
基于Lugre模型和自抗扰技术的稳定控制系统设计
2022-05-27 07:51:30崔晨耕
自动化与仪表 2022年5期
崔晨耕
(西安航空职业技术学院 电子工程学院,西安710000)
陀螺稳定平台利用陀螺感应惯性空间转速和平台稳定控制,隔离外界扰动干扰,实现平台在惯性空间内保持视轴稳定,为相机、红外探测器、激光器、测距仪等光学仪器提供稳定环境,为实现清晰成像、测量提供一个惯性稳定环境,已广泛应用于机器人、无人机、车载、船载、移动监控、地理测绘等众多领域。其中最为关键的技术之一是稳定控制器的设计,随着载荷对应用环境稳定性的要求更为苛刻,对控制器的控制精度要求也越高。目前采用的控制方法主要包括PID 控制、自适应控制、鲁棒控制、滑膜控制、神经网络、模糊控制、自抗扰控制等。
自抗扰控制理论主要由跟踪微分器、扩张状态微分器、非线性组合控制律等构成[1]。自抗扰控制器突破了线性系统和非线性系统的界限,同时打破了确定性和不确定性的界限,通过扩张状态观测器实现对不确定扰动的估计,从而实现对扰动补偿,相比于基于误差进行PID 补偿的控制策略,其补偿效率更高,突破了“基于误差进行补偿”的局限。目前,自抗扰控制策略已在航空、航天、电力、交通、化工等多个领域得到应用,受到多学科的广泛关注,同时出现了多种改进型自抗扰控制算法。文献[2]等人针对控制系统的时滞问题,提出利用自抗扰控制算法解决时滞问题,并给出了自抗扰参数整定方法。文献[3]将自抗扰控制算法应用于永磁直线同步电机的控制中,提高电机转速控制的稳定性。文献[4]对自抗扰控制进行改进,引入滤波算法,提高陀螺稳定平台的控制经度。文献[5]将自抗扰控制应用于快速反射镜控制,提高快速反射镜的角度跟踪精度。
典型线性PID 控制器无法很好地克服摩擦、力矩不平衡等带来的非线性力矩干扰,为了克服摩擦干扰,进一步提升系统稳定精度,本文运用线性自抗扰控制器(active disturbance rejection control,ADRC),同时采用Lugre 摩擦补偿模型,提出一种基于自抗扰技术的复合控制器。扰动测试结果表明,与传统PI 控制器相比,该复合控制器具有更高的控制精度和抗扰能力。
1 控制对象模型
系统采用直流力矩电机作为动力执行机构,将电机与平台载荷作为一个整体对象,其等效模型如图1所示。控制对象主要涉及3 个平衡方程[6]:
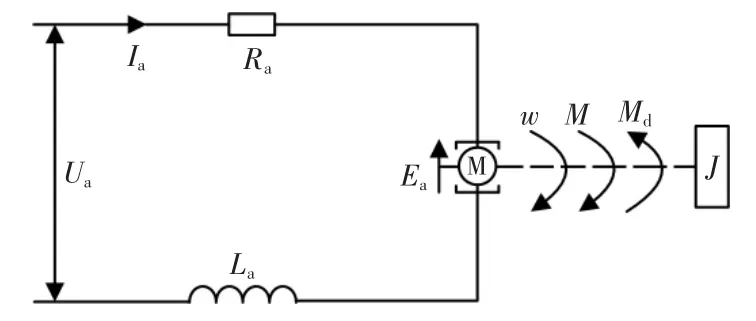
图1 电机和平台载荷等效模型Fig.1 Load equivalent model of motor and platform

式中:L表示力矩电机的电感值;R表示力矩电机的电阻值;I表示力矩电机中产生的电流;U表示电机输入电压值;J表示载荷的惯量;E表示反电动势;ω表示转速;M表示输出的扭转力矩;Ce表示反电动势系数;Cm表示力矩系数;df表示摩擦力矩。
对电机平衡方程进行拉氏变换,并进行方程联立获得电机模型输入输出间的传递函数为

为提高伺服稳定系统的响应速度,一般会在速度控制环内部设计电流环,电流环的响应速度会远高于速度环,可将电流简化为一个比例环境,因此速度环的开环动力学方程可表示为

式中:dL表示其它未知扰动;令f=df+dL,表示系统受到的内部摩擦、外部扰动等全部扰动总和;令,则速度环的开环传递函数可简化为

速度环控制对象可简化为如图2所示,系统包含了一个积分环节,输入端包括电机驱动输入、内部摩擦和外界未知扰动。
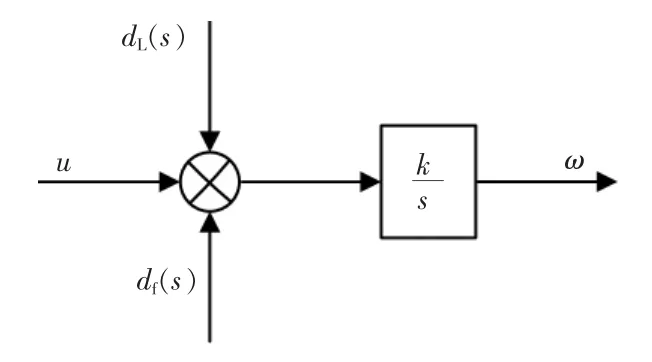
图2 速度环控制对象简化结构Fig.2 Simplified structure of speed loop control object
稳定平台主要分为两框架稳定结构和三框架稳定结构两类,两框架结构一般包括方位轴和俯仰轴两轴,三框架结构一般包括方位轴、俯仰轴、横滚轴三轴[7-9]。由于每个轴向的控制结构基本相同,仅以其中方位轴为对象进行建模,方位轴的速度闭环控制回路结构框架如图3所示。
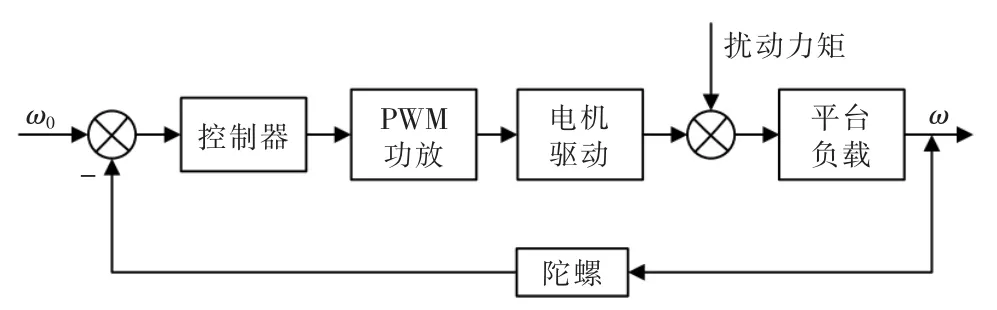
图3 控制回路结构架Fig.3 Control loop structure frame
2 线性自抗扰控制器设计
在主控制回路的基础上引入线性自抗扰控制器,线性自抗扰控制系统的结构如图4所示。图中,ω0表示系统输入的转速命令值;C(s)表示速度控制器,采用经典PI 控制器;G(s)表示被控对象的传递函数。

图4 线性自抗扰控制器原理图Fig.4 Schematic diagram of linear ADRC
线性自抗扰控制器的主要原理是:当系统有外部干扰输入时,系统实际对象和参考模型均有输出,将实际输出与参考模型输出进行作差,将输出差值进行等效处理后,反馈至输入端,实现对干扰的观测和等效补偿。与其它控制算法相比,线性自抗扰控制算法的优势在于在不影响系统原有稳定性的基础上,完成了对干扰力矩的观测和补偿[10-11]。另外,由于被控对象的实际模型中存在积分环节,线性自抗扰控制在对模型进行逆运算时,会带入微分环节,微分环节易将噪声放大,从而造成系统振荡,影响稳定精度。为了解决这一问题,引入了一个低频滤波器,用于消除微分环节造成的高频振荡问题。
扰动观测器(disturbance observer,DOB)是线性自抗扰控制器的核心部分,其将摩擦力矩、不平衡力矩、载体姿态扰动等外部所有干扰因素,统一看作成 “扰动总和”,将其看作为一个扩张的状态变量,通过对扰动观测器的合理设计,实现对“总扰动”的观测和估计,将估计值作为补偿量反馈至输入端,实现对总扰动的补偿[12-13]。
首先建立系统的扩张状态方程,表达式为

式中:状态x1表示角度;状态x2表示角速度;扩张状态x3表示干扰量。
可将扩张状态方程写成标准形式为

将状态x3表示为扰动的扩张状态量,为扩张状态方程构建扩张状态观测器为
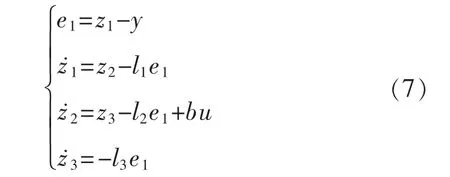
式中:z1、z2、z3分别为扩张状态x1、x2、x3的观测量,实现对扩张状态的估计。
该扩张状态观测器的特征方程可表示为

为保证状态观测器的稳定性,需要保证其特征值是负数,由特征方程可知,只需要保证ω0为正值,则特征值则为负数。在ω0为正值的前提下通过调整其数值,即可保证观测器稳定的前提下,调整观测器响应速度,完成对观测器的设计。
2.1 PD 控制器设计
系统控制器主要由PD 控制器和干扰观测补偿构成,通过干扰观测器实现对干扰量的估计,将干扰观测量补偿至系统实现对未知干扰量的补偿,为了进一步提升系统的鲁棒性和稳定性,控制器中同时引入PD 控制器。系统控制器的输出主要由干扰观测量和PD 控制器输出两部分构成,控制器输出可表示为[14]

式中:u表示PD 控制器,其表达式为[15]

式中:kP表示比例系数;kD表示微分系数。
系统的闭环传递函数可表示为


式中:ωc为控制系统的带宽,仅需要通过调整ωc,即可实现对系统响应速度的调整。ωc越大,系统的响应速度越高,响应的稳定裕度会降低,应保证足够稳定裕度的前提下,选择合适的ωc值。
至此,控制系统主要仅需要调整ωc、ω0、b03 个参数,调整参数实现了简化,便于在实际工程中获得应用。
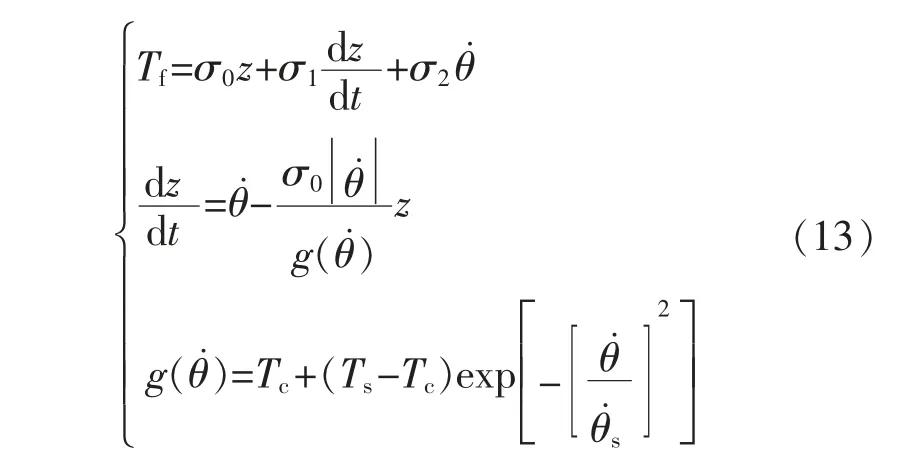
3 基于Lugre 的摩擦模型
为了进一步提升对干扰力矩的抑制,控制方案中引入Lugre 摩擦模型进行补偿。Lugre 模型是在鬓毛摩擦模型的基础上发展而来的,通过对摩擦模型的完善,其兼顾了摩擦的动态特性和静态特性,能够反应出摩擦力矩在预滑动状态下的特性[16]。Lugre模型能够同时反应出摩擦力矩在预滑动和滑动两个阶段的特征,对预滑动和滑动之间进行了平滑过渡,模型表达公式为[17]
为了能够获取摩擦力矩的具体估计值,需要辨识摩擦模型中的参数,摩擦公式中的参数主要分为静态参数和动态参数两类。其中,静态参数主要反应摩擦在滑动阶段的特性,动态参数主要反应摩擦在预滑动阶段的特性。静态参数的辨识主要利用电机转速与驱动电压之间的对应关系,平台进行匀速运动时,电机驱动力矩主要消耗在摩擦力矩上,通过实验测试出在不同转速下,电机的驱动电压值,从而拟合出平台转速和驱动电压之间的拟合曲线,利用拟合关系曲线推算出静态参数。动态参数反应的是摩擦预滑动状态的特性,其属于内部变量,无法进行直接的估算。可在预滑动阶段将系统近似看成弹性阻尼系统,利用预滑动发生的微量角位移和驱动力矩之间的关系对动态变量进行估计,预滑动状态下驱动力矩与驱动电压基本成线性比例关系,可利用驱动电压表示电机驱动力矩,利用微动角位移与电压之间的关系曲线实现对动态参数的估计。
引入Lugre 摩擦模型补偿后的控制结构如图5所示,在速度控制回路的基础上增加了摩擦补偿环节,以提升系统扰动的补偿速度,提高抗扰能力。
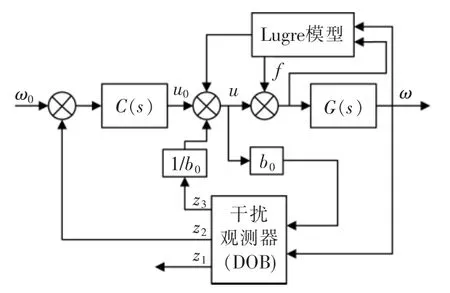
图5 引入Lugre 摩擦补偿后的控制结构Fig.5 Control structure after introducing Lugre friction compensation
4 测试结果
为了验证该稳定控制方案的控制效果,对平台进行摇摆干扰,测试在干扰状态下,平台的稳定精度。将平台安装于摇摆台,对摇摆台输入典型的正弦干扰信号进行测试,频率为2 Hz,幅度为1°,驱动摇摆台进行正弦摇摆晃动。稳定平台分别采用典型PI 控制器和上文所述基于自抗扰的复合控制器,对比两种控制器的干扰隔离效果,采集陀螺信号,获得两种控制器的稳定残差如图6所示。由图可知,基于自抗扰的复合控制器的稳定精度明显高于PI 控制器,与PI 控制器相比,平台稳定精度提升了20 dB左右。

图6 摇摆干扰隔离测试结果Fig.6 Test results of rocking interference isolation
将摇摆台的干扰频率从0~3 Hz 依次增加,测试多个干扰频率点下控制器的稳定性能,不同干扰频率下,与PI 控制隔离度相对比,复合控制器的隔离度统计如表1所示。由表中数据可知,在不同的频率干扰下,基于自抗扰的复合控制器均能表现出较高的稳定隔离度,验证了控制器在整个工作扰动频段内均能保持良好的抗扰能力。

表1 PI 控制和复合控制的隔离度对比Tab.1 Comparison of isolation between PI control and compound control
为了对比基于自抗扰复合控制与PI 控制器的阶跃响应速度和稳定收敛性,对两种控制器分别进行阶跃响应测试,响应结果如图7所示。由图可见,基于自抗扰的复合控制器超调量更低,系统稳定裕度明显更高,且具有较高的响应速度。
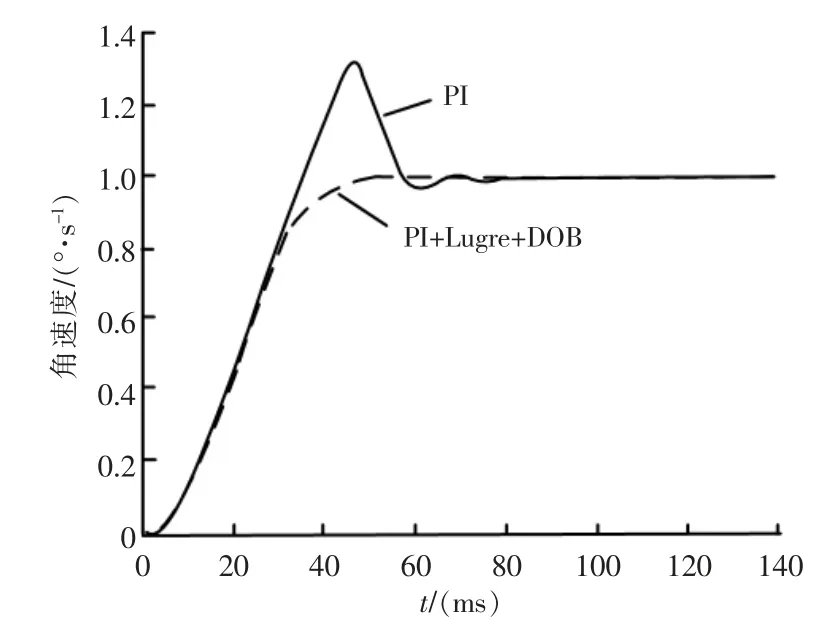
图7 阶跃响应测试结果Fig.7 Step response test results
5 结语
针对陀螺稳定平台的稳定控制问题,文中提出了一种基于Lugre 摩擦补偿模型和自抗扰控制算法的复合控制器设计方案,首先针对控制对象进行建模,对控制结构进行了论述,然后提出了线性自抗扰控制器的设计流程,另外为了进一步补偿轴系摩擦,引入Lugre 摩擦模型,并给出了模型参数辨识方法。最后,通过实际摇摆台干扰试验,验证了该复合控制器在工作环境中的整个干扰频段内均具有良好的扰动隔离能力。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
制造技术与机床(2018年11期)2018-11-23 01:08:02
意林(绘英语)(2018年1期)2018-04-28 01:21:42
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2015年19期)2015-04-09 11:32:56
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
