对胡克定律实验中密绕紧贴弹簧的问题及修正研究
2022-05-23 12:47:36王立斌
物理教师 2022年4期
王立斌
(复旦大学附属中学,上海 200433)
1 研究背景
“探究弹簧弹力与形变量的关系”的实验,以下简称“胡克定律”实验,是探究弹簧在发形变时,其形变与弹的定量关系,得到“弹簧发弹性形变时,弹的大跟弹簧伸长(或缩短)的长度成正比”的规律,即胡克定律.本实验隶属于高中物理课程标准(2017版)“必修1中1.2相互作用与运动定律主题”,属于学生必做实验.[1]
在教学实践过程中,导致实验结果与实验预期结果不一致的原因很多,弹簧自身的问题是一个重要的因素.笔者在对“胡克定律”实验装置和实验过程进行优化的基础上,对因密绕紧贴弹簧而产生的问题进行了研究,提出了修正弹簧的方法,并对修正方法进行了实验检验.
2 问题的产生
原实验装置如图1所示,主要用到弹簧、刻度尺、钩码、铁架台、铁夹等.实验时通过在弹簧下端添加钩码改变弹簧伸长,记录钩码质量和对应的弹簧长度.悬挂钩码时的弹簧长度减去未挂钩码时弹簧的长度,即为弹簧伸长.每次钩码平衡时,钩码的重力等于此时弹簧的弹力.
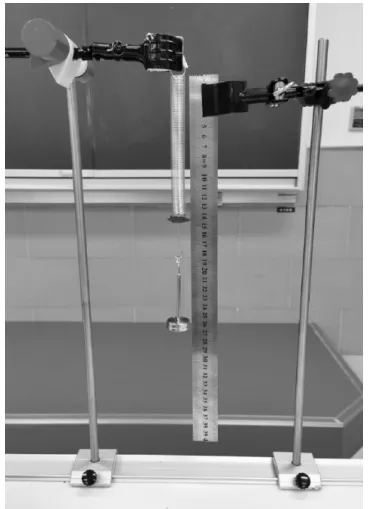
图1 原实验装置
通过画弹簧弹力与弹簧伸长的关系图(F-x图),即可探究弹力与形变量的关系.有时会出现如图2所示的F-x图.在弹力与形变量的关系图中,截距不为0,则不能说明弹簧弹力与形变量成正比.产生这种图像的弹簧如图3所示,外观具有密绕圆圈紧贴的特点.通过交流,笔者了解到,这种案例并非个案,具有一定的普遍性.但并未见到相关解释资料.笔者对此进行了研究.
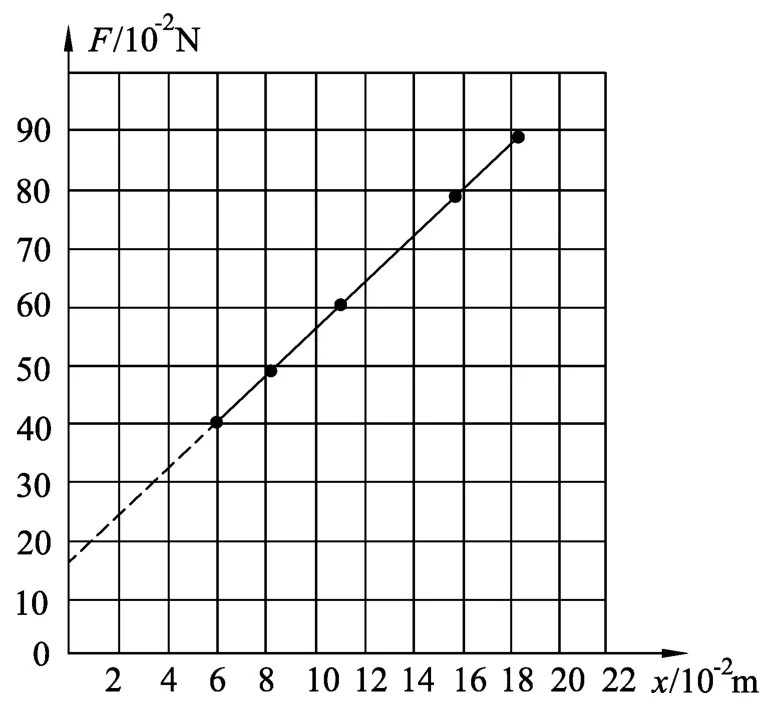
图2 弹簧弹力与弹簧伸长的关系图
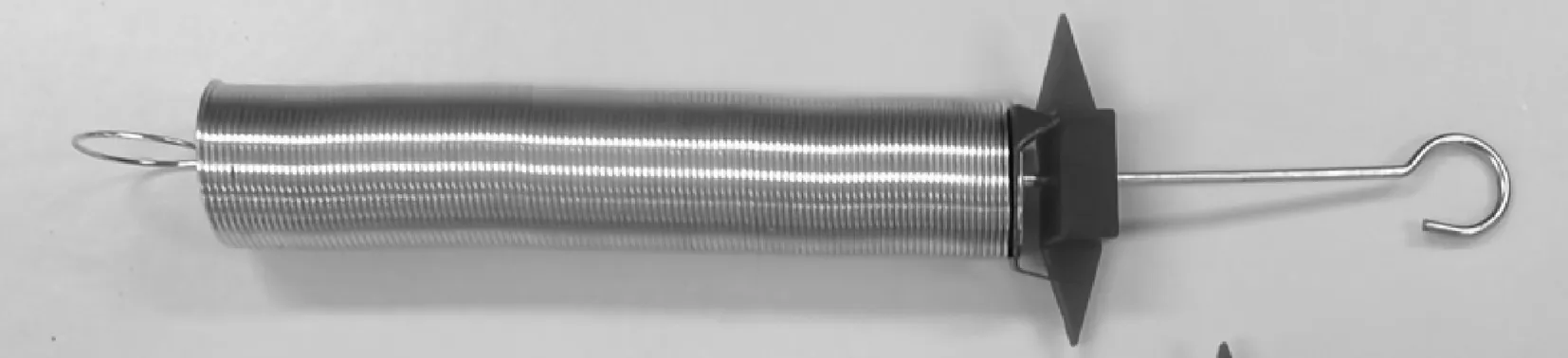
图3 密绕圆圈紧贴弹簧(本文简称为密绕紧贴弹簧)
3 问题的分析与实验研究
3.1 理论分析和猜想
在密绕圆圈(非紧贴)弹簧中,弹簧的形变涉及拉伸,弯曲和扭转,其中扭转起主要作用,其他的可以忽略不计.[2]扭转形变实质上是由剪切形变组成的.用圆柱体扭转形变的基本公式可以推导得到密绕圆圈(非紧贴)弹簧所受拉力F与伸长量x的关系为

其中N为材料的剪切模量,R为弹簧金属丝的半径,n为弹簧的匝数,r为弹簧的半径,x为弹簧的总伸长量.
(1)式的推导是基于弹簧线圈之间非紧贴的情况展开的.对于密绕紧贴弹簧则不一定试用.
在图2所示的弹力与形变量的关系图中,截距不为0,图像的直观解释可以为“表面形变量”为零时,弹簧中仍然有弹力,说明弹簧仍然有收缩趋势.
工业生产中,弹簧钢的压力加工方式有热轧、冷拉,锻制等,热处理方式有 “去应力处理”、“不处理”等.不同的加工和处理方式造成弹簧钢的应力性能差异较大,同理会影响到最终成品弹簧的性能.例如,金属丝在冷弯曲成形螺旋弹簧后会产生很大回弹.[3]
笔者做了如下猜想,对成品弹簧而言,存在着“表面形变量”为0,但弹簧内部仍然有(剪切)应变的可能,导致剪切应力不为0,弹簧仍然收缩的趋势.宏观上,有收缩趋势的相邻弹簧圈接触在一起,因挤压产生的额外弹力阻碍了弹簧的进一步收缩,达到了力学平衡.
3.2 设计实验进行验证
为了证明猜想的正确性,笔者设计了如图4所示的装置进行验证.
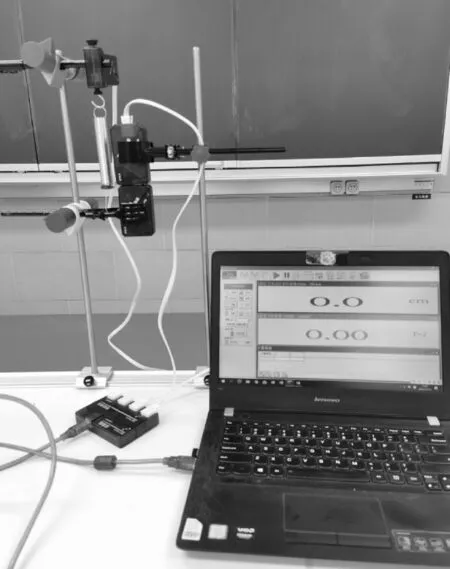
图4 改进后的实验装置图
3.2.1 实验器材
实验用到的器材主要有(朗威)DIS实验系统(含力传感器、位移传感器),弹簧,铁架台、铁夹等.
3.2.2 实验装置搭建的步骤及主要原理
(1)在铁架台上固定力传感器.
(2)在力传感器下方悬挂待检测弹簧,进入软件界面,在弹簧自然悬挂状态下对力传感器调零.
(3)将位移传感器发射端固定在铁夹上(后面称此为铁夹1),同时将弹簧下端挂在铁夹1上.调节铁夹1的高度,当力传感器的示数从正数(测拉伸力)恰减小为0时,固定铁夹1.之后实验时力传感器的示数即为外界对弹簧的拉力F.
(4)将位移传感器接收端固定在另一个铁夹上(后面称此为铁夹2),调节铁夹2,使得位移传感器接收端与发射端正对,当位移传感器示数为0时固定铁夹2.之后实验时位移传感器的示数等于弹簧的拉伸量x.
(5)点击开始记录按钮,旋松铁夹1的螺丝,使得铁夹1(连同位移传感器)缓慢下降.多次采集力和位移数据并分析.
(6)更换其他疑似问题弹簧,重复上面的步骤.
3.2.3 实验数据分析
将疑似问题弹簧的F、x数据画散点图进行分析,均得到了如图5所示的图像.
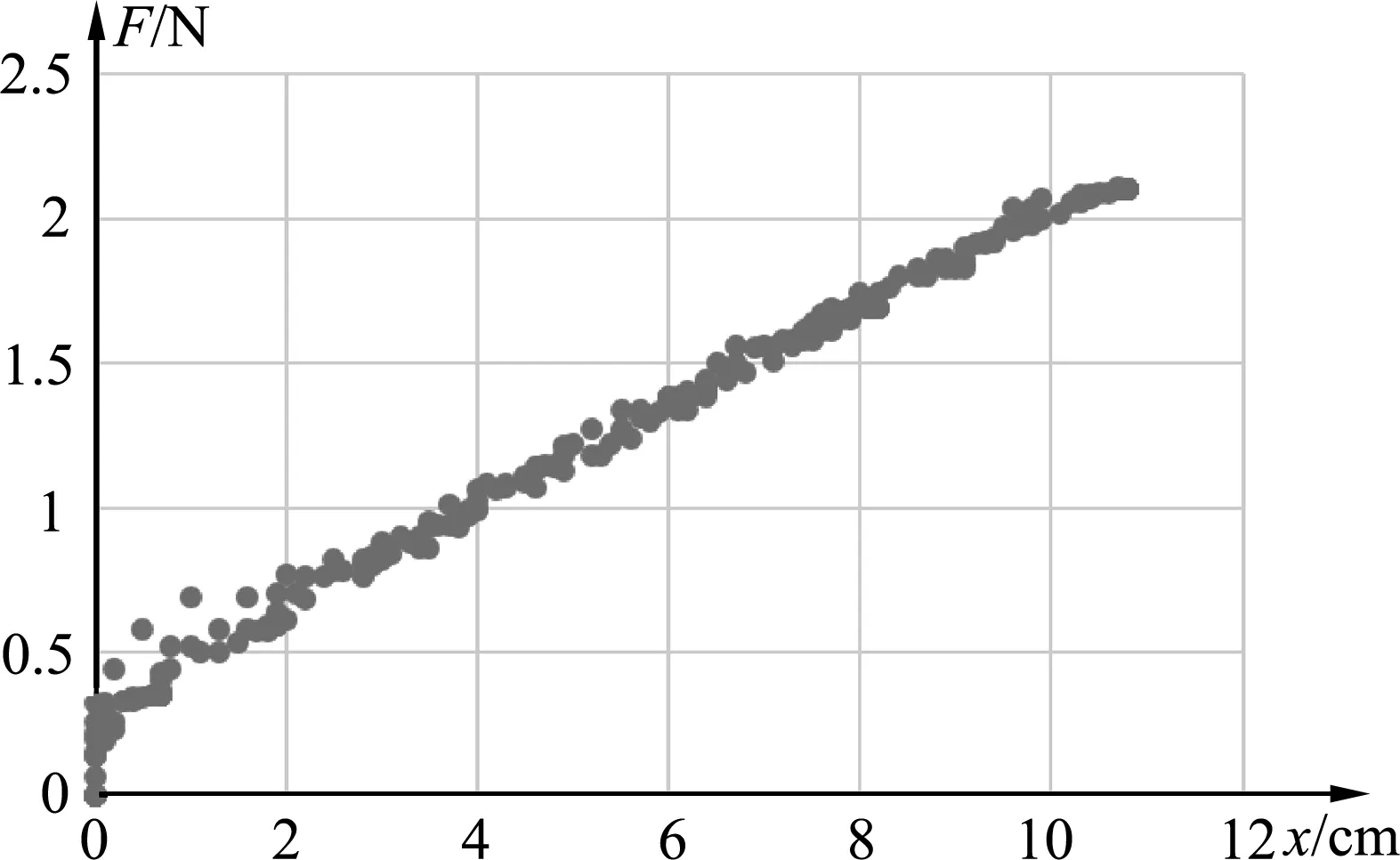
图5 疑似问题弹簧的F、x数据散点图示例
从图5可以看到,在x=0时,存在多处拉力F不为0的位置,这与预期的结果一致,即此弹簧存在初始收缩力F0.当弹簧受到的拉力小于F0时,弹簧并不会被拉伸,弹簧下端的位移为0.图5中的初始收缩力约为0.27 N.
对于存在初始收缩力的弹簧,即密绕紧贴的弹簧,当弹簧受到的拉力大于F0时,弹簧才能被拉伸.由图5可知,此时弹簧下端点施加的弹力,等于受到的拉力F,并不与弹簧形变量x成正比,而是要扣除F0后才能与x成正比.其数学表达式为F-F0=kx,即对于密绕紧贴的弹簧,弹力F与形变量x成线性关系,而不是正比关系.
4 通过修正弹簧解决问题
4.1 修正弹簧的意义
在实际使用中,很多情境下,弹簧弹力F与其形变量x成正比是必须要满足的先决条件,例如“制作弹簧测力计”.对于初学胡克定律的中学生而言,相比于使用“F-x仅满足线性关系的弹簧”,使用“F-x满足正比关系的弹簧”在理解胡克定律的时候显然会更容易些.
而对于“仅满足线性关系的弹簧”,搁置、丢弃显然是资源的浪费,与环保价值观不符合.
如果能将“F-x仅满足线性关系的弹簧”转变为“F-x满足正比关系的弹簧”,将显著提高资源的利用率,降低学生学习过程中不必要的干扰因素.
4.2 修正弹簧的方法
在工业生产中,使用机械拉伸法可以去除材料内的应力,[4]即用部分塑性应变抵消部分弹性应变.根据这一原理,采用如下方法修正弹簧.
(1)测量弹簧拉伸前的原长,设为L0.
(2)手持弹簧的两端,增加拉力,拉伸弹簧至长度为原长的2倍,即2 L0后,减小拉力,使弹簧恢复到自然伸长状态,测量此时弹簧的长度,设为拉伸释放后弹簧的原长L.
(3)如此往复,分别拉伸弹簧至3 L0,4 L0,5 L0…直至拉伸释放后弹簧的长度为L与弹簧的拉伸前原长L0不一致,即发生范性形变时停止拉伸.例如L比L0大1 cm时结束拉伸,弹簧修正完毕.如图6所示,将某弹簧拉伸至原长10倍长度后释放,原长比拉伸前增加约1.6 cm.

图6 同规格的两个弹簧在拉伸前后的对比图(上方为未拉伸时候的状态,下方为10倍拉伸释放后的状态)
4.3 修正后弹簧的表观特征
与修正前相比,修正后的弹簧,表观上,弹簧相邻金属圈之间不再紧密接触,有了肉眼可见的缝隙甚至是明显分离,轻拉弹簧后释放,能够看到弹簧的细微振动.
4.4 修正弹簧的检验
修正弹簧的目标是为了将“F-x仅满足线性关系的弹簧”转变为“F-x满足正比关系的弹簧”.为此需要检验修正后的弹簧 “弹力与形变量是否满足正比关系”.
4.4.1 被检验弹簧的一些参数
笔者选取了4种规格的“问题弹簧”,修正前,其弹力与形变量均不满足正比关系,但满足线性关系.被检验弹簧的拉伸前后的参数如表1所示.
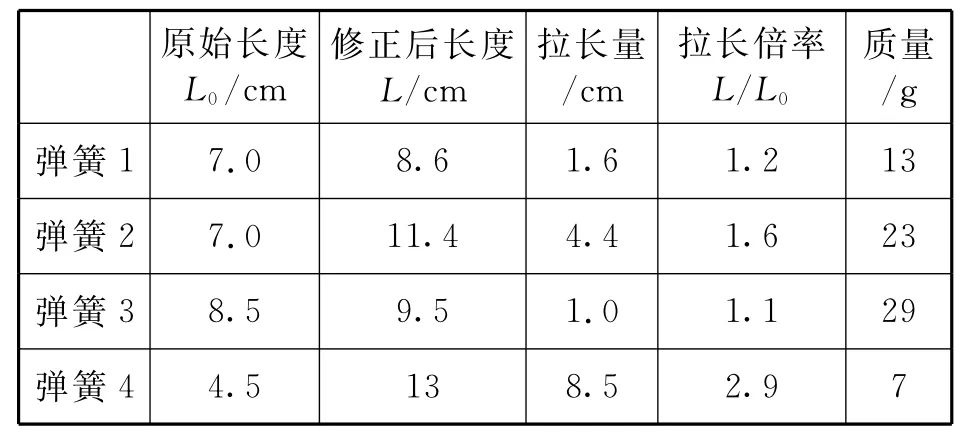
表1 4种被检验“问题弹簧”的参数
4.4.2 检验方法和检测结果
用图4所示装置,采集“问题弹簧”在修正前后的弹力F和形变量x数据,绘制F-x图,进行对比分析.F-x图对比示例如图7所示.
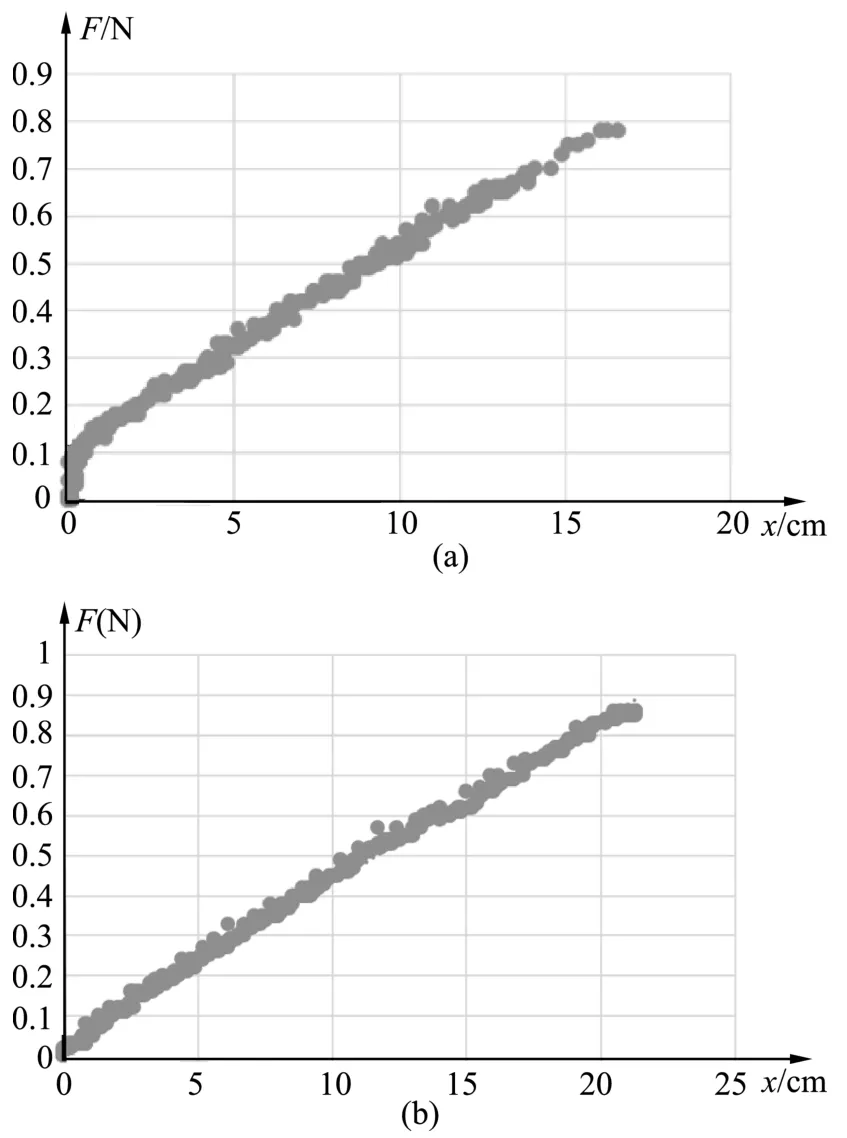
图7 弹簧1在修正前后的F-x图(a)为未拉伸时,(b)为拉伸修正后.
满足胡克定律的弹簧,F-x图中直线斜率为弹簧的弹性系数k.
对各“问题弹簧”修正前的F-x图中的直线部分进行线性拟合,自变量x前的系数仍具有弹性系数的量纲和意义,在此仍旧称为弹性系数k.线性拟合后,纵轴截距对应于形变量为0时的弹力,在本文称之为初始收缩力F0.
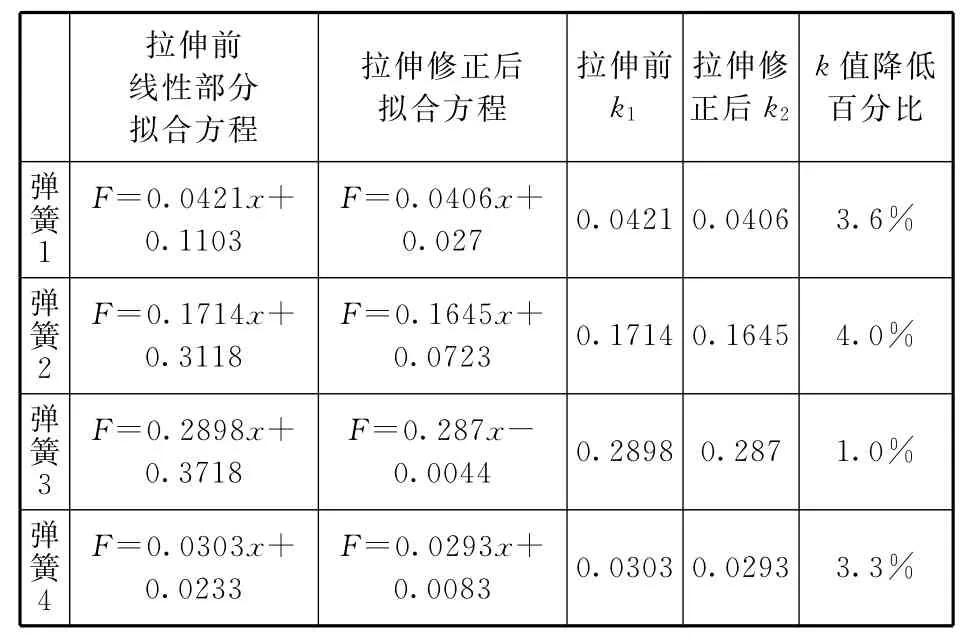
表2 4种被检验“问题弹簧”在拉伸前后的F-x图拟合方程及数据分析
4.4.3 检测结果分析
从图7可以看出,修正后的弹簧,弹力F与形变量x满足良好的正比关系.
对比表2中拟合方程的截距可以看出,修正后,截距几乎降为0,即通过拉伸,良好地消除了“问题弹簧”的初始收缩力F0.
通过表2中的弹性系数k的变化可以看出,拉伸后弹簧的k值都略有下降,但k值降低百分比较小,在笔者的实验中,k值降低百分比都在4%以内.
4.5 实验结论
可以通过“拉伸法”对密绕紧贴弹簧进行修正,“拉伸法”能降低密绕紧贴弹簧的初始收缩力.在一定范围内,修正后的弹簧仍具有良好的弹性,并且,弹力F与形变量x能够满足良好的正比关系.
猜你喜欢
中老年保健(2021年3期)2021-08-22 06:50:32
航空发动机(2020年3期)2020-07-24 09:03:16
民间故事选刊·上(2018年2期)2018-03-02 05:48:40
发明与创新·中学生(2018年2期)2018-02-07 20:23:21
时代英语·高二(2017年4期)2017-08-11 07:37:57
青少年日记·小学生版(2017年5期)2017-07-07 12:11:45
小小说月刊·下半月(2017年5期)2017-05-19 15:22:56
天津体育学院学报(2016年3期)2016-12-18 08:24:54
儿童故事画报(2013年3期)2013-06-24 05:40:30
读写算(中)(2012年7期)2012-02-27 01:11:50