
用于创新实践教学的机械手臂平台的研究与设计
2022-05-23 06:30王明浩郎庆阳刘亚男孙宇飞栾丛宇
辽宁科技学院学报 2022年2期
王明浩,郎庆阳,赵 亮,刘亚男,孙宇飞,苏 发,栾丛宇
(辽宁科技学院 机械工程学院,辽宁 本溪 117004)
在应用型本科学生的培养过程当中,必备课堂理论教学之外,通过创新实践活动,培养学生的工程思维,锻炼学生的应用技能,十分必要。在学生创新实践活动中,一些基础知识技能,如基本的加工制造操作、机械结构三维设计、电机驱动、单片机及传感器应用、程序设计等是十分必要的。
如果单独学习以上基础知识和技能,学生往往会出现不知如何入手,没有具体目标,无法整合知识的情况,最终导致进度缓慢或者失去兴趣。通过项目设计一套能够实现具体功能,能直观看到效果,将机械结构设计和控制系统设计相结合,并且能够通过整个制造和调试的过程,学习到创新实践中常用的知识和技能很有必要[1]。
机械手臂是工业自动化的典型代表设备,也是学生普遍具有常识认知的装置,通过机械手臂平台项目,培养学生的创新实践能力和基础知识,是比较合适的选择。
1 总体方案
系统由平台、机械手臂和传送带构成主体机械结构,控制系统分为两个层面,基础的单片机控制系统和上位机软件控制系统。机械手臂和传送带放置在平台上面,位置可以自由调整,机械臂前端带有夹爪,可以夹持工件。围绕核心功能进行功能方案细化,如图1所示。

图1 机械臂平台功能方案
2 机械结构设计
系统机械结构采用SolidWorks软件进行三维建模设计[2]。在常见的三维CAD解决方案中,SolidWorks是设计过程比较简便而方便的软件之一,具有功能强大、易学易用和技术创新三大特点,非常适合学生创新实践使用。系统的机械结构方案如图2所示,主要的结构尺寸如表1所示。
平台部分采用工业铝型材作为框架和支撑,选用亚克力板作为底板。

图2 机械手臂平台的结构方案

表1 机械手臂平台主要尺寸
机械臂的主体包括底盘、机械臂和夹爪,实现夹持工件在空间内移动的功能。底盘采用磁吸的方式安装在平台上,其上与机械臂相连,通过步进电机驱动控制机械臂实现水平旋转运动。机械臂包括大臂和小臂两部分,均为连杆结构,由步进电机驱动控制,实现移动和升降的功能。夹爪由舵机控制,通过开合运动,夹持和放置工件。
传送带采用直流减速电机驱动,用来运输工件,其上配置有限位开关,实现运动定位。
通过机械结构的设计,学生可以学习到机械制图、三维建模、机械设计计算、电机选型与应用、电源选型与应用等知识。
3 控制系统设计
控制系统包括两大部分,单片机控制系统和上位机控制系统。
单片机控制系统主要负责基础的驱动和信息交互。通过控制各个电机实现运动,并结合传感器信号,实现机械结构的运动功能,通过按键、显示屏等模块,实现人机接口控制,通过通信模块获取上位机指令并反馈信息。
其中核心的部分是对电机的控制,这一方面的功能主要通过控制对应驱动模块来实现。机械手臂的底座和大小臂的动作需要控制对应步进电机运动,机械手需要控制舵机运动,传送带需要控制直流电机运动。
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步。在一般理论教学中,往往只讲述了步进电机的工作原理,并不涉及驱动控制。平台选用步进电机驱动模块来实现对步进电机的控制。常用的驱动模块有A4988、DRV8825、TB6560等,通过控制使能、方向和脉冲三个变量,就可以实现步进电机的启停、换向和加减速[3]。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机的控制信号实际上是一个脉冲宽度调制信号(PWM信号),该信号可由单片机产生。在实际应用中,单个或者数量较少的舵机,在小功率的情况下,可以由单片机直接控制。对于多个舵机的使用,一般采用舵机驱动模块来实现,如常见的16路PWM舵机驱动板模块,采用IIC接口,不占用过多单片机接口即可实现对16路舵机的控制。
直流电机是最常用的动力元件,使用方便,操控简单,一般驱动可以选用L298N模块。L298N是双H桥的直流电机驱动芯片,可以实现对直流电机的启停和方向的控制。直流电机在选用的时候,一般会选择固定速度的直流减速电机,但有些时候也需要进行速度变化,这时可以采用单片机产生PWM调速信号或者直接采用PWM直流电机调速器。
上位机控制系统是通过运行在计算机上的软件程序,控制机械手臂及传送带运动。需要使用编程软件设计用户界面和功能,并编写相关程序,与单片机控制系统进行通信。用户通过计算机上的软件界面输入控制命令,软件通过串行通信接口将控制命令以数据包形式传送给单片机,单片机系统识别指令代码,控制对应电机驱动器驱动电机完成动作。常用的上位机系统软件设计方法有采用VB/VC开发语言和使用LabVIEW开发环境两种。
Visual Basic(简称VB)和Visual C++(简称VC)都是微软公司开发的基于对象的可视化计算机程序开发语言,具有结构化、模块化、包含协助开发环境的特点[3]。
LabVIEW是由美国国家仪器(NI)公司研制开发,类似于C和BASIC开发环境。不同于其他计算机语言采用基于文本的语言产生代码,LabVIEW使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。LabVIEW开发环境集成了工程师和科学家快速构建各种应用所需的所有工具,旨在帮助工程师和科学家解决问题、提高生产力和不断创新[5]。
4 系统加工制作
系统的平台支撑结构由欧标2020工业铝型材经过锯铝机切割后组装构成。平台底板采用亚克力板材料,亚克力板具有一定的机械强度和韧性,能够满足基础的应用需求,与木板和金属板比较,最突出的特点是容易加工,一般采用激光切割机就可以快速加工。
机械手臂的零部件主要采用3D打印机技术加工。采用FDM原理的桌面式3D打印机,选用PLA材料,首先将用SolidWorks软件绘制的三维零件模型转换为STL格式文件,然后导入到3D打印机控制软件中,经过打印参数设置,继而加工完成。3D打印机在学生创新实践中的应用,极大地降低了零件加工的成本和难度,提高了迭代效率。
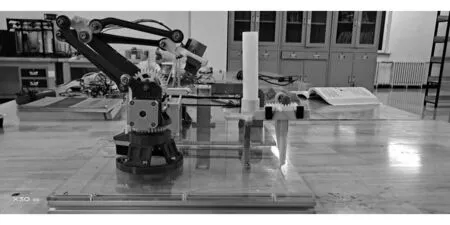
图3 机械手臂平台实物图
加工制作完成的机械手臂平台如图3所示。经过组装调试,学生可以通过编程控制,实现特定的动作和搬运功能,不同学习组可以设计不同的动作任务,非常适合教学使用,可实现的实验及学习功能如图4所示。

图4 机械手臂平台功能
5 总结
(1) 文章针对创新实验室教学实际需求,研究设计了一款用于创新实践教学的机械手臂平台。
(2) 该平台体积小,可操作性强,模块化设计,具有结构和功能的扩展性。
(3) 该平台采用3D打印等技术加工制造,成本低,性价比高。
(4) 该平台功能丰富,可以学习三维设计、加工制造、电机驱动、程序设计等知识和技能,经过试验,满足学生创新实践基础知识学习的需要。
(5) 该平台仍有进一步提升空间,通过优化结构和功能,可以实现行走移动、视觉识别和物联网等功能,为学生学习和教师科研服务。
猜你喜欢
今日农业(2020年14期)2020-12-14
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
自动化学报(2019年6期)2019-07-23
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
少儿科学周刊·少年版(2015年4期)2015-07-07
舰船科学技术(2015年8期)2015-02-27
