
基于观测器模型的海上风电机群干扰抑制系统设计
2022-05-24 11:43:54徐孝峰刘劲尧林圣辉夏曙光
电子设计工程 2022年10期
徐孝峰,刘劲尧,林圣辉,夏曙光
(1.华电(福建)风电有限公司,福建 福州 350000;2.中国华电集团有限公司福建分公司,福建 福州 350000)
海上风电机群在海上正常运行时,会受到海上 风力、压力等较多外界因素的影响,并且海上风电机群需要直接驱动负载,在驱动负载以及受到较多外界因素影响时,各种干扰也会作用于海上风电机群,所以海上风电机群干扰抑制系统需要较好的抗干扰性能,海上风电机群的抗干扰性能会直接影响海上风电机群的带负载能力、旋转的精度以及风电机群的运行速度[1-2]。
为了提高海上风电机群的抗干扰能力,国内的许多专家、学者作过很多细致的研究,认为采用干扰观测器模型可以有效消除海上风电机群受到的电磁设备等干扰,但除了电磁设备干扰之外,海上风电机群还会受到海风风力、压力、船上电子设备的无线电干扰等。海上风电机群在受到不确定干扰时,干扰观测器消除海上风电机群受到的干扰时不能达到对各种干扰的完全补偿,并且海上风电机群干扰的程度较高,在调试、控制过程中存在一定的难度[3-5]。基于以上出现的问题,文中设计了基于观测器模型的海上风电机群干扰抑制系统,构建海上风电机群干扰模型,该模型能够有效消除海上风力、压力、无线电设备等的干扰,从而可以实现对海上风电机群具体位置的准确跟踪、控制。
1 基于观测器模型的海上风电机群干扰抑制系统硬件设计
基于观测器模型的海上风电机群干扰抑制系统硬件结构如图1 所示。
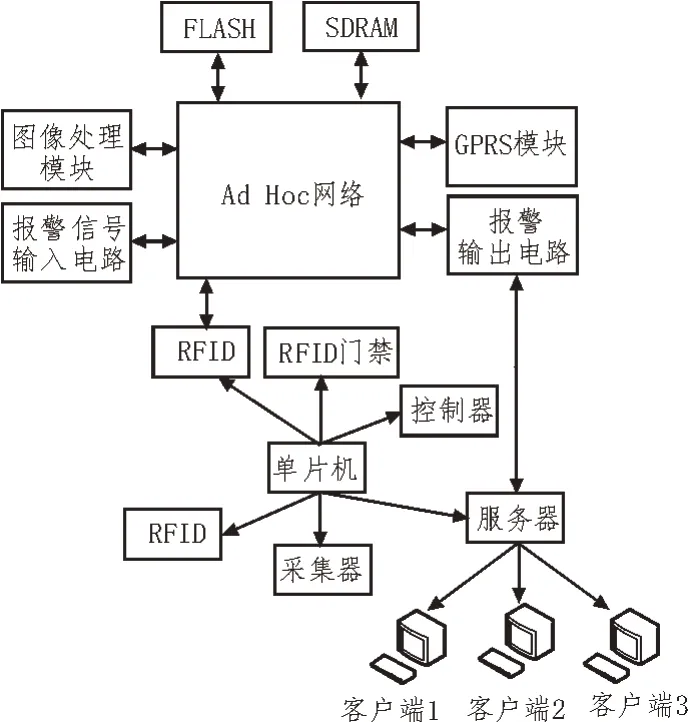
图1 海上风电机群干扰抑制系统硬件结构
1.1 单片机设计
基于观测器模型的海上风电机群干扰抑制系统的单片机选用三星公司生产的最新SD64A21,该单片机内部设有8 kB 的高速转换存储器,该存储器能够简单、快速存储由采集器采集的信号数据,并且在编写程序时使用方便,对高速转换存储器不需要进行外部编程,简化了硬件系统的结构,并且该单片机功耗较低,具有6 通道10 位A/D 转换器[6-8]。
单片机的外围电路需要与内部设置的光电耦合器相连,外围电路选用SIMENS 公司最新推出的SM4143 型驱动芯片,该款芯片可以有效驱动光电耦合器,外围电路的供电电压控制在8~12 V,电阻的最大值为6 Ω,外围电路的工作电流控制在4~6 A,外围电路的驱动芯片可为光电耦合器提供工作电流,耐压最大值为30 V。外围电路的驱动芯片内部设有一个集电极和一个二极管,所以在单片机内部设置光电耦合器时不需要在光电耦合器线圈上串联集电极与二极管[9-10]。
1.2 电源电路设计
基于观测器模型的海上风电机群干扰抑制系统硬件中的电源电路供电电压为12 V,电源电压具有范围宽、稳定性好、准确度高等优点,电源电路的输入电压为3.3 V,电压经过硬件系统芯片时可调节单片机的内部稳压管,通过内部稳压管的电压为1.8 V,电流为1.2 A,电源电路通过电阻分压可以产生2 V、3 V、4 V、5 V 共4 路信号,方便A/D 转换器进行采样。硬件中的单片机需要6 V供电,在电源电路中可添加滤波电容,这样可有效减小电流[11-12]。电源电路如图2所示。

图2 电源电路
电源电路的集成芯片动态范围较大,最高能够达到50 dB,最大的线性失真在0.1%左右。为了使集成电路芯片具有较好的线性失真,可将电源的工作频率调整到0.1,这时的电源转换精度较高,内部的稳压管数字分辨率最高达10 位,电源电路不需要再外接电路,必要时接入较少的器件就可以正常工作[13-14]。
1.3 采集器设计
海上风电机群干扰抑制系统硬件设备中的采集器芯片选用ST 公司最新推出的ST6396 采集芯片,该款采集芯片为10 位高速芯片,具有低功耗、准确度高的特点。数字分辨采用逼近式频率调节器,供电电压为1.8~3.3 V,采样频率最高可达2.5 MSPS,能够有效保障采集回速变信号以及缓变信号。采集器的输入信号电压控制在1~8 V,设计采集器时需要使用运算放大器将电路放大,输入信号的电压变成1.8 V,控制开关经过调整后,在采集器的稳压管中输入A/D 转换器,2 路输入信号使用一个3 V 的稳压管,将转换器中的低电平信号控制在4 V 以内,这样可以提高采集器的调压作用[15]。采集器结构如图3 所示。

图3 采集器结构
根据图3 可知,海上风电机群干扰抑制系统需要采集器同时多通道采集数字信号,根据输入信号稳定性高的特点,选用3 路模拟开关对采集器的多通道进行实时切换,3 路模拟开关的开关速度较快,可以实现采集器完成多通道不同路信号的采集测试。单路采样信号的采样频率最低为20 kHz,这样在每次采集完速变信号后,可以继续采集缓变输入信号,速变信号的采样频率大于50 kHz,缓变输入信号的单路采样频率为25 kHz。
1.4 控制器设计
文中设计的控制器选用SD公司生产的SDM8201作为无线传输的核心,该款控制器单片为6 位且功耗较低,自身带有16 片高速数字程序存储器,控制器的时钟频率最高可达120 MHz,全动态的工作方式使控制器较容易完成串、并行的转换。控制器具有6个中断优先级以及8个频率中断源、8位A/D 串行端口以及2个8位定时时钟。定位时钟如图4所示。

图4 定位时钟
除此之外,在控制器的内部带有单双工降低型的端口,端口可进行信号数据的甄别检测和自动识别定时器位置,控制器的外围电路采用电源控制方式,对定时器的停止以及恢复可以较快地进行,同时具有时钟空闲模式和定时器的掉电模式,控制器的外部控制设备设有外部中断唤醒模式,该款控制器的以上设计可以实现海上风电机群干扰抑制系统对控制器的无线传输需求[16]。
2 基于观测器模型的海上风电机群干扰抑制系统软件设计
为了使海上风电机群能够准确定位在某一位置,在某一时刻,速度和加速度需要保持一致,文中引入了观测器模型,该观测器模型可以将海上风电机群受到的干扰进行分类,对影响速度的干扰可通过加速度进行观测,并且使干扰的受力保持平衡。观测器模型中与加速度呈线性相关的主要是粘滞摩擦力,所以针对海上风电机群的干扰因素,设计了一种加速度模型对干扰因素进行补偿观测,该观测器模型不涉及对干扰因素的方式控制,因此观测器模型设置得较为简单,比较容易实现,对海上风电机群的抗干扰可以达到较高的控制效果,对风电机群受到外界压力影响的加速度可以很好地进行控制,对其可实现准确、精密的定位。
基于观测器模型的海上风电机群干扰抑制系统软件流程如图5 所示。

图5 海上风电机群干扰抑制系统软件流程
首先,上电启动,对系统进行初始化设置。系统软件使用C 语言进行编写、调试,上电启动后,对传感器参数进行配置,编辑滤波参数以监控显示界面的实时状态,通过连接数据对频谱进行分析,对传感器的采样时间、采样率以及标准数据参数进行初始化设置,实现干扰抑制系统的检测、通信。
然后,命名海上风电机群的文件并保存,对传输信号数据进行滤波处理。系统编辑的文件通过C 语言程序进行命名,命名完成后将其保存在干扰抑制系统的内部存储器中,配置海上风电机群的报警阈值,根据海上阈值的结果,判断报警信息的分类属性,报警结果确定后,由传感器发出报警信息,对传感器传输的数据进行滤波处理。
最后,对海上风电机群受到的干扰进行绘制并实时显示出来,记录导入干扰抑制系统的数据并进行频谱分析,对软件系统的报警设备进行振动检测,并与报警设备中的检测数据进行交互处理,处理完成后加载阈值数据,将数据写入文件中并进行保存,完成与海上风电机群设备的通信。
3 实验研究
文中设计了基于观测器模型的海上风电机群干扰抑制系统,采用了观测器模型,节约了系统程序的编写时间,提高海上风电机群干扰抑制系统稳定性,即使受到海上风力、压力等多种外界因素的干扰,系统的稳定性也没有受到影响。为检测文中设计系统的有效性,与传统系统进行实验对比,得到的干扰抑制效果如图6 所示。
观察图6 可知,文中提出的系统抗干扰能力更强,该系统硬件方面设计了电源电路、单片机、采集器以及控制器,硬件器件的设计使海上风电机群干扰抑制系统能够获得较高的干扰抑制性能,传统的干扰抑制系统存在较为明显的超调,而文中设计的干扰抑制系统消除了外界较多种因素的干扰,使系统避免了积分环节,实现对海上风电机的准确定位与实时跟踪。
采用设计的干扰抑制系统,在添加超额负载的情况下,海上风电机群的抗干扰性能没有受到太大影响,提高了系统的可靠性及系统对各种干扰因素的抗干扰能力,对海上风电机群位置控制时无线电设备的干扰可以得到很好的抑制效果,进而提高了系统的稳定性和准确度,降低了维护海上风电机的成本,减少了信息在传递过程中产生的失真,使基于观测器模型的海上风电机群干扰抑制系统更具有实用性,对海上风电机群受到的各种干扰具有较好的控制效果,有效抑制了海上风力、压力以及其他外界因素对风电机群产生的干扰,极大地提高了海上风电机群干扰抑制系统的安全性、稳定性和可靠性,达到了较为明显的控制效果。
4 结束语
针对海上风电机群受到较多干扰的问题,设计了基于观测器模型的海上风电机群干扰抑制系统,采用了观测器模型,对海上风电机群在海上正常运行过程中的电磁设备干扰进行了系统的建模,并以此对电磁设备以及无线电设备产生的干扰进行了有效的消除,达到了较好的抗干扰效果,既可以获得较明显的控制效果,又提高了基于观测器模型的海上风电机群干扰抑制系统的稳定性和可靠性,使海上风电机群具有较高的准确度,提高了系统的安全性和灵活性,降低了系统运行的成本,使设计的基于观测器模型的海上风电机群干扰抑制系统具有更高的应用价值。
猜你喜欢
现代仪器与医疗(2021年1期)2021-06-09 05:53:54
智富时代(2018年7期)2018-09-03 03:47:26
科技资讯(2017年18期)2017-07-19 09:58:51
计算机测量与控制(2017年6期)2017-07-01 16:24:05
计算机测量与控制(2017年6期)2017-07-01 16:24:04
现代计算机(2016年11期)2016-02-28 18:35:14
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
