
面向儿童外骨骼机器人优化设计的人机系统运动分析
2022-05-25 04:13:00王紫荆王艺霖王红伟周林邱静黄璞玉
人类工效学 2022年1期
王紫荆,王艺霖,王红伟,周林,邱静,黄璞玉
( 1.电子科技大学 机械与电气工程学院,成都 611731;2.电子科技大学 自动化工程学院,成都 611731;3.北京航天测控技术有限公司,北京 100041)
1 引言
康复机器人是医用机器人的重要分支,是康复医学领域的一个研究热点[1]。近些年来康复机器人在成人康复治疗中取得了很大发展,而在儿童康复领域的研究还处于初级阶段。目前的儿童康复机器人主要针对自闭症和脑瘫患儿,如Made for Movement 开发的NF-Walker 机器人,是一种针对脑瘫儿童设计的混合型辅助机器人[2];Lokomat 是由Hocoma AG 公司研究生产的步态辅助型机器人目前已被许多医疗机构广泛引进使用[3];针对脑瘫儿童设计的机器人辅助步态训练运动系统Gait Trainer GT-1RehaStim旨在通过重复训练改善患儿行走步态[4-5];ATALS 是具有6 自由度且专为四肢瘫痪儿童设计的一款下肢康复机器人[6];可穿戴踝膝外骨骼机器人WAKE-up[7-8]是一多关节下肢康复机器人;CPWalker[9]是一种基于跑步机的康复型机器人外骨骼,旨在为患有脑瘫的儿童进行康复训练。国内市场有法国Nao机器人、英国Kasper机器人,德国儿童康复机器人系统-LokoHelp系统等[10]。由于儿童大脑神经系统较成人来说可塑性程度更高,成长空间更大,研究结果显示下肢外骨骼机器人在儿童康复训练中的运动能力改善效果更优[11]。但目前有关机器人辅助患儿步态训练的相关临床研究还很初步,对于外骨骼机器人是否能够有效改善脑瘫患儿步行能力问题上,仍然存在争议。本文针对该问题,对AIDER儿童外骨骼机器人步行状态下的运动功能及步态影响进行了研究,为后续外骨骼机器人在患病儿童的步态训练应用提供一定的研究基础和参考资料。
2 方法
2.1 受试者
在本实验中有14名研究对象,7位女性儿童,7位男性儿童,认知正常,身体健康无残疾,实验已获得受试儿童监护人同意并签署知情同意并由电子科技大学伦理委员会批准。14名受试儿童的基本生理参数如表1所示。

表1 受试儿童的基本生理参数信息
2.2 仪器设备
实验基于AIDER儿童外骨骼机器人实际系统进行验证,图1为AIDER儿童外骨骼机器人示意图,整机具有4个电机、4个绝对编码器、1个主控板和1个电源以及多组传感器等;髋、膝关节具有主动驱动力,踝关节有一个被动驱动器,整个系统具有8个自由度。AIDER儿童外骨骼机器人在腰部和腿部为可以进行尺寸调节的伸缩杆,因此能够根据不同身高体型穿戴儿童的身体生理参数适时的对臀部宽度、大腿长度、小腿长度以及足部大小进行调节,适合年龄在5-12岁,身高在105 cm-150 cm,体重在19-45 kg的儿童使用。
本次实验采用8个OML公司开发的Vicon MX红外高速运动捕捉摄像头、2块美国生产的AMTI三维测力台进行数据的测量与采集。由于实验主要针对人体步行运动数据进行采集,因此选取摄像头采样频率为100Hz,测力台采样频率为1000Hz。
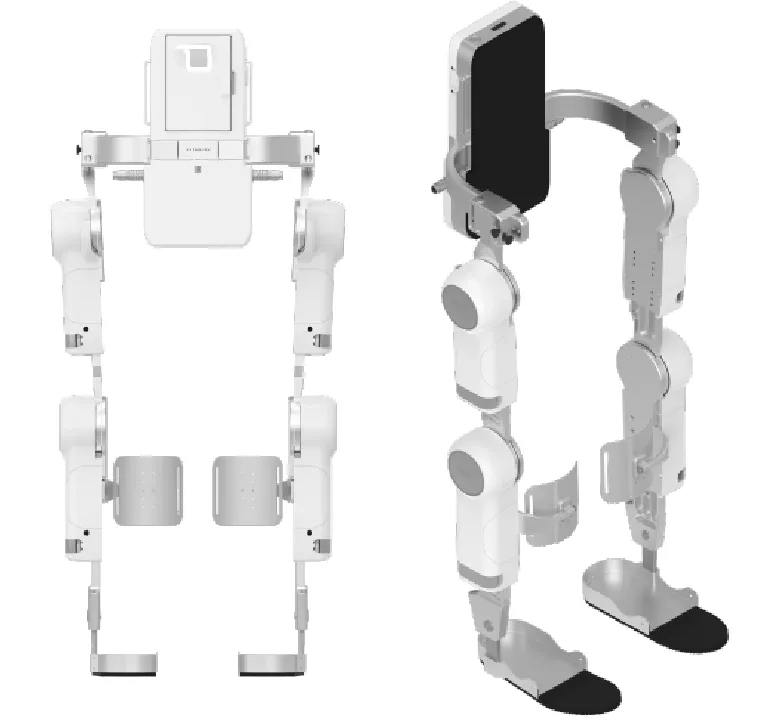
图1 AIDER 儿童外骨骼机器人
2.3 实验过程
本次实验过程采用自身对照,在相同实验环境、实验路段下,同一实验研究对象需要在未穿戴条件下进行10次10MWT(10-Meter Walk Test)测试,穿戴外骨骼机器人条件下进行7次10MWT测试,实验中,考虑到穿戴外骨骼机器人行走时实验对象上肢需要使用拐杖用力支撑地面,儿童上肢力量较弱,在反复行走中容易产生肌肉疲劳和不适,易发生摔倒等损伤,对数据的有效采集产生不利影响,所以在执行任务时减少了行走次数,仅完成7次10MWT测试。记录每次执行步行任务时的角力稳定值、步态对称性参数以及行走时长,对两次采集到的数据分别进行分析与计算,在此基础上再进行穿戴与未穿戴数据的对比分析,10米实验路段的具体标记点与计时点如图2所示,实验数据采集步骤如图3所示。
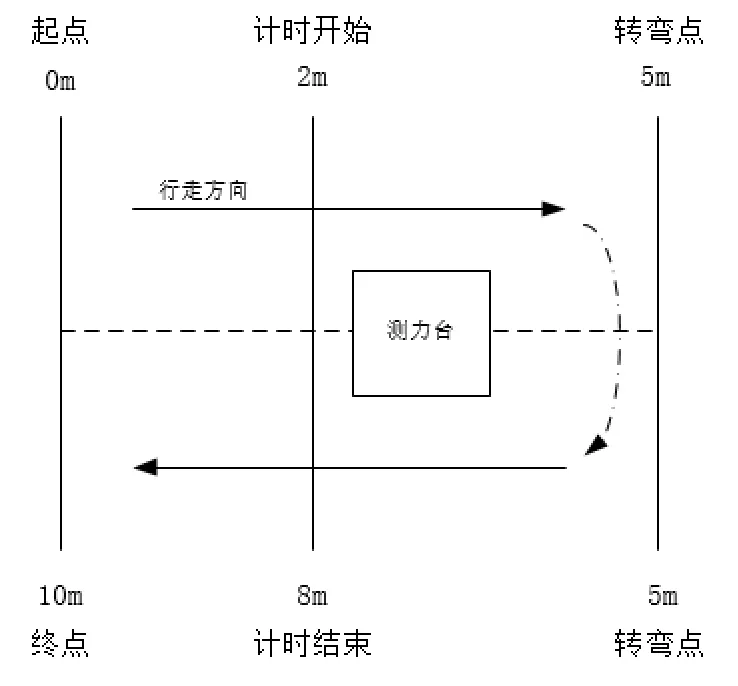
图2 10MWT实验过程示意图

图3 实验数据采集步骤示意图
2.4 实验模型
实验选择PlugInGait Lowerbody模型,用于Vicon动作捕捉系统对人体下半身进行实验数据采集,实验对象下半身黏贴点共计16个,穿戴和未穿戴条件下16个黏贴点位置相同,具体位置如图4所示。

图4 下半身16个黏贴点位置标记示意
2.5 数据收集与处理
使用Vicon Nexus 3.3.9系统软件对采集到的运动数据进行预处理,完成实验对象未穿戴与穿戴外骨骼机器人两种条件下下肢髋、膝、踝关节角度、关节力等数据的分析与计算;使用Matlab R2017a对采集的运动数据进行处理,完成下肢髋、膝、踝关节三维运动角度、关节力及运动轨迹等的制图;使用Python 3.6.8对采集的所有步态数据进行处理,完成归一化力角稳定值、步态对称参数的分析与计算;使用Excel 2016软件对实验中采集到的数据进行完整周期的拾取以及时相统计并进行步态时间参数及时相等参数的绘图;采用SPSS 25.0对大量实验数据进行数理统计与分析,根据不同的分析目的运用均值分析、单个样本t检验以及方差检验对实验数据进行计算以及统计学绘图,其中若P<0.05,认为差异有统计学意义。
3 结果
(1)人机运动稳定性
图5是同一实验研究对象穿戴儿童外骨骼机器人在三种不同速度下执行行走任务时的归一化力角稳定值曲线图,从曲线变化趋势上看,三条曲线变化特点相近,在外骨骼机器人行走中均呈现出稳定的周期性,在半个步态周期内,力角稳定值先呈增加趋势,在约1/2步态周期处出现极值,后逐渐下降。由于随着实验对象对儿童外骨骼机器人使用熟悉度的提升,实验对象在穿戴外骨骼机器人条件下的行走速度逐渐变快,从而引起儿童穿戴外骨骼行走时下肢摆动速度增加,相应的外骨骼机器人的行走运动稳定性变差,但整个行走过程中力角稳定值时刻大于0,说明外骨骼机器人在平地行走过程中,一直处于稳定状态。
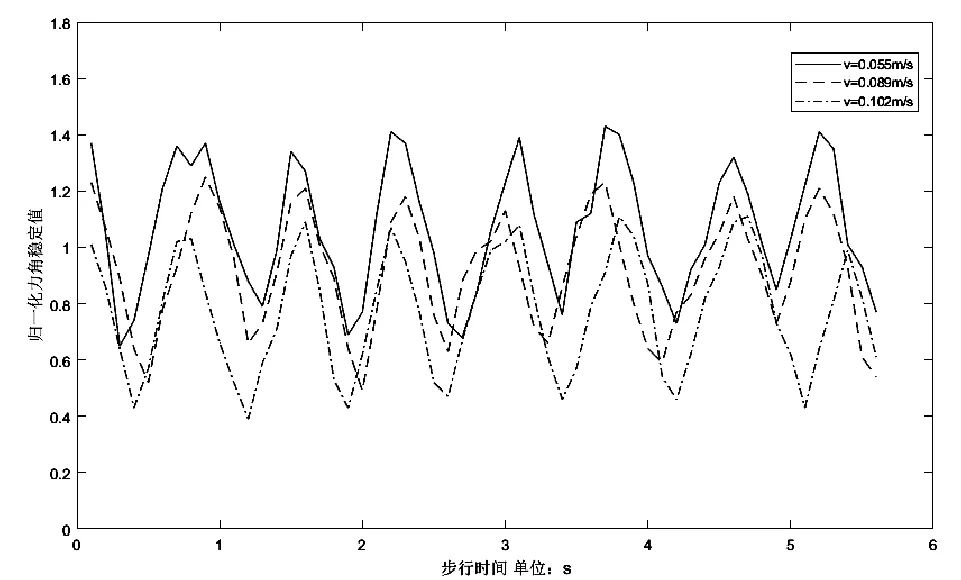
图5 穿戴儿童外骨骼机器人条件下步行运动归一化力角稳定值
(2)步态对称性
从图6中可知,受试者在不穿戴外骨骼机器人行走状态下左右双腿的步态时相对称性参数IDps>0.9,对称性较高,而穿戴条件下实验对象左右双腿的步态时相对称性参数0 图6 儿童未穿戴与穿戴AIDER儿童外骨骼机器人时相对称指标 分析图 由图7可知,实验对象在穿戴儿童外骨骼机器人条件下的步长、跨步长对称指标IDsd、IDsp与未穿戴条件下的步长、跨步长对称指标有明显差异,但穿戴条件下步长对称性指标IDsd和跨步长对称指标IDsp接近或大于0.8,说明此时实验对象左右双腿步态有良好的对称表现。 图7 儿童未穿戴与穿戴AIDER儿童外骨骼机器人步长、跨步长对称指标分析图 本文从外骨骼人机稳定性和步态对称性参数指标来对AIDER儿童外骨骼机器人的步行状态下的运动功能进行评估,选取的指标有限,评估并不完全全面。此外,实验设备、实验人员也存在一定的限制,仍有可以改进的空间,具体改进方向有: (1)扩展外骨骼系统稳定性、平衡性方面的评估参数,如利用ZMP稳定性判据等参数来对儿童穿戴外骨骼机器人前后的行走平衡进行评估。 (2)本文对儿童外骨骼步行功能的评估仅从步态这一小方面进行了分析与研究,实际在医疗场景中,步态评估除步态之外,还包括患儿心率、耗氧量、肌电特征等方面,通过这些评估层面拓展可以得到更全面的评估结果。 (3)实验受试人群仅为健康儿童,虽包括了不同年龄、性别、身高及体重的受试人群,但整体实验对象单一,条件限制未能对脑瘫儿童进行穿戴条件下的步态评估。因此,后续可对脑瘫患儿进行AIDER儿童外骨骼机器人临床数据的采集与分析工作,可能会对后期脑瘫康复机器人的研究提供更有参考价值的数据资料和研究基础。 (1)人机运动稳定性 利用力角判据和整个行走中穿戴者摔倒次数来对AIDER儿童外骨骼机器人系统的稳定性进行评估。实验对象穿戴AIDER儿童外骨骼机器人在较为平整的路面行走时,步速对外骨骼运动稳定性会产生一定的影响,随步速的增加稳定性会稍变弱但不同速度下的力角稳定值在整个过程中均时刻大于0,说明外骨骼机器人在平地行走过程中,一直处于稳定状态。 (2)步态对称性 结合步态对称性参数的分析结果可以得出,儿童穿戴AIDER儿童外骨骼机器人条件下的左右双腿步态对称,虽与不穿戴外骨骼机器人自然行走状态下的三种对称性指标有一定差异,但儿童外骨骼机器人步态对称性较好。 综上所述,儿童外骨骼机器人在不同速度下一直处于稳定状态且步态对称性较好,初步实现儿童在行走过程的辅助作用,能对不良步态进行纠正。

4 讨论
5 结论
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
军事文摘(2024年6期)2024-02-29 09:59:38
数学物理学报(2022年4期)2022-08-22 04:06:30
中学生数理化·中考版(2021年10期)2021-11-22 07:26:38
昆明医科大学学报(2021年8期)2021-08-13 08:59:56
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
读写算·小学中年级版(2016年5期)2016-05-14 19:04:50
