
一种基于VTD的智能驾驶仿真场景复现方法
2022-05-27 20:20王士焜张峻荧周正苏芮琦黄波
汽车科技 2022年3期
王士焜 张峻荧 周正 苏芮琦 黄波







王士焜
毕业于合肥工业大学,本科学历,现就职于国家汽车质量监督检验中心(襄阳),任智能网联系统部件仿真测试工程师,主要研究方向为智能网联系统部件仿真在环测试。
摘 要:趋于真实的仿真测试对于提高智能网联汽车开发效率具有重要作用[1]。随着实车路采设备精度的不断提高,利用实车采集数据在仿真场景中进行实车轨迹复现的仿真测试已成为一种有效技术手段。如何通过实车采集并处理后的数据在仿真场景软件中复现场景是难点。考虑实车采集成本和方案通用性,通过简易路采设备如摄像头和毫米波雷达,采集真实场景中关键参数进行场景复现。本文主要研究通过处理后的实车采集数据,在仿真软件(VTD)中复现场景,因此本文的研究具有重要的现实使用价值。本文通过采集数据对实车行驶的周围静态与动态环境进行较真实复现,然后通过RDB数据下发的方式控制虚拟车辆行驶。最后通过对仿真数据与实车数据对比分析,验证该方案的可行性。
关键词:场景复现;仿真
中图分类号:U467.5 文献标识码:A 文章编号:1005-2550(2022)03-0056-05
A VTD-based Intelligent Driving Simulation Scene
Recurrence Method
WANG Shi-kun, ZHANG Jun-ying, ZHOU Zheng, SU Rui-qi, Huang Bo
( Xiangyang Motor Automobile Testing Center CO., LTD, Xiangyang 441000, China)
Abstract: The simulation test that tends to reality plays an important role in improving the development efficiency of intelligent networked vehicles [1]. With the continuous improvement of the accuracy of real-vehicle road mining equipment, the use of real-vehicle-collected data to perform simulation testing of the real-vehicle trajectory reproduction in a simulation scene has become an effective technical means. How to recover the scene scene in the simulation scene software through the data collected and processed by the real vehicle is a difficult point. Considering the cost of real vehicle acquisition and the versatility of the scheme, through simple road mining equipment such as cameras and millimeter wave radars, key parameters in the real scene are collected for scene reproduction. This article mainly studies the data collected from the real vehicle after processing, and the scene scene is restored in the simulation software (VTD). Therefore, the research of this article has important practical value. In this paper, the surrounding static and dynamic environment of the real vehicle is reproduced more realistically by collecting data, and then the virtual vehicle is controlled by the way of issuing RDB data. Finally, the feasibility of the scheme is verified by comparing and analyzing the simulation data and real vehicle data.
Key Words: scene reproduction; simulation
1 緒论
智能网联汽车在落地前,需要经历大量的实车道路测试。目前行业认为一套自动驾驶系统需要测试110亿英里才能达到量产应用条件[2],这个里程道路测试很难达到且成本高。解决此难题的技术途径是虚拟仿真,通过大量的虚拟测试来完成算法开发和回归测试。为提升仿真测试场景的真实性、有效性,一般是将真实实车场景在虚拟环境中进行复现。目前实车路采主要有两种方案,其一是配套全套且精度高的传感器,基本能采集路侧相关信息,采集的数据需要经过多道转换程序转化,然后可能仍需要手动修改完善才可以形成测试用例,其成本之高,工序复杂。另一种方案是通过摄像头、毫米波雷达等简易路采设备采集关键参数,通过数据处理后,在仿真软件中进行复现。其中,如何通过有限的关键场景参数,在仿真环境中尽可能真实地复现实车道路场景和车辆轨迹是一难点。本文主要针对此难点进行分析研究,提出一种基于处理后的采集数据在VTD的仿真场景复现方法。
Virtual Test Drive(VTD)是一款提供复杂交通环境视景建模,为智能驾驶提供逼真场景的仿真软件。VTD能够支持复杂路网快速建模,包含复杂不规则路口,横纵向起伏,交通标识与信号灯,可以设置多车道、交叉路口、环岛、道路出口/入口、坡道匝道等,同时具备交通工况仿真能力,特别适用于L3以上智能驾驶在复杂道路交通环境下的仿真测试需求。
2 仿真场景构建
采集车采集的多为典型的片段场景,如跟车、前方车辆变道、树荫下行驶。采集典型片段场景时,采集车大多是在无变道无转弯的情况下,且基本行驶在车道中间。本文假设主车(采集车)行驶在车道中心,根据实车采集的轨迹数据和实车视频进行静态场景搭建,其主要还原道路及周围环境,其次进行动态场景搭建,主要是还原交通车、行人及其运动轨迹。从采集车传感器提取场景数据时,需要将主车数据和交通车数据进行时间轴和频率的统一[3],最终提取出主车轨迹数据、交通车轨迹数据、车道宽度和车载视频,提取数据和处理数据的方法不在本文论述内,故不作描述。
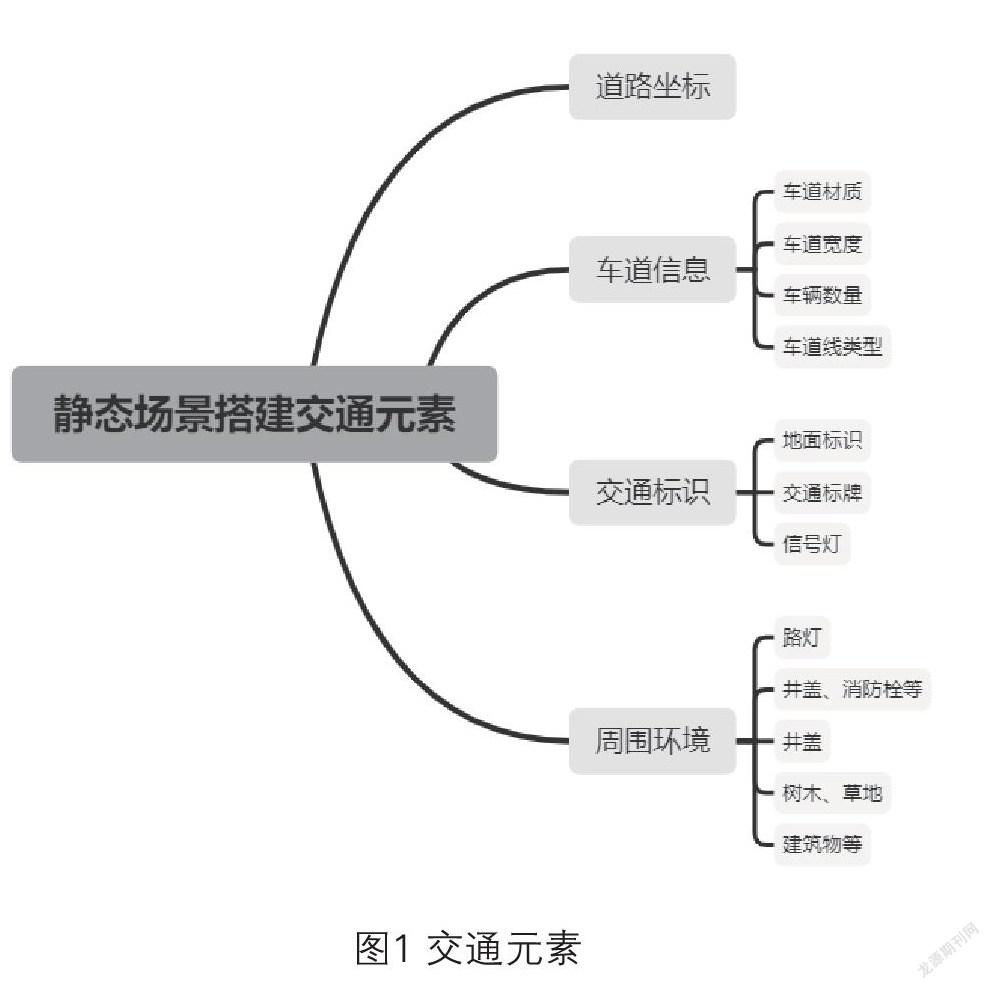
2.1 静态场景搭建
由于实际道路场景交通元素无法穷尽,为高效完成实车场景复现,需明确各个交通环境中共性交通环境元素[4],交通环境要素见图1。
通过采集车采集的主车轨迹数据、车道宽度、车载视频等,按照以下步骤进行静态场景搭建。
2.1.1 道路搭建
首先将采集车即主车的轨迹数据,按固定周期提取轨迹点的XYZ坐标,按图2所示格式制作成TXT文件并导入VTD。按照上述主车行驶在车道中心线的假设,此轨迹在真实中为当前车道的车道中心,而按VTD的道路逻辑,此轨迹线应被作为道路中心,即lane00。车道的添加方式是从道路中线开始往外加的,因此需根据主车的行驶车道及车道宽度,修改车道lane00偏移;
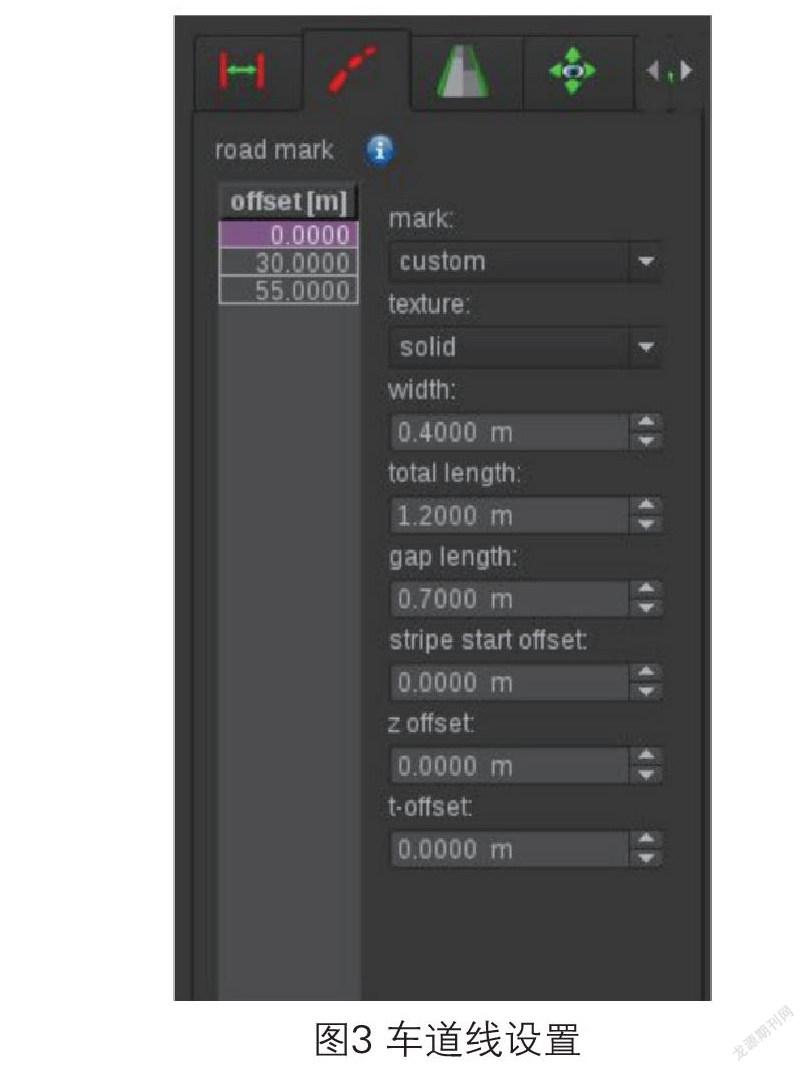
其次,根据传感器采集的车道宽度数据和车载视频容易得到的车道数量、车道线类型等,在VTD中进行相应的设置。车道线宽度、间隔等可参考国家标准[5],图3为VTD中车道线设置界面。
2.1.2 交通标志添加
对于一些难以获得或需要大量的采集成本才能得到的道路参数,如交通标线、交通标牌的尺寸、位置、朝向,尺寸和朝向可参照国家标准[6-7]进行手动添加,见图6,图7。
2.1.3 景观绿化添加
对于路侧的路牙、草地、树木及其它三维物体,其尺寸和位置都可参照实车视频进行人工目测估算添加,尽可能地还原场景内容的真实性。
2.2 动态场景搭建
2.2.1交通车添加
基于静态场景中搭建的道路,首先根据采集车采集的车辆轨迹、车辆速度、车辆朝向角数据,在ScenarioEditor设置主车与交通车的XYZ坐标和朝向角Heading 。通过车载视频人工目测交通车的外观,但受限于采集成本,无法得到交通车的尺寸,因此在选择主车与交通车车辆外观模型时,第一选择为VTD中自带与之类似的车辆模型。对于中国实际道路上比较常见的车辆,如面包车、大挂车,但VTD中无对应且类似的车辆模型。可按照VTD车辆模型导入规则进行自行搭建车辆模型并导入,下图4为某款实际搭建车辆模型。
2.2.2车辆轨迹复现方案分析
通过实车采集的其他车辆的位置速度等参数,如何将采集车和周边车辆的轨迹精准复现到仿真场景中,首先对下图VTD中车辆控制逻辑进行分析。
根据上述VTD中车辆控制逻辑,如果通过“控制行为”,即控制车辆的加减速,经过VTD车辆动力学,实时计算出车辆在下一时刻出现的位置姿态和速度。交通车的动力学无法通过采集车获取,导致虚拟车辆与实际车辆的动力学无法保持一致,且细微的区别便可导致动力学计算的位置姿态和速度与实车道路采集的不一致。当不经过VTD车辆动力学,直接向虚拟车辆下发实车采集的轨迹数据-位置、姿态和速度,便可实现虚拟车辆的行驶参数与实车一致。
VTD提供丰富的接口便于与第三方程序通信。Runtime Data Bus(RDB)是VTD各个模块通过TC(TaskControl为VTD整个仿真的中心管理单元,管理仿真时间和数据流)和外部进行通信的数据格式之一。RDB数据不仅可以用来实时监测车辆行驶时各参数,而且可以通过RDB数据下发车辆参数,从而控制车辆行驶,因此可以考虑通过RDB下发数据控制虚拟车辆。
针对基于实车采集的车辆行驶参数表并结合VTD车辆控制逻辑使用C++开发RDB下发程序,RDB下发数据的程序需求是得到固定周期车辆位置、姿态、速度信息的csv文件,首先建立通訊连接,确保可以将数据通过此程序发给TaskControl,其次,逐步解析RDB数据结构,得到RDB_Object_state_t数据包。再次,从csv文件中提取位置、姿态、速度等数据。最后,将数据赋给VTD虚拟车辆。
3 仿真验证
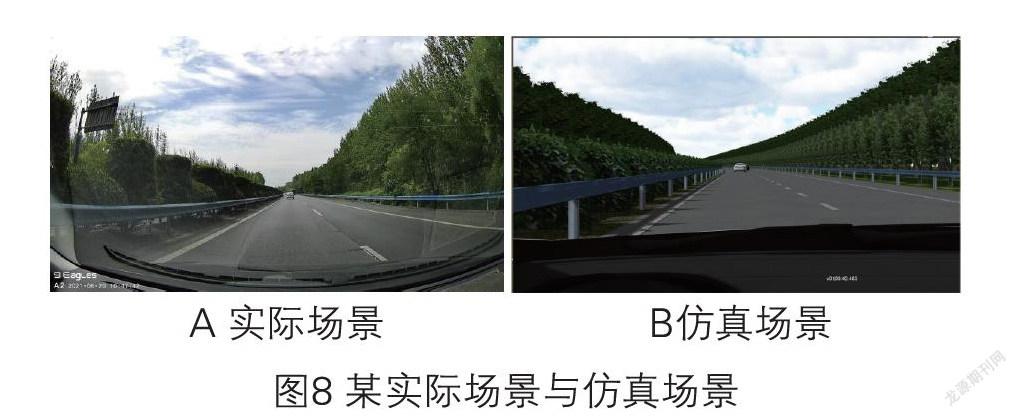
首先根据上述场景搭建方法将实车场景进行虚拟搭建。可以看出,基于本文论述的场景搭建方法可以将实际场景进行高度还原,图6为路侧有交通标牌的实车场景,图7为其在虚拟环境中的仿真场景;图8为另一片段场景的实车场景与仿真场景。
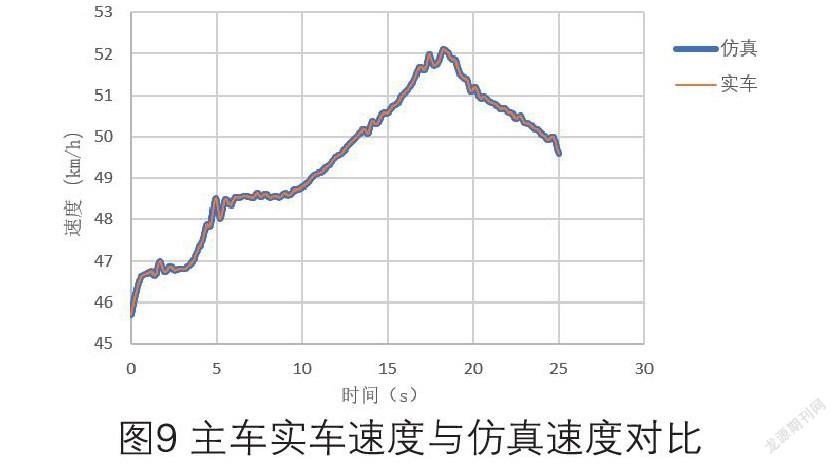
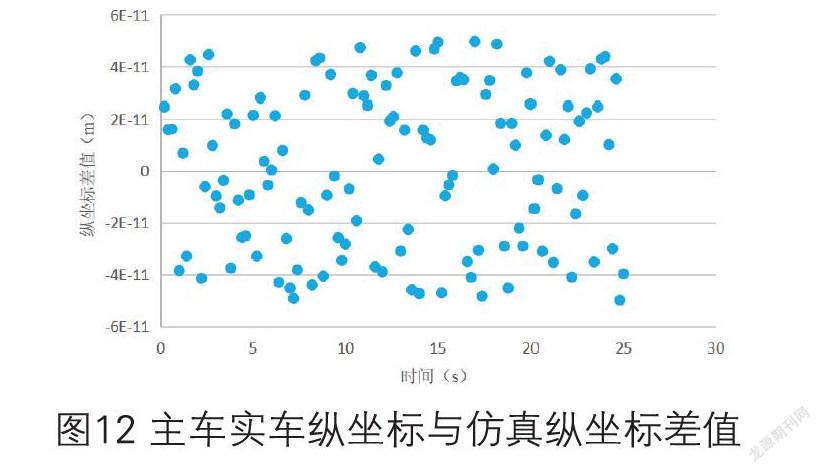
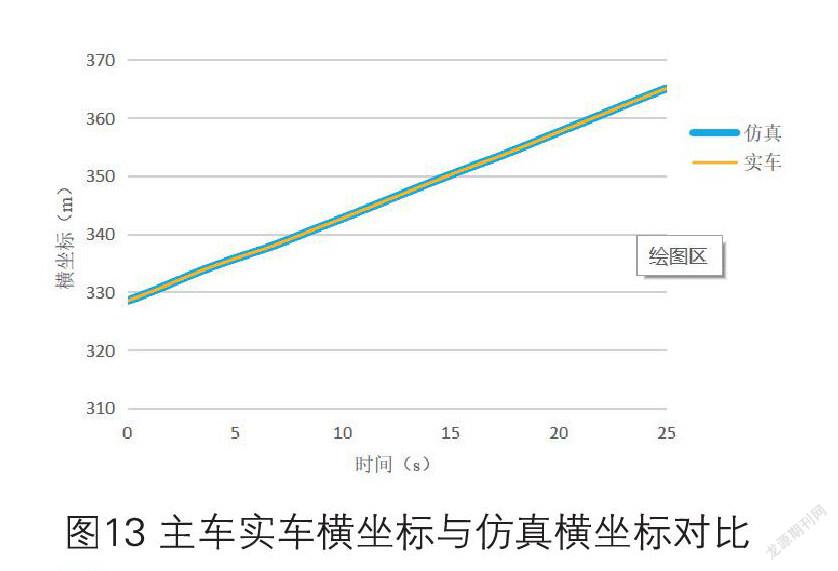
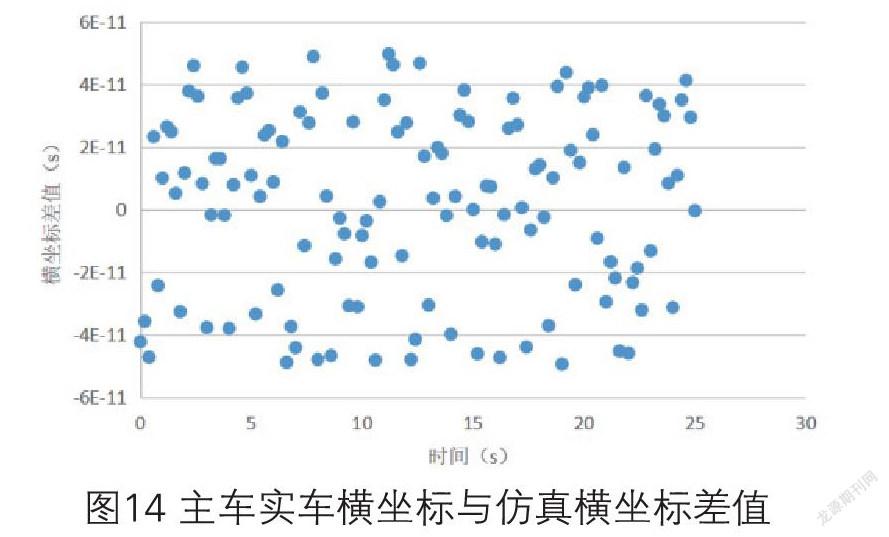
通过RDB下发程序控制虚拟车辆在每时刻的位置、姿态和速度。最后通过VTD中RDBsniffer工具记录虚拟车辆的主要行驶数据,如车辆速度、车辆横坐标、车辆纵坐标,将仿真数据与实车采集数据对比,得到下图:
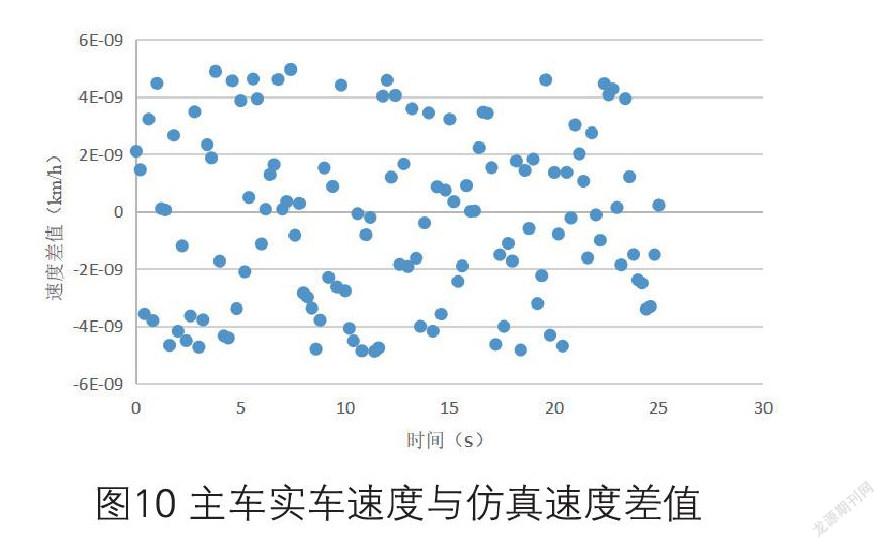
从图9、图11、图13,可以看出车辆行驶关键参数(车辆速度、车辆横坐标、车辆纵坐标)在仿真复现中的结果与实车采集数据有着高度一致性。从图10、图12、图14,可以看出仿真复现中车辆速度、车辆横坐标、车辆纵坐标与实车采集的速度、横坐标、纵坐标的差值基本为0。
因此,从上述仿真测试数据与实车数据对比,可以得出通过上述场景搭建方法能较好地还原实车采集场景并可以将实车行驶参数在仿真环境中高度还原,但由于实车采集平台与仿真平台的数据精度不一致,导致仍存在细小误差,但误差在后续真实传感器在仿真与实车对比的工作中是可接受的。
5 结论
本文通过对基于VTD仿真场景复现方法的研究,介绍了基于实车采集关键场景参数进行仿真搭建的方法,提出对实车车速和轨迹复现的RDB方案,并对某实车采集场景进行复现,并将仿真结果与实车采集数据进行了对比分析证明了RDB方案的可行性。
由于真实道路驾驶面对的环境往往是复杂多变的,多种实车工况未考虑,后期研究将考虑以下方面:
(1)环境光照对测试结果影响较大,较好复现实车周围环境光照难度较大,如夜晚光照复杂,车灯、路灯、建筑内灯光等。
(2)采集车不可能完全处于车道中心,存在向两侧偏离的情况,后续应考虑。
参考文献:
[1]朱冰,张培兴,赵健等.基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报,2019,32(6):1-19.
[2]张永平,钟翔平.中国自动驾驶仿真蓝皮书[R].2020.
[3]庄琼倩,陈波,吴贤静.基于Perscan的自然驾驶场景构建与研究[J].智能网联汽车,2021,7:30-31.
[4]陈套,蔡博,回春.基于场景元素的智能网联汽车场景构建研究[J].公路与汽运,2019,195:9-12.
[5]GB 5768.3-2009,道路交通标志和标线.第3部分:道路交通标线[S].
[6]GB 5768.1-2009,道路交通标志和标线.第1部分:总则[S].
[7]GB 5768.2-2009,道路交通标志和标线.第2部分:道路交通标志[S].
猜你喜欢
当代陕西(2022年4期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
小猕猴学习画刊(2022年3期)2022-03-28
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
课堂内外(小学版)(2017年3期)2017-04-15
读写算·高年级(2015年1期)2015-07-25
小天使·四年级语数英综合(2011年4期)2011-06-30
人民周刊(2009年12期)2009-01-25
