
一种综合化通信导航识别系统评估方法
2022-05-24 03:12高龙超
测控技术 2022年5期
高龙超
(中国西南电子技术研究所,四川 成都 610036)
电子信息技术的日益发展促进了航空电子技术的不断进步,机载平台集成了越来越多功能各异的传感器,这些传感器能够大幅提升平台作战效能。其中,无线电通信、导航、识别设备为飞机的飞行安全以及任务执行提供了重要支撑。机载平台配备的通信、导航、识别设备样式较多,互为补充,如通信设备需要提供视距通信和超视距通信,导航设备需要提供起飞降落阶段的导航能力以及巡航阶段的导航能力。而机载平台由于设备装机位置和空间有限,无法为功能各异的通信、导航、识别设备提供充足的装机空间,隐身飞机的这一矛盾更加突出[1]。为了解决这一问题,射频综合的概念被提了出来[2]。美国空军的“宝石柱”计划采用综合射频技术,优化系统架构设计,使模块设计标准化、通用化,并且保持系统的开发性和可扩展性[3-5]。这一设计理念使得综合射频系统与未综合的系统相比,成本下降了1/2,体积下降了1/2,可靠性提高了2倍,功耗下降了1/3。
将射频综合的设计理念用于通信、导航、识别设备的综合化设计,所设计的综合化通信导航识别系统在体积质量功耗成本方面有显著优势。综合化通信导航识别系统除了上述优点之外,还有其他方面的优势。首先,综合化通信导航识别系统能够支持功能的重构,由于其采用通用化的模块,当某一通用模块故障导致某一功能失效后,系统根据优先级,可将其他正常的模块分配给该功能使用,从而保证高优先级的功能正常工作。其次,综合化通信导航识别系统维护方便,其使用外场可更换模块,当模块故障后,可直接更换故障模块,无需将整个综合化通信导航识别系统拆下进行维修。当系统的各功能需要软件升级或者下载数据时,只需要一个维护口,一名保障人员就可实现对所有功能的软件升级和数据下载,而独立设备则分别需要预留维护口,且需要多名保障人员分别维护。最后,综合化通信导航识别系统通过孔径综合以及模块标准化设计,减少了天线孔径数,且模块种类也极大地减少[6-7],缩短了研发周期,便于系统的技术状态管理。
综合化通信导航识别系统没有严格的设计规范,文献[8]分析了综合化通信导航识别系统的关键技术,给出了设计的指导原则,如综合化、通用化、标准化、可扩展性,并不是具体的设计标准与规范。在方案设计阶段,研究人员往往会从不同侧重点预先设计多个系统方案,经过比较后从中选择最优的一个方案。基于此,需要一种有效方法,以对综合化通信导航识别系统方案的性能进行评估。对综合化通信导航识别系统的性能评估需要从多个维度展开,如系统的体积、质量、可靠性等方面。综合化通信导航识别系统有多个属性,而各个属性的权重难以直接给出,需要选择合适的方法对综合化通信导航识别系统进行综合评估,才能得到精确客观的评估结果,从而指导实际工程中的综合化通信导航识别系统的方案决策。
文献[9]使用层次分析法(Aanalytic Hierardry Process,AHP)对综合射频系统的架构进行评估,对3种综合射频系统架构进行比较,并根据评估结果选择出最优的系统架构,其对综合射频系统架构的评估与本文面临的对综合化通信导航识别系统的评估问题类似。文献[9]中,最终的评估结果为归一化结果,归一化结果越大说明方案最优,但根据评估结果无法精确得知方案的优劣程度,即只能对3种架构的优劣进行排序,做到定性评估,无法进行定量评估,这对于综合化通信导航识别系统的评估是不够的,需要进一步寻找能够实现精确评估的方法。
笔者首先建立综合化通信导航识别系统指标评估体系,提出从系统指标、综合指标、重构能力、“五性”指标以及传感器能力5个方面对综合化通信导航识别系统进行评估;然后对现有的多属性评估方法进行对比,根据综合化通信导航识别系统的特点选择一种基于模糊评判的改进层次分析法作为评估方法。详细介绍了改进层次分析法的步骤,通过具体实例说明了该方法的有效性。
1 指标评估体系
1.1 系统指标
系统指标包括体积、质量和功耗3个方面。这3个方面与平台的特性密切相关,是机载平台对综合化通信导航识别系统的直接约束条件。机载平台空间狭小,小型化设计是永恒的主题。设备体积达不到飞机平台的约束条件,设备根本无法装机。小型化设计除了能够满足设备装机之外,也使得设备的拆卸和维护变得方便,设备与天线之间装机电缆的铺设也变得更加容易,用系统的体积反映小型化程度。设备的质量是飞机质量的一部分,飞机起飞所能承载的总质量是一定的,轻型设备使得飞机可装载更多的其他载荷。对综合化通信导航识别系统而言,质量主要来源于3部分:机架(含嵌入机架的模块)、天线(含天线接口部分)以及装机线缆。功耗是需要关注的另一个关键的系统指标,降低电子设备的功耗能够减少对飞机上资源的消耗。由于设备的电是由飞机提供的,因此设备的功耗不能超出飞机所能提供的允许范围,否则会对飞机的供电设计产生影响。综合化通信导航识别系统的功耗包括机架、天线接口部分和有源天线的功耗。
1.2 综合指标
根据综合化系统的特点和设计理念,将孔径数目、模块种类以及模块数量作为反映综合化通信导航识别系统综合化程度的3个指标。孔径数目能够反映综合化通信导航识别系统孔径综合的程度。通过孔径综合,减少孔径数目,有利于飞机的隐身,也有利于全机电磁兼容。而减少模块种类数和模块数目对综合化通信导航识别系统的技术状态管理有益,极大地减轻了在设备全生命周期过程中研发设计人员的负担,同时减少了系统所需要提供的模块备件数目。
1.3 重构能力
与未进行综合设计的系统相比,综合化通信导航识别系统的一个显著特点是支持功能重构。用可支持重构的功能数、平均可重构次数和重构响应时间反映系统重构能力。综合化通信导航识别系统需要支持多个重要功能的重构,如平台的话音通信功能、航管应答功能等,支持重构的功能数越多,系统的重构能力越强。同时,有时还要求系统支持多次重构,多次重构指的是在第一次重构发生之后,又发生了模块故障,系统还可继续支持重构,用平均可重构次数反映。最后要求重构要无缝衔接,若重构速度慢,会影响用户的使用。用重构响应时间表征重构的快慢。
1.4 “五性”指标
选取“五性”指标中的测试性、维修性以及可靠性评估综合化通信导航识别系统的性能。其中,测试性指标中选择故障检测率,维修性指标选择平均维修时间,可靠性指标选择平均无故障时间。故障检测率越高、平均维修时间越短、平均无故障时间越长,系统性能越优。综合化通信导航识别系统使用标准模块、通用模块,只需加载一种波形即可对多个功能进行检测,且可在重构模式下,用多种波形实现对一个模块的多次检测,故障检测率高。当检测出模块故障后,直接更换模块即可达到对系统进行维修的目的,维修时间相对未综合化的系统有明显缩短。综合化通信导航识别系统简化了互联设计和软硬件设计,极大地降低了系统复杂性,为提高系统可靠性奠定了基础。同时,综合化通信导航识别系统对关键节点进行了冗余设计,系统容错率高,提高了系统的可靠性。
1.5 传感器能力
选取语音清晰度、导航精度、识别概率作为综合化导航识别系统的传感器能力评估指标。综合化通信导航识别系统为飞机提供通信服务,可供飞行员与地面塔台进行语音通信,同时也可提供与其他飞机的语音通信,其中,话音清晰度是衡量语音服务质量的重要指标。无线电导航是飞机正常执行任务必不可少的传感器设备,能够提供飞机相对地面台的距离和角度,在飞机起飞、降落时为飞行员提供必要的距离和角度信息。无线电导航设备的精度越高,越能够为飞行员提供优质的导航服务。识别设备在作战时可对目标敌我属性进行判定,雷达等传感器探测到目标后,需要敌我识别设备判定该目标是友方还是敌方,若识别错误,可能会造成误伤。因此,设备的识别概率越高,作战时的误伤概率就越低。
2 评估方法选择
综合化通信导航识别系统的评估是典型的多属性权重决策问题。
文献[10]和文献[11]系统地介绍了国内外武器装备的评估方法。文献[10]将评估方法分为3种:基于作战能力的评估方法、基于作战效能的评估方法和基于体系结构的评估方法。文献[11]则将评估方法归纳为专家调查法、解析法、层次分析法等,并对比了各种方法的优缺点。基于文献[10]和文献[11]中关于评估方法的详细介绍,结合综合化通信导航识别系统的特点,经过分析,层次分析法和多属性决策法是较为适合综合化通信导航识别系统的评估方法。文献[12]详细介绍了层次分析法和多属性决策法。多属性决策法首先获取决策矩阵,使用信息熵法根据决策矩阵得到各属性的权值,再根据TOPSIS法[13-15]将决策矩阵和权值进行综合得到评估结果。层次分析法则需要构造成对比较矩阵,计算成对比较矩阵的特征向量,取特征向量作为各属性的权值。多属性决策法计算的属性权值依赖于各方案属性的取值,而层次分析法计算的属性权值与各方案属性的取值无关。当某一方案加入或者退出时,多属性决策法计算的属性权值会发生变化,而层次分析法计算的属性权值不会发生变化。对于综合化通信导航识别系统,希望选择的系统属性确定后,属性权值能相对固定,不希望某一方案加入或退出时,属性的权值发生变化。因此,层次分析法比较适用于综合化通信导航识别系统的评估。
然而从评估结果看,层次分析法和多属性决策法尽管能得到对各个方案的评估结果,但评估结果为相对值,即只知道方案的优劣排序,不能精确地知道各个方案的优劣程度。文献[16]和文献[17]提出使用灰度函数对层次分析法进行改进,文献[18]和文献[19]基于模糊评判对层次分析法进行修正,灰度函数和模糊评判在数学领域都是对不确定性的描述。这些文献将专家打分和模糊理论相结合,得到隶属度矩阵,用隶属度矩阵修正层次分析法的权值,最终得到评估结果。但文献[16]和文献[17]的隶属度矩阵与灰度函数的选择有关,文献[18]和文献[19]并未给出获取隶属度矩阵的过程。笔者提出使用直方图法统计专家打分,得到隶属度矩阵,将隶属度矩阵与层次分析法获取的权值进行综合,得到每个方案的评估结果,最终能得到与文献[16]~文献[19]类似的结果,既能得到各个方案的优劣排序,也能判断各个方案的优劣程度。
3 改进的层次分析法
3.1 层次分析法
层次分析法是一种定量与定性相结合、自顶向下分层的分析评估手段,由Saaty于20世纪70年代提出。层次分析法适用于影响因子较多且较难量化的复杂系统的评估问题,使用层次分析法可以获得各影响因子的权重。
使用层次分析法步骤如下。
① 分析梳理系统所包含的关键因子,根据内在逻辑关系将这些因素用分层的方式表示,用层次结构图展现。综合化通信导航识别系统性能指标评估体系的层次结构如图 1所示。

图1 层次结构图
② 对于处于同一层的因子,构造成对比较矩阵,矩阵的每个元素为两两因子重要性比值。不妨假设有n个因子,分别为P1,P2,…,Pn,第i个因子和第j个因子(i≠j)重要性比值为aij,则成对比较矩阵为A=(aij)nn。显然,aii=1;i=1,2,…,n;aij=1/aji。对图 1的层次结构图,需要构造5个成对比较矩阵。其中,针对第1层构造1个成对比较矩阵,针对第2层构造4个成对比较矩阵。需要说明的是,层次分析法容许不一致性的存在,但这种不一致性需要控制在一定范围内。
③ 对成对比较矩阵进行一致性检验。对矩阵A进行特征值分解,设λ为矩阵A的最大特征值,ω为对应的归一化特征向量。定义一致性指标CI为
(1)
定义随机一致性指标为RI,RI由n决定,n为影响因子数,RI与n的关系如表1所示。
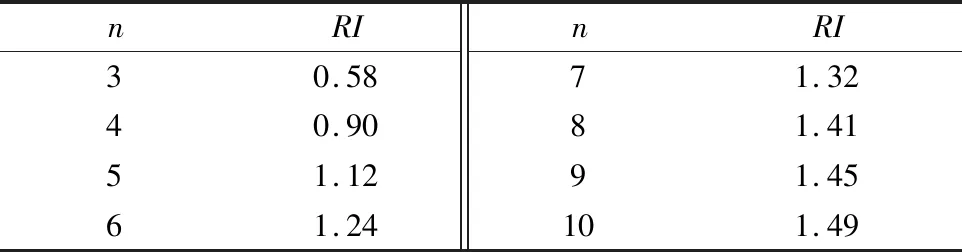
表1 随机一致性表
进一步定义一致性比率CR为
(2)
式中:若CR<0.1,则认为通过一致性检验,可以用矩阵A最大特征值对应的特征向量作为权值向量;否则,需要对矩阵A进行修正,直至通过一致性检验。

(3)
式中:ω(i)为ω的第i个元素;ω为图 1中第1层的权值向量。
3.2 基于直方图法的模糊评判
模糊评判是指对各影响因子以某个预先选定的评语集为参考,基于最大隶属度原则进行定量评判。模糊评判包含3个要素:
① 评判因子集U={u1,u2,…,un}。其中,ui为评判因子。


3.3 综合计算
(4)


E=ωD
(5)
式中:E为1×m矩阵;ω为1×n矩阵,为图 1中第1层的权值向量。对应于图 1,n=5,m为评价等级数,E为被评价系统基于评判集V={v1,v2,…,vm}的最终评价结果。
4 实例计算分析
4.1 权值计算
对图 1第1层的各个因子进行两两比较,结合Saaty的比较尺度建议[6],得到第1层级的成对比较矩阵,如式(6)所示:
(6)
式中:A的各个元素代表相应因子重要性的比值。
对矩阵A进行特征值分解,最大特征值对应的特征向量w=[0.3689 0.2063 0.1093 0.1093 0.2063]T,一致性比率CR=0.0037<0.1,通过一致性检验。
对图 1中第2层的各个子层的每个因子进行两两比较,结合Saaty的比较尺度建议,得到系统指标对应的成对比较矩阵A1,为式(7)中矩阵F的1~3列;综合指标对应的成对比较矩阵A2,为式(7)中矩阵F的4~6列;重构能力对应的成对比较矩阵A3,为式(7)中矩阵F的7~9列;“五性”指标对应的成对比较矩阵A4,为式(7)中矩阵F的10~12列。传感器能力指标对应的成对比较矩阵A5,为式(7)中矩阵F的13~15列,矩阵F的各个元素代表相应因子重要性的比值。

(7)
对A1进行特征值分解,得到最大的特征值λ1=3.01,特征向量w1=[0.5396 0.2970 0.1634]T,一致性比率CR=0.0079<0.1,通过一致性检验。
对A2进行特征值分解,得到最大的特征值λ2=3.02,特征向量w2=[0.5499 0.2402 0.2098]T,一致性比率CR=0.0158<0.1,通过一致性检验。
对A3进行特征值分解,得到最大的特征值λ3=3.02,特征向量w3=[0.5584 0.1220 0.3196]T,一致性比率CR=0.0158<0.1,通过一致性检验。
对A4进行特征值分解,得到最大的特征值λ4=3.01,特征向量w4=[0.4579 0.1260 0.4161]T,一致性比率CR=0.0079<0.1,通过一致性检验。
对A5进行特征值分解,得到最大的特征值λ5=3.01,特征向量w5=[0.5396 0.2970 0.1634]T,一致性比率CR=0.0079<0.1,通过一致性检验。
得到ω和wi(i=1,2,3,4,5)后,依据式(3)得到综合权值,经归一化处理如表2所示。表2中的数据为每个因子的归一化权值,代表各个因子的重要性,具体而言,本模型中体积(权值为0.1991)的重要性要高于模块种类(权值为0.0495)的重要性。

表2 综合权值计算结果
4.2 评估结果计算
按照3.2节的方法先获取某一方案的隶属度矩阵,得到图 1中第2层15个因子的隶属度矩阵R如式(8)所示。
R的每一列之和为1,共15列,每一列代表每个因子的打分百分比分布,无量纲。其中,R的1~3列的转置为系统指标的隶属度矩阵,记为R1;R的4~6列的转置为综合指标的隶属度矩阵,记为R2;R的7~9列的转置为重构能力的隶属度矩阵,记为R3;R的10~12列的转置为“五性”指标的隶属度矩阵,记为R4;R的13~15列的转置为传感器能力指标的隶属度矩阵,记为R5。

(8)
R的第1列元素的含义解释为50%的专家认为该系统体积评判结果为优,30%的专家评判结果为良,20%的专家评判结果为一般。R的2~15列元素分别为专家对其他因子的评判结果。
根据式(4),将表2的综合权值和式(8)带入其中,计算图 1中第2层评估向量如式(9)所示。
(9)

模糊评判集取值如表3所示。

表3 模糊评判集取值
根据式(5),将4.1节中的w和式(9)代入其中,计算图 1中第一层评估权向量如式(10)所示,其各个元素之和为1,为归一化结果。
E=[0.4631 0.3151 0.1763 0.0455]
(10)
式(10)为对该系统的评价结果,其具体含义为46.31%的专家认为该系统总体性能为优;31.51%专家认为该系统总体性能为良;17.63%的专家认为该系统总体性能为一般;4.55%的专家认为该系统总体性能为差。为了得到该系统的具体评分,从v1、v2、v3、v4中分别取一个值,组成一个向量F,如式(11)所示。F的每个元素的含义为从各个评判等级中取一个具体数值,如93为评语为“优”的等级的一个具体打分值。
F=[93 80 68 40]
(11)
令G=EFT,根据式(10)和式(11)得G=82.1,可见该方案的性能评估结果为良。获取其他方案的隶属度矩阵,按照上述方法得到相应的评估结果,从而得到各个备选方案的精确评估结果。
4.3 评估结果分析
由评估方法的过程可知,评估结果取决于表2中的权值以及式(8)中的隶属度矩阵。而权值由成对比较矩阵计算得到,权值决定了某一个评估因子的比重,隶属度矩阵决定了专家系统对该因子的评分。综合化通信导航识别系统的评估分值为82.4,评估结果为“良”。这是因为式(9)综合评价结果中的系统指标、综合指标、重构能力和传感器能力的打分均集中在“优”和“良”,“一般”和“差”占比较小;“五性”指标中的“一般”和“差”占比较高,超过了0.4,但其权值仅为0.1093,不会对整体的评估结果造成较大影响。本文方法得到的评估结果为“良”,与定性评估得到的结果一致;而且使用本文方法能够得到定量的评估结果,若有两个方案需要进行比较,则本文方法可以给出精确评估,从而选出更好的方案。
4.4 输入输出分析
由该方法的计算过程可知,方法的输入参数包括层次结构图中的成对比较矩阵和隶属度矩阵。其中,成对比较矩阵需要评估者根据各个评估因子的相互比重关系给出;而隶属度矩阵需要对专家打分结果进行直方图统计得到。得到成对比较矩阵和隶属度矩阵后根据所提方法就可以得到最终的评估结果。最终的评估结果即为所提方法的输出,完全取决于输入参数。输入参数中的成对比较矩阵与待评价的方案无关,反映了各个影响因子的权重,而输入参数中的隶属度矩阵则是每个方案中各个影响因子性能的具体表征,成对比较矩阵和隶属度矩阵直接决定了评估结果。当增加一个新的方案时,成对比较矩阵无需改变,只需通过专家打分获得一个新的隶属度矩阵。
4.5 与其他方法的比较
经典的层次分析法适用于对多个方案进行比较,需要得到各个评估因子的权值,同时需要得到各个方案的权值,最后综合二者得到各个方案的评估结果。但经典的层次分析法是权值与权值进行综合得到的结果,得到的只是各个方案的相对比较结果,只知道各个方案的优劣次序,无法知道各个方案的“优”、“良”、“中”、“差”等级。而所提方法在经典层次分析的基础上结合模糊评判,能够得到精确的评估结果。由于经典层次分析法得到的评估结果是归一化的权值,而所提方法的评估结果是基于模糊评判集的量化值,二者的具体含义有所不同。
基于灰度函数的评估方法依赖于灰度函数的选取,相关文献中均未说明灰度函数选取的依据,缺乏理论依据;而所提方法中的模糊评判基于专家打分,通过直方图统计将专家打分转换为权值修正因子,过程简单明了,逻辑也较为清晰,理论依据较为严谨。基于灰度函数的评估方法与所提方法的评估结果是类似的,均可以得到精确的评估结果,区别在于所提方法通过直方图法获得隶属度矩阵作为修正矩阵,而基于灰度函数的评估方法通过灰度函数获得灰度矩阵。本文的隶属度矩阵即相当于基于灰度函数方法的灰度矩阵。
5 结束语
为了对综合化通信导航识别系统进行性能评估,从系统指标、综合指标、重构能力和“五性”指标4个方面建立了指标评估体系。使用层次分析法得到系统各属性的权值,基于直方图法对专家打分进行统计得到隶属度矩阵,综合属性权值和隶属度矩阵,得到系统定量的性能评估结果。所提方法对工程中精确评估综合化通信导航识别系统性能有一定的借鉴意义。
猜你喜欢
当代陕西(2022年4期)2022-04-19
建材发展导向(2022年4期)2022-03-16
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年9期)2021-11-02
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
分析化学(2017年12期)2017-12-25
天津诗人(2017年2期)2017-11-29
科技视界(2016年1期)2016-03-30
物联网技术(2015年7期)2015-07-21
