含谐波抑制环节的虚拟同步机控制系统仿真研究
2022-05-24 02:01:20丁惜瀛宫晶赢李晓东
控制与信息技术 2022年2期
程 锟,丁惜瀛,宫晶赢,韩 妍,李晓东
(沈阳工业大学,辽宁 沈阳 110870)
0 引言
近年来,光伏逆变器、风机等设备大量投入使用,大量分布式电源被接入电网,对电网的电压频率以及电能质量造成影响;而且在电网中有大量的非线性负载,会使谐波问题更加突出[1]。传统并网策略带来的功率冲击问题可以用虚拟同步机控制技术来解决[2]。基于虚拟同步发电机技术的微电网控制策略,其增加了分布式微源并网过程中微电网的惯性环节,可以抑制电压突变,增强电网的稳定性[3-4]。然而,虚拟同步机控制通过逆变器并入交流微电网运行过程中,由于存在虚拟同步机的惯性环节和功率波动问题,会使谐波问题更加严重[5]。
目前,电力系统中谐波治理的主要方式是在电能传输路径中添加谐波补偿装置[6]。文献[7]在虚拟同步机技术基础上,在电压环加入多重谐振控制器来抑制电压谐波。文献[8]为抑制虚拟同步发电机产生的谐波,在虚拟同步机控制策略基础上,提出在滤波电容器上串并联阻尼电阻器的谐波抑制策略。文献[9]提出一种模糊PI和重复控制的复合策略,从而达到抑制谐波的目的。文献[10]提出一种提取三相电流谐波信息并前馈至调制波以改善电流质量的方法。文献[11]提出一种基于虚拟谐波电阻的同步定频电流控制法,其通过引入虚拟谐波电阻来抑制电压畸变。文献[12]在PI控制的基础上加装并联PR控制器来对低频谐波进行主动抑制。文献[13]提出一种基于陷波器的电网电压前馈控制策略来抑制谐波。文献[14]提出一种分频下垂控制逆变器的构想。以上几种消除谐波的方法虽然有效,但是实现过程中需要复杂的算法或者引进复杂的控制器,从搭建模型到运行仿真都耗费运行时间。
本文提出一种谐波抑制方案,其将虚拟同步机技术和下垂控制策略相结合,通过带通滤波器将基波和将要消除的谐波分别提取出来,基波电压电流采用虚拟同步机控制方法,谐波电压和电流利用分频下垂控制方法,达到消除谐波的目的。这样,功率冲击的问题用虚拟同步机控制策略来解决,谐波问题用分频下垂控制策略解决,不需要用复杂的算法,缩短了运行周期,使系统运行快速、高效。
1 逆变器并网控制策略
逆变器并网结构如图1所示。图中,uabc和iabc分别为逆变器输出的电压和电流;uout和iout分别为交流母线上的电压和电流;Lf和Cf为滤波电感和滤波电容。

图1 并网逆变器系统结构Fig.1 Grid-connected inverter system structure
1.1 传统控制策略
传统的逆变器控制策略如下:采集逆变器输出电压和电流信号,信号经过功率计算模块,得到有功功率Pout和无功功率Qout;通过外环控制器计算出电压给定,然后经内环的电压电流双闭环控制,将最终的PWM波形输给逆变器,得到输出电压。
传统的并网逆变器控制策略有P/Q控制、V/f控制和下垂控制。以下垂控制为例,微电网系统的负载一旦发生变化,功率波形的变化极其迅速,这是因为逆变器由电力电子器件构成,微源或者负载若发生变化,就会导致整个系统的快速波动。由于分布式电源并网有很大的波动性,功率突增或突减会造成电网压力过大,而常见的这几种控制策略并不适用。为此,虚拟同步机控制策略被用于代替传统的下垂控制方法。
1.2 虚拟同步机控制策略
虚拟同步机控制是模拟电力系统中一种常见的同步发电机输出特性控制方法。同步发电机之所以能够稳定运行,主要倚靠两个系统:转子的调速系统和励磁调节系统。
转子调速系统用于控制同步发电机的有功输出,主要包括转子的自运动方程和调速器两个部分。转子运动方程如下:

式中:Tm和Te——分别为电机的机械转矩和电磁转矩;J——转子的转动惯量;ωm——转子机械角速度。
同步发电机另一个控制系统便是励磁调节系统,发电机输出的无功功率是由其励磁电压控制。励磁调节系统中最核心的部件是励磁调节器,其基本控制方程如下:

式中:Q0——无功功率给定;U0——给定参考电压;KU——无功功率-电压调节系数。
从式(1)和式(2)可以看出,有功功率取决于相角差,无功功率取决于逆变器的输出电压,据此得到虚拟同步机的控制结构(图2)。

图2 虚拟同步机控制结构Fig.2 Control structure of virtual synchronization machine
采用虚拟同步机控制技术后,系统增加了惯性环节,可以解决微电网系统因电压电流瞬变导致的非线性负载谐波问题。本文提出一种基于虚拟同步机控制的分频下垂控制谐波抑制策略。
2 基于虚拟同步机控制的分频下垂谐波抑制策略
将分布式电源和逆变器用一个电压源和一个阻抗表示,抽取第n次谐波电路进行分析,当其向电流源传递功率时,数学模型如图3所示[15]。图中,vrn为电源电压,Z0(jnω*)是输出阻抗,von和in表示其他负载的电压值和电流值。

图3 n次谐波频率的电路Fig.3 Circuit with nthharmonic frequency
电压型逆变器不产生谐波的理想条件是所有谐波电压为零。设von(n≠1)无限接近0,则整个负载只剩下电流源in,将谐波电路进行等效,如图4所示。
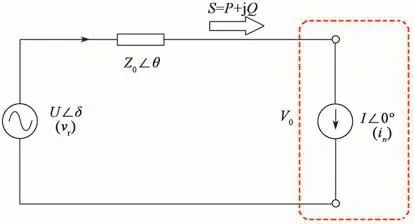
图4 电压源向电流源传递能量图Fig.4 Energy transfer diagram from voltage source to current source
当电压源向电流源传递能量时,其端口电压为整理后得到


逆变器输出有功功率和无功功率分别为

根据电压源向电流源的功率传输特性,下垂控制公式如下:

式中:U0——额定电压;ω0——额定角频率;Qn——n次谐波频率下所对应的无功功率;Pn——n次谐波频率下所对应的有功功率;mn——n次谐波下垂控制的P-f下垂系数;nn——n次谐波下垂控制的Q-U下垂系数;ωn——谐波频率;Un——与谐波频率和谐波电压相关的指令谐波电压值。
下垂系数是关于有功功率和频率之间关系的系数,其不会随着外界条件的改变而改变。利用这个特点,本文提出了改善电压总谐波畸变率(total harmonic distortion,THD)的谐波下垂控制器。
产生的谐波功率等效于逆变器向电流源传输功率,若要使逆变器输出中没有谐波分量,则需要将图4中的V0控制为0,即传输到电流源的谐波为零。在此基础上设计出谐波下垂控制器,得到n次谐波下垂控制公式:

图5示出下垂控制原理图。由于谐波电压值被设置为0,因此通过谐波下垂控制就可以消除谐波电压。

图5 第n次谐波的下垂控制图Fig.5 Droop control chart of the nthharmonic
用带通滤波器将系统中的电压、电流分成基波和谐波两部分。其中,基波部分采用虚拟同步机控制,经过功率分配后,系统稳定在额定工作电压、频率点运行;谐波部分采用谐波下垂控制策略,可消除微电网系统中存在的特定次谐波,以此来提升系统的电能质量。基于虚拟同步机控制的分频下垂谐波抑制策略的整体结构如图6所示。

图6 基于虚拟同步机控制的分频下垂谐波抑制策略结构Fig.6 Structure of virtual synchronous machine control system with crossover droop harmonic suppression
3 仿真验证与分析
基于Matlab/Simulink仿真工具建立了虚拟同步机控制仿真模型以及谐波下垂控制模型,模型中主要包括分布式电源、逆变器、滤波器、线路阻抗、负载以及电网端。利用虚拟同步机模型与传统下垂控制模型进行仿真比较,并在此基础上对谐波抑制有效性进行仿真研究。测试按照标准GB/T14549-1993《电能质量-供用电网谐波》要求进行。
3.1 虚拟同步机控制策略仿真分析
以下对虚拟同步机控制策略的先进性进行验证。将一个分布式电源通过逆变器接入电网端,分别采用虚拟同步机控制和下垂控制策略,在第5 s时刻将负载功率由3 kW提升到8 kW,逆变器输出功率的变化如图7所示。同样,离网工况下在第5s时刻,将负载功率从3 kW提升到8 kW,逆变器输出频率的变化如图8所示。
由图7和图8可以看出,采用下垂控制策略时,在第5s时刻,负载功率从3 kW突然增加到8 kW,频率从50.2 Hz直接升至52 Hz;采用虚拟同步机控制策略时,逆变器输出功率从3 kW振荡增加到8 kW,并且频率从50.2 Hz振荡缓降到50 Hz,相比下垂控制中功率和频率的突然变化,虚拟同步机控制的功率和频率变换过程中有惯性环节。针对分布式电源并网的实时性以及不确定性,采用虚拟同步机控制技术可以有效减缓分布式电源并网时对电网的冲击。

图7 逆变器并网控制功率波形Fig.7 Power curves of inverter with different grid-connected control
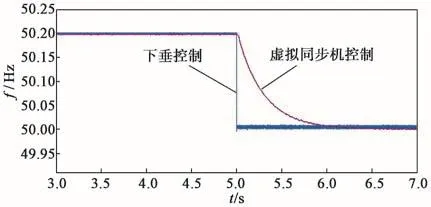
图8 逆变器离网控制频率图Fig.8 Frequency curves of inverter with different off-grid control
3.2 谐波下垂控制策略仿真分析
基于上述虚拟同步机控制,在逆变器的控制部分同时施加3次谐波和5次谐波下垂控制。本文以抑制谐波为目的,通过与单独虚拟同步机控制的对比,验证谐波下垂控制的有效性。
仿真模型中,滤波电感为0.6 mH,滤波电阻为0.01Ω,滤波电容为0.000 15 F;线路电阻为0.128Ω,线路电感为0.05 mH。基波控制器与谐波控制器主要参数如表1所示。

表1 主要模块参数Tab.1 Main module parameters
将一个分布式电源通过逆变器接入电网端,首先单独采用虚拟同步机控制策略,运行时间设置为10 s。通过仿真运行,得到电压、电流的波形以及FFT分析图,如图9和图10所示。接着,采用虚拟同步机控制技术与谐波下垂控制相结合的方法,运行时间设置为10 s,仿真运行得到的电压、电流波形以及FFT分析图如图11和图12所示。由图9~图12可知,加入谐波下垂控制之后,电压、电流波形由原先的畸变波形变为正弦波形,电压的THD值从31.36%下降到3.91%,电流的THD值从50.24%下降到4.04%。可见,谐波下垂控制策略对系统的运行质量有很大的改善。

图9 未加谐波下垂电压波形以及FFT分析Fig.9 Analysis of droop voltage waveform and FFT without harmonic

图10 未加谐波下垂电流波形以及FFT分析Fig.10 Droop current waveform and FFT analysis in the condition of no adding harmonic

图11 加入谐波下垂电压波形以及FFT分析Fig.11 Droop voltage waveform and FFT analysis in the condition of adding harmonic

图12 加入谐波下垂电流波形以及FFT分析Fig.12 Droop current waveform and FFT analysis in the condition of adding harmonic
3.3 系统稳定性分析
为验证下垂系数的变化对系统稳定性的影响,在系统中加入稳定性分析。根据图5,可以在仿真软件Matlab/Simulink中得到P-f控制和Q-U控制的闭环传递函数,谐波下垂控制在下垂系数变化情况下的根轨迹如图13和图14所示。
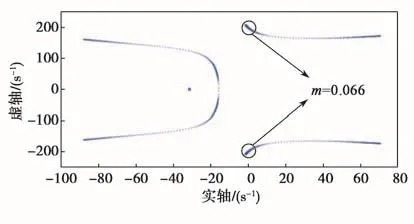
图13 P-f下垂系数变化的根轨迹图Fig.13 Root locus diagram as P-f droop coefficient changes

图14 Q-U下垂系数变化的根轨迹图Fig.14 Root locus diagram as Q-U droop coefficient changes
由图13可以看出,系统中存在2个靠近虚轴的特征根。随着参数m的增加,2个特征根逐渐向s域的右半平面移动,此时系统不稳定,下垂系数取0.066,即最靠近虚轴的点。同样,由图14可以看出,系统也存在2个靠近虚轴的特征根,下垂系数中最靠近虚轴的点是0.65,所以取下垂系数为0.65。
4 结语
针对分布式电源以及非线性负载并网过程中产生的谐波问题,本文提出一种虚拟同步机技术和分频下垂控制相结合的控制方法。通过搭建模型与仿真运行实验,得到以下结论:
(1)相比下垂控制,将并网逆变器控制策略改为虚拟同步机控制后,并网过程没有功率突变现象,提高了电网系统运行的安全性。
(2)在虚拟同步机控制基础上加入谐波下垂控制策略,采用分频下垂控制的方法可以达到抑制谐波的目的。
(3)下垂系数的变化会对系统稳定性造成影响,选取到满足系统稳定性要求的下垂系数最大值,可以保证系统稳定运行。
本文所提虚拟同步机技术和分频下垂控制相结合的控制方法也可以应用到电动汽车领域。由于电动汽车并网具有随机性,因此下一步将尝试解决这种不确定性并网带来的谐波问题。
猜你喜欢
电气技术(2022年10期)2022-10-25 00:45:48
大电机技术(2022年1期)2022-03-16 06:40:08
能源工程(2020年6期)2021-01-26 00:55:22
防爆电机(2020年4期)2020-12-14 03:11:02
山东冶金(2019年3期)2019-07-10 00:54:04
成都信息工程大学学报(2018年3期)2018-08-29 01:08:40
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
电源技术(2015年11期)2015-08-22 08:50:58