过境柴油车不透光烟度遥感测量方法研究
2022-05-25 02:55郭晓霞张金永侯艳霞
绿色科技 2022年8期
汪 锋,张 涛,郭晓霞,张金永,侯艳霞
(天津同阳科技发展有限公司,天津 300384 )
1 引言
机动车排放已成为我国空气污染[1]的重要来源之一,是造成细颗粒物[2]、光化学烟雾[3]污染的重要原因。
《中国机动车环境管理年报(2018)》显示,北京地区移动排放源[4]对颗粒物浓度[5]贡献上升到45%。在机动车污染中,柴油车[6]和非道路移动源[7]排放问题最突出,占汽车保有量7.8%的柴油货车,排放了77.8%的颗粒物(PM),由此可见,搞好汽车尾气排放污染防治,柴油车的排放管控至关重要;而柴油车的尾气排放防治中,中型、重型货车和大型客车的尾气排放[8]管控是重中之重。
柴油车多为货车,车辆长度区间大,载货[9]与空载[10]对污染物排放的影响大;其排气管位置多样,其中很大一部分并不露出车体,隐藏在车底中部或中前部;其排气方向分为侧向排气和水平向下排气。这些因素给柴油车的遥感测量[11,12]带来了非常大的麻烦。
本文提出一种过境柴油车不透光烟度[13]遥感测量方法,通过软硬件的协调,解决过境柴油车测量效率[14]、测量精度[15]等问题。
2 方案与方法
2.1 当前现状
当前过境柴油车基本上都是采用人工接触式检测,对机动车排气管采样,通过仪器分析得出检测数据,这种检测方式普遍存在以下问题:
(1)检测效率低:每辆车的检测时间在3~5 min。
(2)车辆易拥堵:因为检测需要一定时间,所以会造成车辆拥堵问题。
(3)人员配置多:每个检测点位需要多名检测人员,协同操作,才能完成测量。
(4)测量较困难:车辆尾气排口的位置不固定,传统的遥感检测设备从技术原理上决定了无法实现对排气口不统一的大型车辆尾气的检测,同时,手持式设备造成检测人员操作不便。
(5)身体危害:检测人员直接接触机动车尾气,会对身体健康造成伤害。
2.2 系统方案
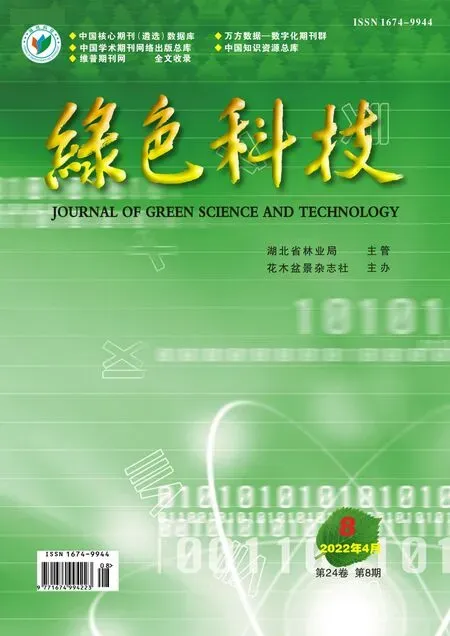
本文结合现场实际情况,给出一种新的过境柴油车不透光烟度遥感测量方法。目标是建立新型的“高排放柴油车遥感筛查执法检测站”,改变原有将遥感检测设备安装在马路上进行检测的方式,采用“遥感执法检测站”检测、筛查、分流、处理的一体化设计方案,克服了原有遥感检测方法“忽视”高排放柴油车检测的缺点,通过遥感检测装置筛查高排放车辆,通过人工检测对筛查出的超标车辆进行处理,全自动化检测、筛查、分流、处理,充分发挥遥感检测快速高效与人工检测现场执法处理的优点,实现对大型/重型柴油货车和客车尾气排放有效管控的目标。整体系统如图1所示。
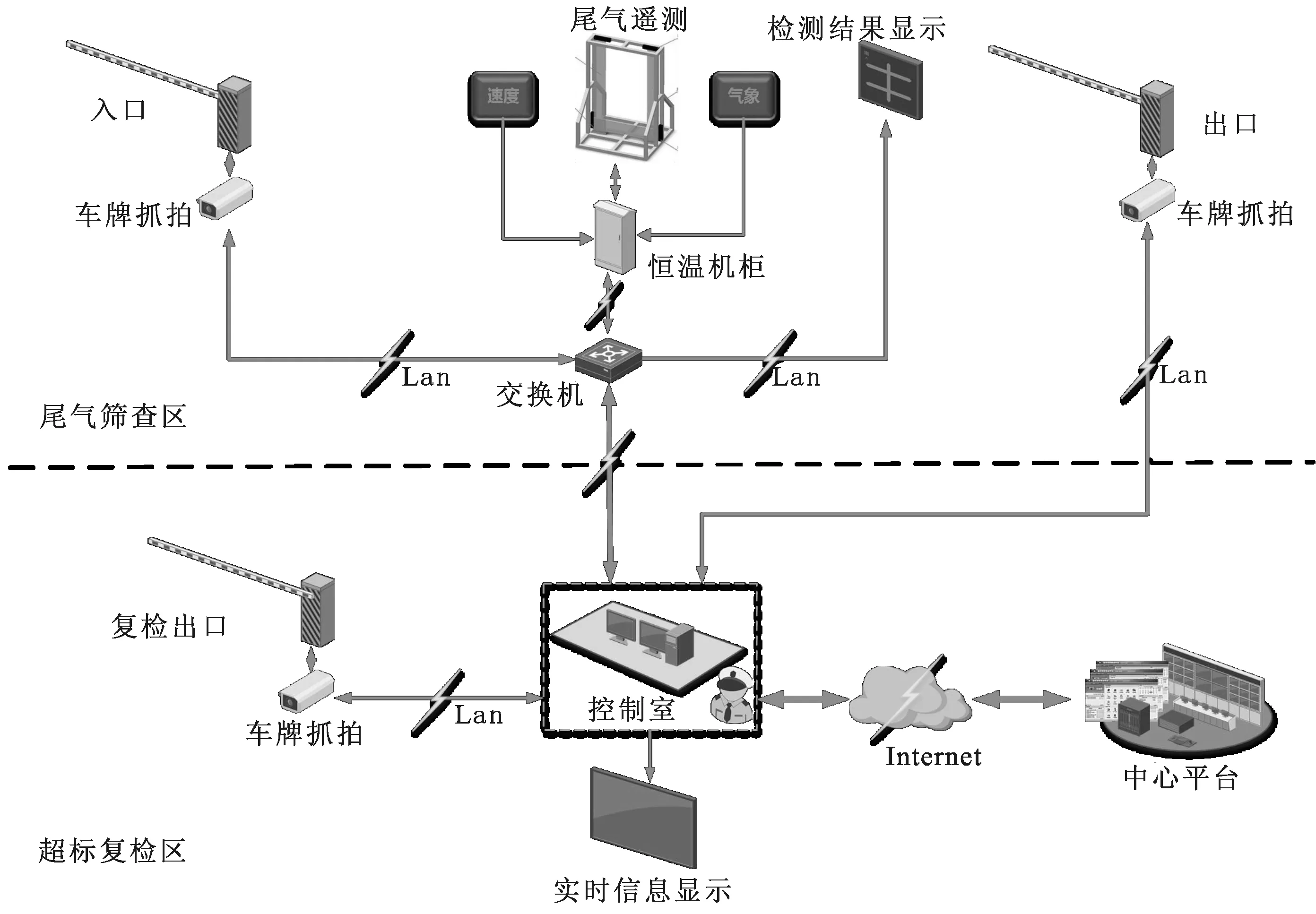
图1 遥感检测系统
在具体的实施过程中,在过境站点处建设一定角度的坡度,以模拟柴油车踩油门状态,在坡度的合适位置建立矩阵式柴油车尾气遥感检测仪,采集柴油车加速状况下排出的烟气。考虑到过境站点一般远离市区,环境比较恶劣,在检测点处加装蜂窝遮阳防风矩阵,以消除环境因素的干扰。参考示意见图2~4。
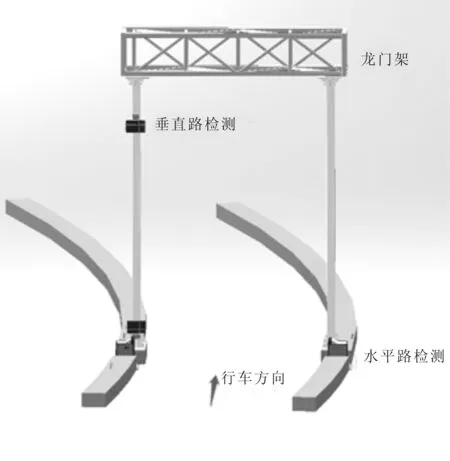
图2 现场路况及设备架设示意
2.3 计算方法
数据采集主要由光电二极管组成,其主要接收来自遥测辅机端的光度值。采集24个光电二极管输出的电流值,准换成电压值,并进行均值滤波,线性校正。
图3 现场坡道示意

图4 现场遮阳蜂窝矩阵示意
每个光电二极管电流值转换成电压值的过程中,受到激光的均匀度,采样电阻的精度、放大电路的精度等各种因素的综合影响,导致每一路的数值都不一致、为了减少这种不一致性的影响,采用了数据归一化处理。这样处理后,数据反应的是每个光电二极管光度值变化的百分比。
入射最大光度值=环境光度值+激光光度值。
在设备进行光度矫正时,分别测量环境光度值和入射最大光度值,并计算出环境光度占入射最大光度值的百分比,和激光光度的百分比,即激光的透光率。
环境光占比=(环境光度值/入射最大光度值)%。
激光光占比=(1-环境光占比)%。
实时测量光度时,计算出实时入射光度值的变化百分比,再计算出入射激光的实时激光透光率。
实时激光透光率=实时入射光度值/入射最大光度值×激光光占比。
每次使用测量装置前都要进行光度设置,设定入射最大光度值,环境光度占比。在使用过程中,由于环境光强弱的变化,假设激光光度保持不变,在测量过程中要对环境光度占比进行修正。
数据分析模块将上述过程进行汇总,判断车辆经过、遮挡、车轮、烟团位置等详细信息。
前端主控根据收到的信息,将车型、尾气烟团位置等在软件上展示处理,并辅以判断烟团浓度是否位于对应车型的排气管处。图5是数据采集和分析模块对采集到的数据进行处理后的波形图,从图5中可以看出:车辆轮廓是6排轮车辆,烟团吸收位于第二和第三排车轮后(图中波形吸收处)。根据此波形图绘制的车型如图6所示,此车型尾气管确实位于第二排轮之后,排烟最大应在第二和第三排轮之间,和实际相符。
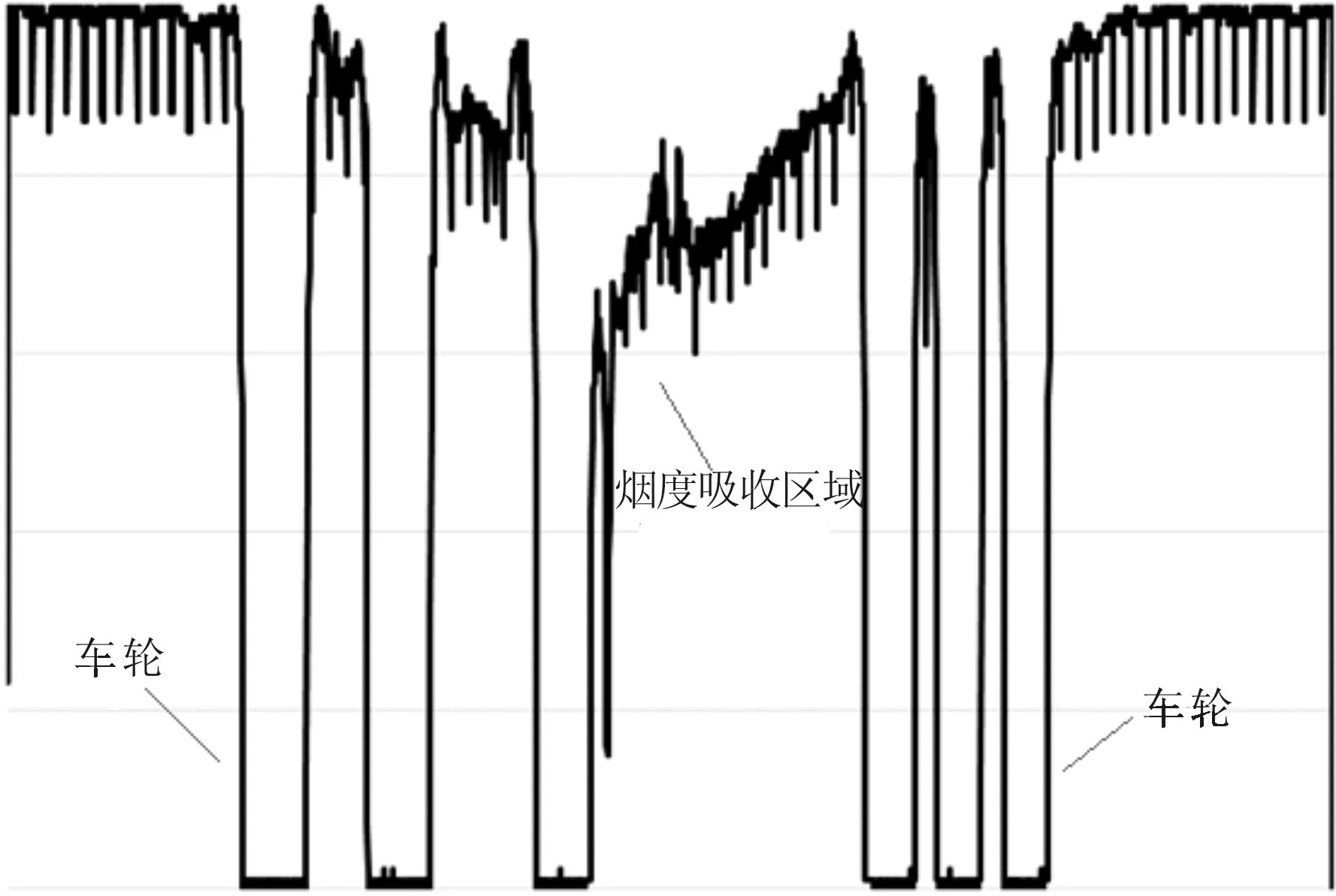
图5 数据采集示意
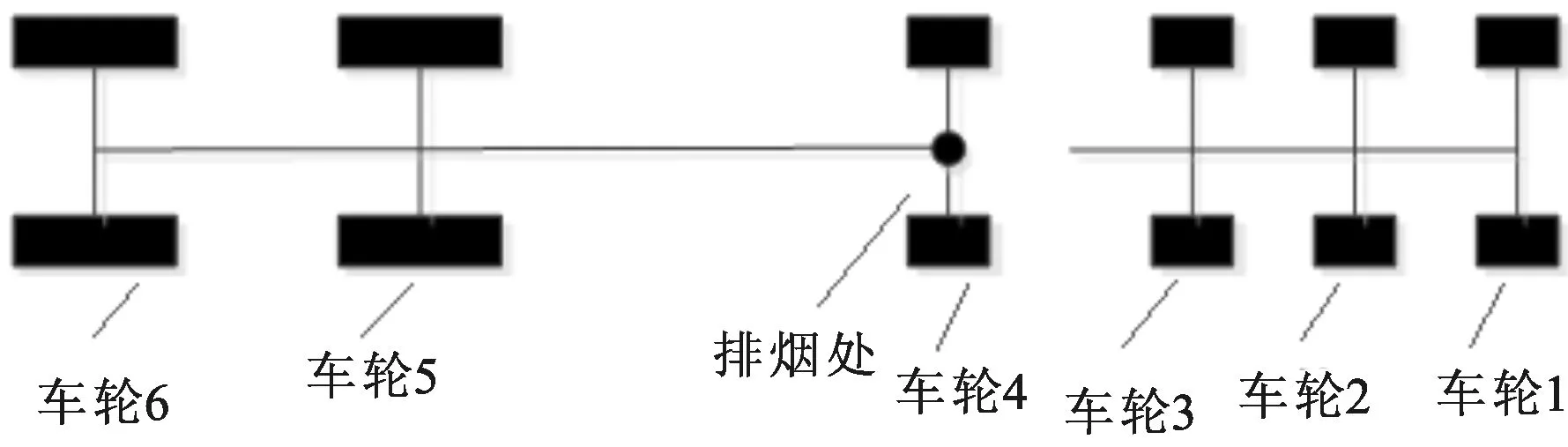
图6 车辆轮廓
3 结果与讨论
针对上述方法,考虑对遥感测量的不透光烟度与手持式不透光计测量的光吸收系数做一个对比。在国家标准中,针对柴油车测量不透光烟度>30%属于超标,而光吸收系数则是>1.1则判断为超标。
选择15 d的遥感测量数据,筛选出不透光烟度>30%的车辆进行手工不透光烟度计复检,看光吸收系数是否>1.1,以此评价复检不合格率;同时从遥测合格的车辆中每天抽检20辆,用手工不透光烟度计测量光吸收系数是否超标看误检率。
以实际某一个过境柴油车站点为例的数据对比如表1所示。
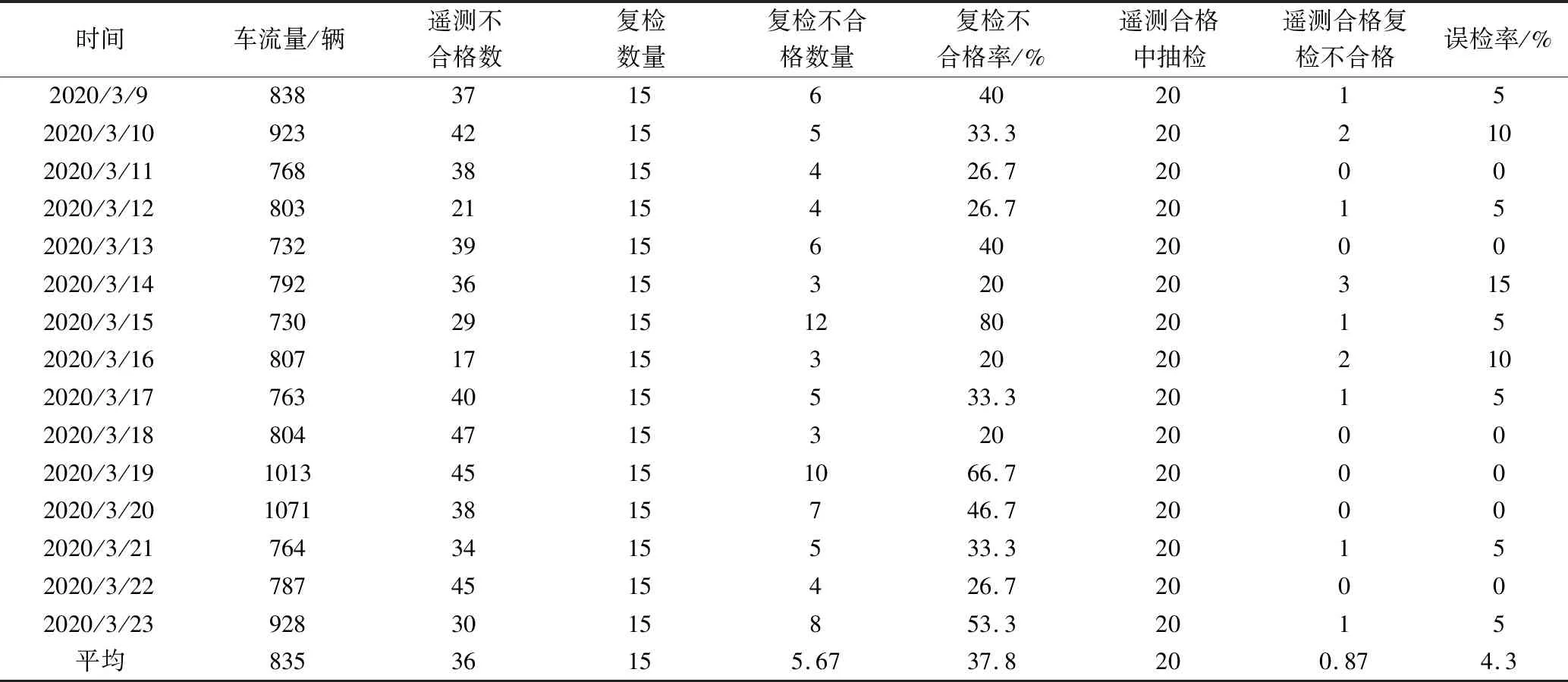
表1 某过境柴油车站点数据
4 结论
本文提出了一种过境柴油车不透光烟度遥感测量方法,通过增加坡度、蜂窝遮阳矩阵、矩阵式遥感检测设备,再通过算法优化,提取出车辆轮廓图、车辆尾气浓度排放位置等信息,综合判断柴油车是否超标。
通过实际数据对比可知,目前遥感检测方式测量不透光烟度和手工不透光烟度计测量光吸收相关性还不是非常高。遥感检测不透光烟度大于30%且手工不透光烟度计测量光吸收大于1.1的吻合率只有37.8%。
但从另外一个指标漏检率来评判,遥测中合格车辆抽检,是否存在超标车辆,本文提出的方法可以控制漏检率在4.3%。
综合以上,遥感检测可以达到一定程度的筛查目的,减少现场人员工作量、提高工作效率、降低工作人员的身体伤害等。
猜你喜欢
金沙江文艺(2022年4期)2022-04-26
花火A(2018年9期)2018-11-26
儿童故事画报·发现号趣味百科(2018年1期)2018-11-14
新能源汽车报(2018年40期)2018-05-14
中国新技术新产品(2017年5期)2017-03-20
意林(2007年16期)2007-10-22