到电线电缆检验中。对于运动过程中和非接触状态下的试样状态变化的捕捉,机器视觉检测技术具有优势。
关键字:机器视觉 电线电缆 检验项目 检测方法
电线电缆作为电力传输的主要载体,承担着整个国家经济发展和人民日常生活的安全重任,劣质电缆给人们的人身安全和财产安全造成了极大的安全隐患,因此对电线电缆产品的检验尤为重要[1]。电线电缆的检验除了标志项目以外都是基于仪器设备完成的,但其中一些检验项目的结果还需要通过人眼进行过程中位置抓取或者识别,为了提高识别的准确率及效率,本文对机器视觉技术在电线电缆检验中的应用进行了探究。
1 电线电缆检验项目及检验方法
以0.6/1kV电力电缆为例,检验项目按类别可分为结构尺寸、电气性能、绝缘机械物理性能、护套机械物理性能、热塑性能、电缆燃烧性能及非电气的其他各类试验。对于各个检验项目和具体的检验方法在《额定电压1kV(Um=1.2kV)到35kV(Um=40.5kV)挤包绝缘电力电缆及附件》(GB/T 12706.1-2020)第1部分:额定电压1kV(Um=1.2kV)和3kV(Um=3.6kV)电缆中有详细的规定,不同的试验项目适用于不同的材料,本文仅按照适用的情况进行介绍,并列举出其中部分可与机器视觉检测相结合的检验项目进行探讨[2]。
1.1 结构尺寸
包含的项目包括绝缘厚度、金属屏蔽层、金属铠装厚度和宽度、护套厚度等。这些尺寸的测量都是在静态下利用投影仪、游标卡尺或者千分尺进行的,计算后得到最终结果。
1.2 电气性能
包含的项目包括导体电阻、绝缘电阻、电压试验。对于电气性能项目中的导体电阻、绝缘电阻、的检验结果均为专用仪器直接读数,电压试验检验结果为击穿报警提示。
1.3 绝缘机械物理性能和护套机械物理性能
包括老化前后的绝缘和护套的抗张强度和断裂伸长率[3]。抗张强度可以通过拉力机测量的力和试样的截面積计算得到,目前对于断裂伸长率项目的检测有两种手段。第一种方法是在绝缘上画上间距的标记线,在拉力机上进行拉力试验时需要人工使用直尺测量绝缘断裂瞬间两个标记线间距离,通过计算得出该段试样的断裂伸长率。第二种方法是通过和拉力机配套使用的大变形测量装置进行检测,通过将两个间距固定的夹具夹到绝缘上,在断裂的瞬间自动读取数据得出断裂伸长率[4]。
1.4 热塑性能
包括高温压力试验和低温性能,根据绝缘材料和护套材料的不同,对绝缘中PVC/A进行高温压力试验,对护套中PVC、PE中的ST7及ST8进行高温压力试验,对绝缘中PVC/A及护套中PVC和ST8进行低温性能试验。高温压力试验项目在试样制备、加热、冷却和截取试片等环节的处理后利用读数显微镜或测量投影仪测量凹痕尺寸。低温性能包括绝缘和护套的低温卷绕试验、低温拉伸试验和低温冲击试验。其中,低温卷绕和低温冲击试验都是利用机械装置在低温环境下进行的,结果通过人眼观察是否有裂纹。低温拉伸试验适用于不进行低温卷绕试样的绝缘和护套,该试验项目利用带测量夹头位移的自动设备在低温环境下进行,可以通过标记线间距离的增值与原始距离之比计算伸长率,也可以测量夹头间距离的方法计算出伸长率。
1.5 电缆燃烧性能
包括单根阻燃试验、成束阻燃试验、烟密度试验、酸气含量试验、pH值和电导率、氟含量试验。其中,单根阻燃试验和成束阻燃试验需要在供火结束后擦净试样,确认炭化部分起始点后测量火焰蔓延的距离。其他试验项目均用专用仪器进行测量。
1.6 非电气的其他各类试验
包括了失重试验、热冲击试验、耐臭氧试验、热延伸试验、吸水试验、收缩试验、碳黑含量、硬度试验和弹性模量试验。这些试验项目中热延伸试验和收缩试验需要通过测量加热前后的标记间距差值计算出变化百分比,耐臭氧试验需要在臭氧暴露后观察试样表面有无裂纹,热冲击试验需要将试样绕在试棒上经加热后观察是否有裂纹。
上述需要人眼参与的检验项目中,结构尺寸、高温压力试验、低温卷绕试验、低温冲击试验、热冲击试验是静态的尺寸测量,而单根阻燃试验需要人工确认碳化情况后测量长度;低温卷绕试验、低温冲击试验、耐臭氧试验是静态的样品表面状态确认;老化前后的断裂伸长率、热延伸试验、低温拉伸试验是动态过程中的长度测量。机器视觉对于动态中目标的抓取准确性和效率更高,更具有研究意义。
2 机器视觉技术的应用
机器视觉检测就是利用机器代替人去完成识别、测量、指引、定位和判断等功能。其应用范围随着工业自动化的发展逐渐完善和推广。机器视觉可以完成人工很难实现的任务,特别是需要高速、高精度要求的系统。
机器视觉是适合现代制造技术发展的一种检测方式,机器视觉检测与传统人工检测有以下优点。(1)客观性:机器视觉检测可以得到更加准确可靠检测结果,不会受到操作者的状态、责任心、经验等因素的影响。(2)高速度:机器视觉检测能更快地检测产品,特别是当检测高速运动的物体时,能够准备定位瞬间状态。(3)非接触:机器视觉可以在非接触的状态下完成测量工作,在受力易导致检验结果变化的情况下,具有绝对的优势。
2.1 机器视觉系统的组成和基本工作原理
典型的嵌入式机器视觉系统包括光源、图像传感器、视频解码器、图像处理单元、显示器、存储器、输出单元/通信。
首先,通过CMOS或CCD摄像机将采集目标的光学信息转换成为图像信号,经由微处理器中嵌入算法进行图像处理,通过对采集到的多幅图像的识别与分析,最后计算得到结果输出。
光源作为影响机器视觉检测系统图像质量的重要因素,将直接影响输入数据的质量进而影响数据分析的准确性。使用红外光源和可见光源采集图像的方式和本質有所不同,采用红外光源可以在全天的任意时段采集图像,而采用可见光源则不能。另外,使用可见光源采集到的目标图像可能受到阴影的影响,而使用红外光源采集到的目标图像则受阴影的影响较小。红外成像技术是利用景物对红外光的辐射差成像,将红外辐射转换为可见光图像,利用场景内物体本身各部分辐射的差异获取物体图像的细节,所以红外图像的获取可不依赖于外部光线[5]。
图像传感器是一种把光信号转换成电信号的装置,按照类型来分图像传感器主要可以分为CCD和CMOS[6]。在选择时应对照他们的灵敏度、响应均匀性、速度、窗口、可靠性、暗电流等特点比较进行选择。
嵌入式系统开发的主流CPU有DSP和单片机两大类。DSP的应用领域主要集中在较复杂的算法处理中 [7],因此选择DSP作为处理器更适用于图像处理。
2.2 系统的软件流程
系统软件的核心是图像处理与识别模块,模块应具有高精度、高速度和实时性的特点。软件算法的选取直接关系到整个系统的运行速度及识别效率问题。
对于运动中的物体,每一帧采集到的图像位置信息都是未知的,因此不能仅根据直方图选择阈值来确定物体的位置。差影法和帧差法常用于动态目标的捕捉。
帧差法即图像序列差分法。利用连续两帧图像的亮度差来分析图像序列的运动特性,确定图像序列中有无运动物体并得到物体的大致位置和形状等信息。但当运动目标上的像素灰度、纹理等信息较接近时,该方法通常只能得到部分运动信息。
差影法也就是背景减法,适用于摄像机静止的情况。通过将背景帧与当前帧的灰度差与设定阈值比较来判定是否有运动发生。并将前景从背景中分离出来得到运动目标的位置和形状等较完整的信息。但是这种方法适用于背景和前景灰度有明显对比度的情况,否则会出现漏检。
差影法的定义如下:设连续两帧图像分别为f(x,y,ti)和f(x,y,tj),通过对比两帧图像前后的变化情况来寻找目标图像[8]。
(1)
式(1)中,当 时,认为目标图像出现。因此预先拍摄一幅背景图像,其数据保存在DSP内部RAM中,然后按摄像机的帧率连续采集图像,判断各点灰度值相减的结果。如果全都是接近0,那么说明这幅图像与上一幅图像没有明显变化,保存该图像数据。如果有一个较大的区域与0相差很远的话说明这幅图像较上幅图像发生了较大变化,保留该图像数据。选取所有图像中最后一幅变化较小的图像作为断裂时的图像,此时为断裂瞬间图像。由于检验环境为实验室,可以选取简单的背景简单,可选用差影法。为提高检测精度,在试样检测处可加入色差大的挡板,加强试样与背景对比度,效果更佳。确认好试验开始和断裂瞬间的图像后,将图像进行中值滤波、直方图均衡化、断裂位置提取,与初始间距比对计算得出伸长率。
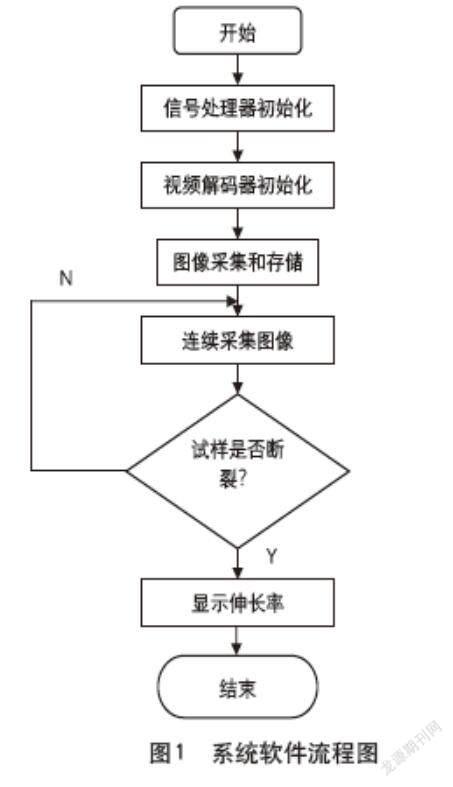
2.3 系统工作流程
系统工作流程包括硬件系统的初始化,系统软件流程图1所示。
3 结语
目前,机器视觉检测技术已经渗入到人们的日常生活的各个领域以及工业生产中,本文对嵌入式系统在电线电缆检验中的应用进行了描述,该系统适用于老化前后的断裂伸长率、热延伸试验、低温拉伸试验。PC机系统的处理速度及触发方式等更容易实现,但对于仅有机械结构而不需要联机使用的检验设备,使用嵌入式的机器视觉系统成本更低,移动更便捷。
参考文献
[1] 王坤辉.电线电缆检测项目及方法探究[J].电力系统装备,2020(16):9-11.
[2] 杨煜昕.基于机器视觉的混凝土表观质量检测方法研究[D].镇江:江苏大学,2020.
[3] 张玮琪.矿用MYP型号电缆的绝缘老化分析及寿命预测[D].西安:西安科技大学,2018.
[4] 刘畅.基于DSP的电线电缆绝缘断裂伸长率检测图像采集装置设计[J].中国科技纵横,2021(9):68-69.
[5] 付娜.红外图像的采集、增强与分割处理研究[D].大连:大连理工大学.2005.
[6] 侯杰,于盈盈.图像传感器技术的专利发展现状分析[J].数码设计,2020,9(4):252-253.
[7] 吴志军.基于XC7K325T+TMS320C6678的高速图像处理系统设计与实现[J].无线互联科技,2021,18(5):51-52.
[8] 李晴,徐群.复杂场景下多运动目标速度检测技术的实现[J].计算机与数字工程,2006(11):167-171.
作者简介:刘畅(1983—),男,硕士,工程师,研究方向为检验检测。
猜你喜欢
山东冶金(2023年6期)2024-01-10
建筑与预算(2023年11期)2023-12-25
建筑与预算(2022年2期)2022-03-08
电线电缆(2018年6期)2019-01-08
幸福(2018年33期)2018-12-05
铁道通信信号(2018年6期)2018-08-29
理化检验(物理分册)(2017年5期)2017-06-01
现代传输(2016年4期)2016-12-01
钢管(2016年4期)2016-11-10
中国资源综合利用(2016年6期)2016-01-22